什么是具身智能底盘?4 类主流 AI 机器人底盘选型|VLA/ROS2 项目硬件指南
0.前言
在具身智能机器人开发中,AI 具身智能、VLA 大模型落地,机械臂、视觉算法往往会受到更多关注,但是适配具身交互的智能移动底盘,才是机器人 SLAM 导航、移动抓取的硬件基础,不少科研踩坑都是选错 ROS2 机器人底盘导致项目延期。
错误的底盘选型可能导致:
SLAM精度下降
训练数据污染
机械臂操作抖动
ROS2系统适配困难
后续功能扩展受限
本文将从具身智能开发视角出发,分析主流移动底盘架构的特点、优劣势及适用场景,帮助开发者快速完成选型决策。
关键词:具身智能,移动底盘,SLAM 导航,松灵机器人,VLA 大模型,ROS 2
参考资料:
- 四轮四转底盘:https://www.agilex.ai/page/6908c1285e78cfa260412be9?mi=0&rn=RANGER+MINI+3.0
- 四轮差速底盘:https://www.agilex.ai/page/6908c7205e78cfa260412bf7?mi=0&rn=SCOUT+2.0
- 阿克曼底盘:https://www.agilex.ai/page/690a27c15e78cfa260412c79
- 履带底盘:https://www.agilex.ai/page/6908b8485e78cfa260412bd5?mi=0&rn=BUNKER+PRO+2.0
- ROS2 diff_drive 官方参数手册:https://control.ros.org/master/doc/ros2_control_controllers/doc/diff_drive_controller.html
- 松灵官方 ROS2 开源驱动仓库(四驱四转 / 差速底盘源码、运动学插件、URDF、仿真包):https://github.com/agilexroboti
1.入门认知:厘清具身智能底盘的核心定位
1.1 什么是具身智能?具身智能底盘起到什么作用?
简单来说,具身智能(Embodied AI)是指智能体通过物理实体与真实环境进行实时交互,在“感知-认知-行动”的闭环中不断学习与进化的能力。它不仅是一个算法问题,更是软硬件协同的终极考验。无论是大模型微调还是强化学习迭代,最终都需要一个物理载体在真实世界中完成验证。落地实体机器人离不开标准化具身智能底盘载体。
1.2 为什么具身智能研发离不开智能移动底盘
在讨论具身智能时,人们容易忽略一个最基本的问题:机器人如何到达任务发生的位置?
无论是去厨房取水,还是在仓库跨区域搬运,移动都是执行任务的第一步。底盘不仅是承载平台,更是连接“感知系统(双目/激光雷达/IMU)”、“决策系统(边缘计算/大模型)”与“执行系统(机械臂)”的核心枢纽。
1.3 轮式机器人底盘为什么是现阶段具身智能研发主流?
