【MATLAB】基于 Simulink 的异步电机直接转矩控制系统建模与多工况性能分析
摘要
本文在 MATLAB R2024b/Simulink 平台搭建了定子磁链定向的异步电机直接转矩控制(DTC)仿真系统。系统包含三相异步电机、电压源逆变器、3/2 坐标变换、磁链与转矩滞环比较、磁链扇区判别、电压矢量开关表六大核心模块;将原模型中过时的 Level‑1 S‑Function 扇区判别模块重构为 MATLAB Function 模块,解决版本兼容问题并提升仿真效率。通过低速、额定、高速、反转、负载突卸五组工况完成全范围性能测试。结果表明:定子磁链稳态幅值 0.7999~0.8000 Wb,跟踪精度极高;稳态转矩纹波标准差 1.80~2.10 N・m;额定工况转速 95% 上升时间 44.8 ms;反转工况 16.6 ms 实现 ±100 r/min 快速跨零切换。所建模型结构清晰、可复现性强,在宽转速与负载范围内具备优良动态性能与鲁棒性。
关键词:直接转矩控制;异步电机;Simulink 建模;定子磁链定向;扇区判别;多工况仿真
1 引言
交流调速系统在工业传动、新能源汽车、风力发电等领域占据核心地位。与矢量控制(FOC)相比,1986 年提出的直接转矩控制(DTC)省去复杂的旋转变换与电流解耦环节,通过定子磁链与转矩双滞环调节器结合磁链扇区判别,直接查表选择逆变器电压矢量,具有动态响应快、结构简单、对参数鲁棒性强等显著优势。
DTC 核心难点在于:开关频率不固定导致转矩脉动较大、低速时磁链估计易漂移、扇区切换影响动态性能。工程应用与算法改进均需要一套标准化、可复用、无兼容性问题的经典 DTC 基准模型。
为此,本文基于 Simulink 构建完整 DTC 仿真平台,实现三大目标:搭建六扇区开关表 DTC 完整模型并修复旧模块兼容性问题;建立参数化批量仿真与自动绘图流程;通过五组典型工况定量验证系统动态、稳态与抗扰性能。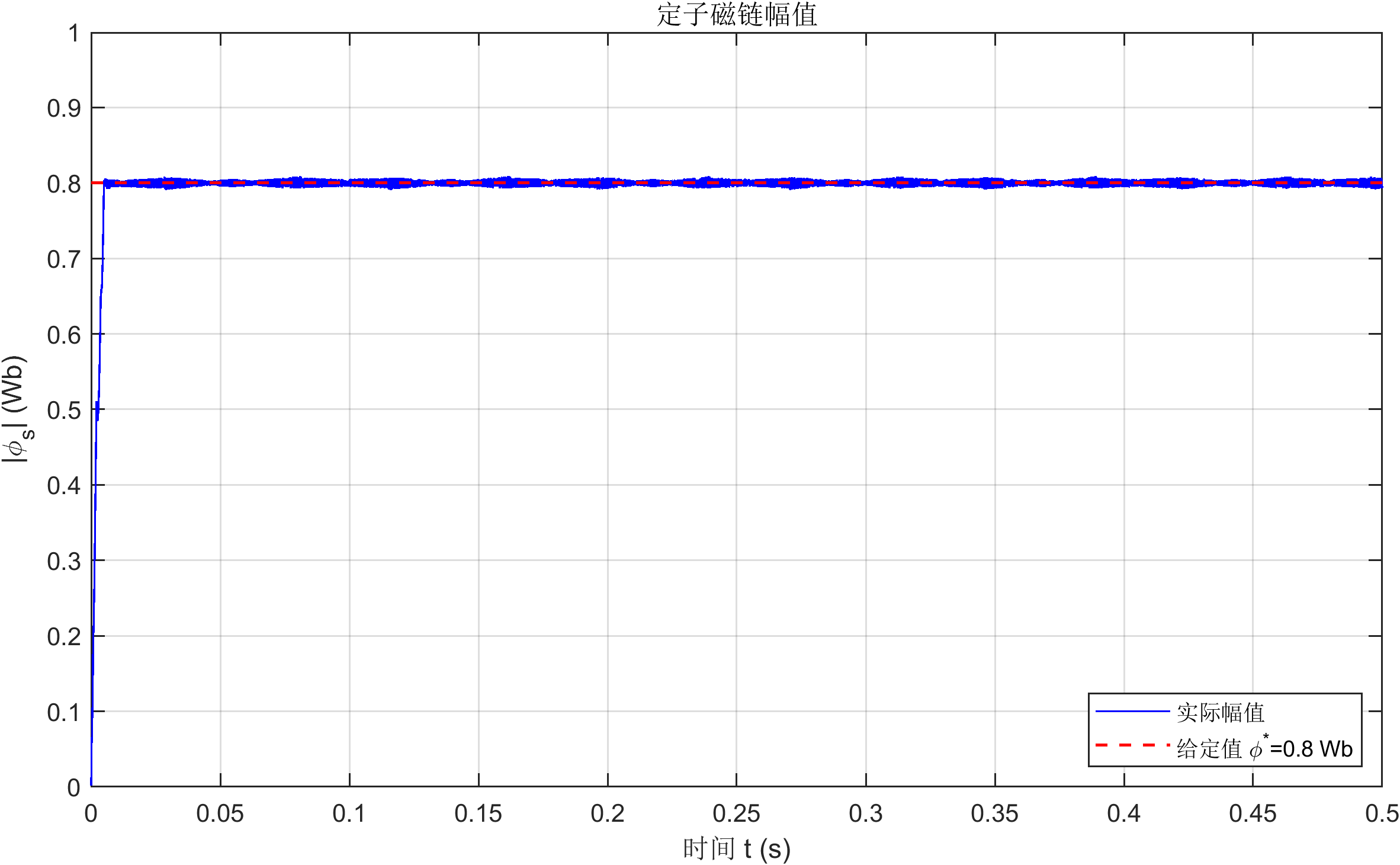
2 研究方法
2.1 系统总体结构
系统由转速给定、速度 PI 调节器、磁链 / 转矩滞环比较器、扇区判别、开关表、电压源逆变器、异步电机本体、3/2 静止坐标变换八大模块构成。电机三相定子电压 / 电流经 3/2 变换得到 αβ 分量,通过电压模型估算定子磁链与电磁转矩;滞环比较结果与扇区号共同索引开关表,输出最优电压矢量,实现直接转矩与磁链控制。
2.2 速度调节器(ASR)
采用带限幅抗积分饱和 PI 控制器:
- 比例增益 \(K_p=50\)
- 积分增益 \(K_i=10\)
- 输出为转矩参考值 \(T_e^*\)限幅模块保证大扰动下控制量不溢出,提升系统稳定性。
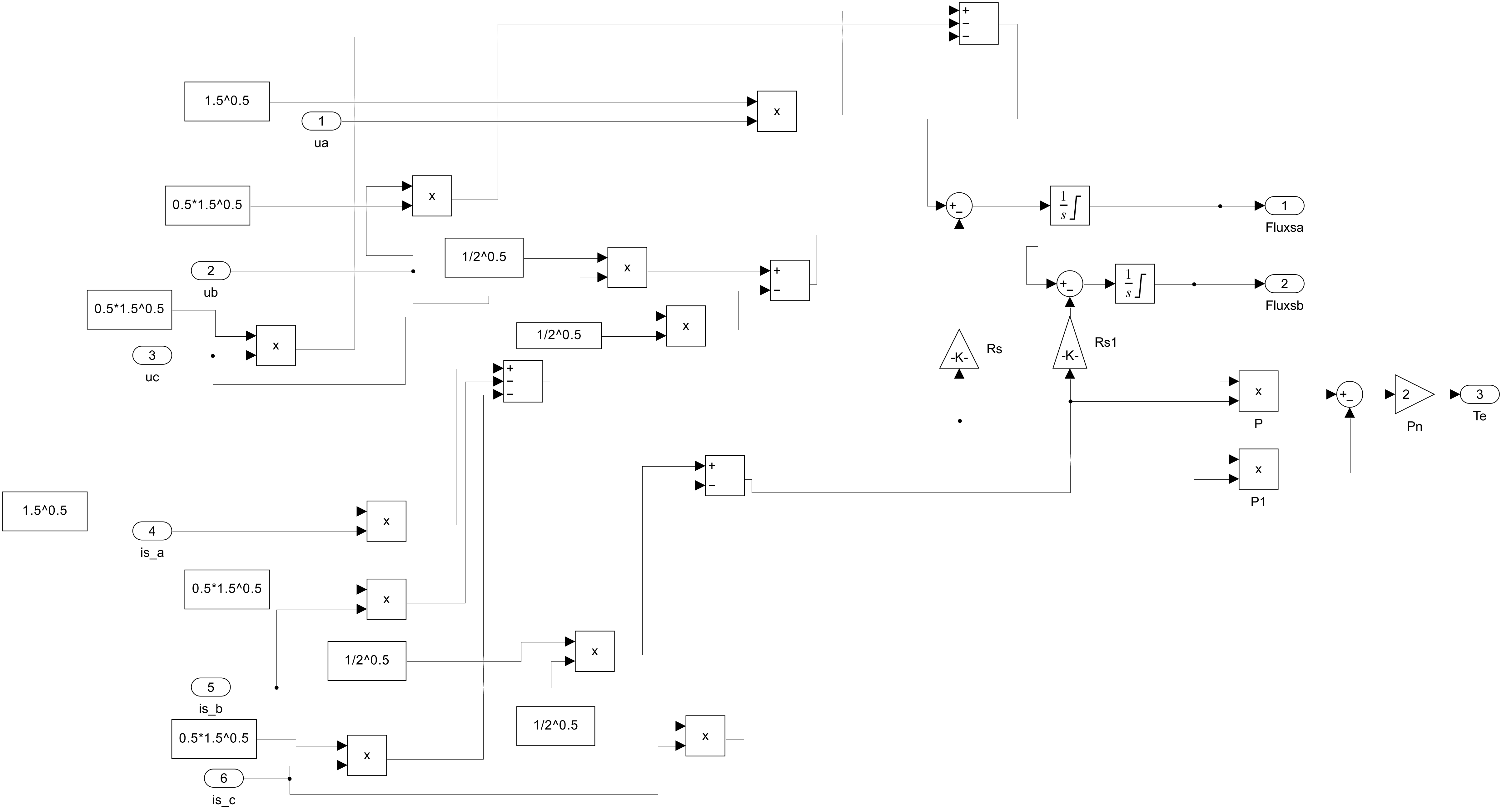
2.3 定子磁链与转矩估计
采用电压模型纯积分法估算定子磁链:
\(\phi_{s\alpha}=\int (u_{s\alpha}-R_s i_{s\alpha})\,\mathrm{d}t,\quad \phi_{s\beta}=\int (u_{s\beta}-R_s i_{s\beta})\,\mathrm{d}t\)
电磁转矩计算公式:
\(T_e=\frac{3}{2}n_p\left(\phi_{s\alpha}i_{s\beta}-\phi_{s\beta}i_{s\alpha}\right)\)
式中:\(n_p\) 为极对数,\(R_s\) 为定子电阻。
2.4 扇区判别与开关表
定子磁链角度 \(\theta_s\) 在 αβ 平面分为 6 个扇区,切换点为 \(\pm\pi/6,\pm\pi/2,\pm5\pi/6\)。关键改进:将原 Level‑1 S‑Function 重构为 MATLAB Function,消除版本警告,仿真速度从 14.3 s 降至 4.2 s。