尽管人形双足/四足机器人热度极高,但在当前的产业化落地与算法研发中,轮式/履带式移动方案占据 64.2% 以上的市场份额(市场规模达48.6亿元)。
💡 轮式底盘核心优势: 结构简单、控制算法成熟、ROS2生态完善、超长续航、高效率数据采集
机器人学先驱 Rodney Brooks 曾指出:“智能的关键不在于机器人是否像人一样行走,而在于机器人能否高效完成任务。” 轮式底盘正是目前效率最高、成本最优的解决方案。
因此以四轮差速、阿克曼以及四轮四转为例的轮式底盘是高校科研标配。
2.四大主流具身智能底盘架构深度对比
4 大类具身智能机器人底盘优缺点对比|ROS2 科研底盘选型参考
| 底盘类型 | 转向方式 | 转弯半径 | 地形适应性 | 运动平稳度 | 推荐具身智能场景 | 典型代表(松灵) |
| 四轮差速 | 左右两侧转速差 | 0 (可原地自转) | 室内/轻度户外 | 中等 | 算法验证、室内移动操作、RL训练 | SCOUT 2.0 |
| 阿克曼 | 前轮机械转向 | 较大 | 室外/公路/园区 | 极高 (高速平稳) | 自动驾驶、长途巡检、园区配送 | HUNTER 2.0 |
| 履带式 | 履带差速转向 | 0 (可原地自转) | 极强 (泥沙/废墟/雪地) | 较低 (震动大) | 野外勘探、应急救援、特种移动操作 | BUNKER PRO |
| 四轮四转 | 四轮独立转向/驱动 | 极小 (支持蟹行) | 室内外通用 | 高 | 狭窄空间避障、高精度移动操作、VLA部署 | RANGER MINI 3.0 |
2.1 四轮差速底盘|科研入门首选 ROS2 移动底盘
四轮差速底盘通过控制左右两侧车轮的速度差实现转向,无需复杂的机械转向机构。它是 ROS 2 导航、SLAM 建图、强化学习中最常见的开发平台。
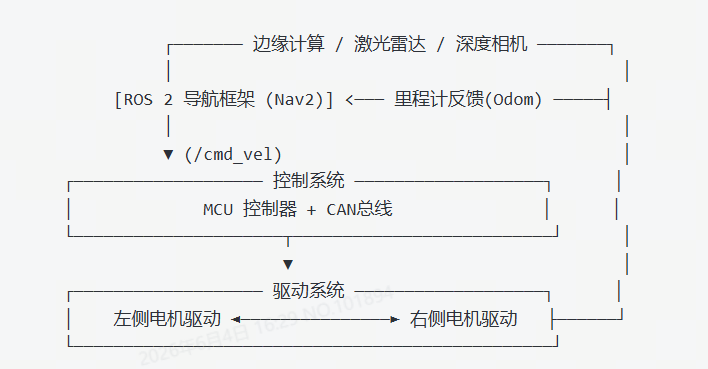
2.1.1 架构剖析
-
驱动与控制: 结构极简,直接接收
/cmd_vel速度指令,通过 MCU 计算出左右轮的目标转速。 -
感知反馈: 依赖高精度编码器(Encoder)、IMU 构成里程计(Odometry),直接为 SLAM 提供底层数据。
-
机械承载: 平台刚度高,直接决定了其搭载机械臂进行“移动抓取(Mobile Manipulation)”时的末端精度。
2.1.2 具身智能适用场景
-
高校科研与算法验证: 运动模型简单,完美兼容 Nav2、Cartographer 等主流框架,让开发者专注于上层算法。
-
典型代表——松灵 SCOUT 2.0: 支持 ROS 2,拥有开放的二次开发接口。其出色的越障与爬坡能力,使其不仅适用于室内,也能在轻度户外(草地、砂石路)为 VLA 模型的实车训练提供高质、稳定的数据采集支持。

2.2 阿克曼底盘|室外自动驾驶、园区巡检专用智能底盘
阿克曼底盘模拟乘用车的机械转向几何设计,前轮转向、后轮驱动。
2.2.1 架构剖析
-
转向系统: 采用阿克曼梯形机构,车辆转弯时内侧车轮转向角大于外侧,保证车轮纯滚动,消除了轮胎侧滑引起的里程计误差。
-
优势: 相比差速底盘,阿克曼底盘在高速行驶时姿态极稳,能耗和轮胎磨损极低。
2.2.2 具身智能适用场景
-
室外具身智能与自动驾驶微缩验证: 适用于园区配送、长途巡检、智慧农业等场景。
-
典型代表——松灵 HUNTER 2.0: 该底盘最大载荷达 150kg,具备媲美乘用车级的操控质感。其搭载的车规级独立悬挂避震系统,能在室外长距离巡航中大幅过滤高频震动与颠簸,有效消除相机与激光雷达的物理抖动,从物理源头避免图像拖影与点云畸变,为感知大模型提供高保真、高清晰度的实时数据流。

2.3 履带式机器人底盘|野外恶劣地形特种具身智能硬件
面对泥地、沙地、碎石及建筑废墟等非结构化环境,传统的轮式底盘容易打滑陷车,履带底盘则是特种具身智能的首选。
2.3.1 架构剖析
-
接地比压低: 巨大的接地面积使其对地面压强极小,抓地力及越障高度远超轮式底盘。
-
承载能力强: 机械刚性极高,能够承载重型机械臂、工业级计算平台和多线激光雷达。
2.3.2 具身智能适用场景
-
特种具身机器人: 矿山巡检、应急救援、野外环境探索等。
-
典型代表——松灵 BUNKER PRO: 具备 IP67 级高防护防尘防水能力,开放的 ROS 2 接口允许开发者快速挂接多模态感知设备。在极恶劣环境下,BUNKER PRO 能够保障底层物理移动的绝对高可靠性。
2.4 四轮四转全向底盘|Mobile ALOHA、窄空间机械臂抓取优选
四轮四转(4WD-4WS)底盘每个车轮均可独立驱动并主动控制转向角度。
2.4.1 架构剖析
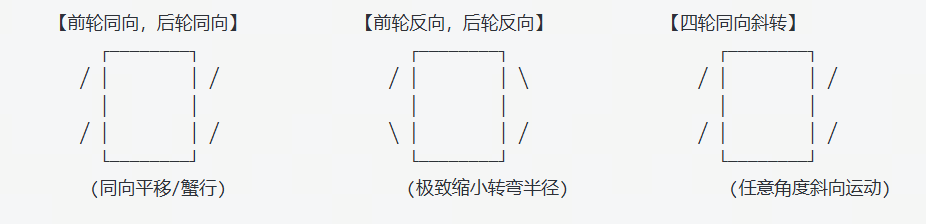
-
全向机动性: 支持阿克曼转向、原地自转、斜向蟹行(Crab Steering)等多种运动模式。
-
控制复杂度: 需要高算力 VCU 实时协同计算四个轮子的转角与转速(通常基于 EtherCAT 或 CAN 总线)。
2.4.2 具身智能适用场景
-
狭窄空间移动操作(Mobile Manipulation): 机器人需要一边横向平移,一边控制机械臂精准抓取物品。四轮四转提供了无死角的调整姿态能力。
-
典型代表——松灵 RANGER MINI 3.0: 将四轮四转的灵活性发挥到极致。在室内货架通道、实验室或医院等逼仄环境中,RANGER MINI 3.0 能在不改变车头朝向的情况下完成横移避障,与 VLA 模型的空间动作规划(Spatial Action Planning)完美契合。

总结:如何为您的具身智能项目选择底盘?
底盘选型不是“越贵越好”或“越复杂越好”,而是要与算法目标和应用场景深度匹配:
-
如果是科研院校的工作者,主攻室内导航、SLAM、轻量级机械臂抓取或强化学习: 首选【四轮差速底盘】,开发生态最成熟,试错成本最低。
-
如果适用场景处于园区、室外公路,主攻室外长距离配送或大范围巡检: 首选【阿克曼底盘】,续航久、时速快、姿态平稳。
-
如果适用场景属于野外勘探、矿山、抢险救援等恶劣非结构化环境: 首选【履带底盘】,通过性是第一优先级。
-
如果需要部署高精度移动操作大模型(如 Mobile ALOHA 类似项目),且空间狭窄繁琐: 首选【四轮四转底盘】,极致的机动性可大幅降低算法在空间规划上的难度。
从 VLA 大模型训练、SLAM 建图到 Mobile ALOHA 移动抓取,根据使用环境挑选适配的具身智能底盘,是 AI 机器人项目落地关键;四轮差速、阿克曼、履带、四轮四转四大 ROS2 开源底盘覆盖全场景科研需求。选择一款稳定、开放、生态完善且易扩展的移动底盘,是具身智能项目安全落地物理世界的第一步。


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 2
2 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)