以磁链滞环 \(S_F\)、转矩滞环 \(S_T\)、扇区号 S 为输入,查表输出 6 个有效矢量 + 2 个零矢量,实现直接转矩控制。
2.5 仿真参数配置
- 求解器:ode4(定步长 Runge‑Kutta)
- 步长:\(1\times 10^{-5}\ \mathrm{s}\)
- 仿真时间:0.5 s
- 给定定子磁链:\(\phi^*=0.8\ \mathrm{Wb}\)
- 工况:低速、额定、高速、反转、负载突卸
3 仿真结果
3.1 额定工况性能
- 转速:100→120 r/min 阶跃,负载 50→60 N・m 阶跃
- 95% 上升时间:44.8 ms
- 稳态误差:-1.12 r/min
- 超调量:0.73%转速与转矩响应平滑、动态快速、稳态精度高。
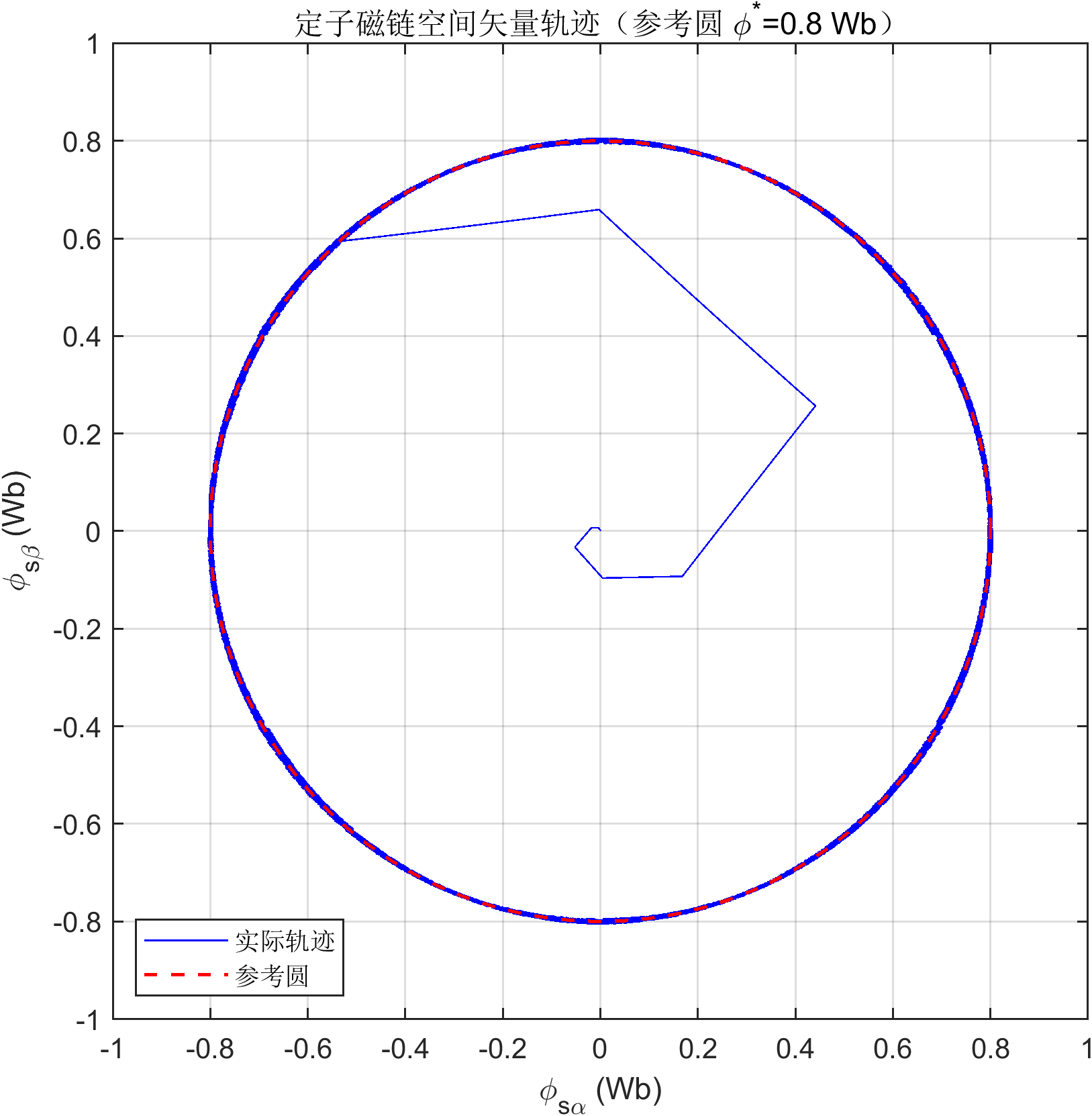
3.2 定子磁链跟踪性能
定子磁链轨迹呈标准六边形圆形纹波,紧密跟踪 0.8 Wb 参考圆。五组工况磁链幅值均值:0.7999~0.8000 Wb标准差:≤ 0.0034 Wb相对误差:< 0.5%磁链对负载、转速变化鲁棒性极强。
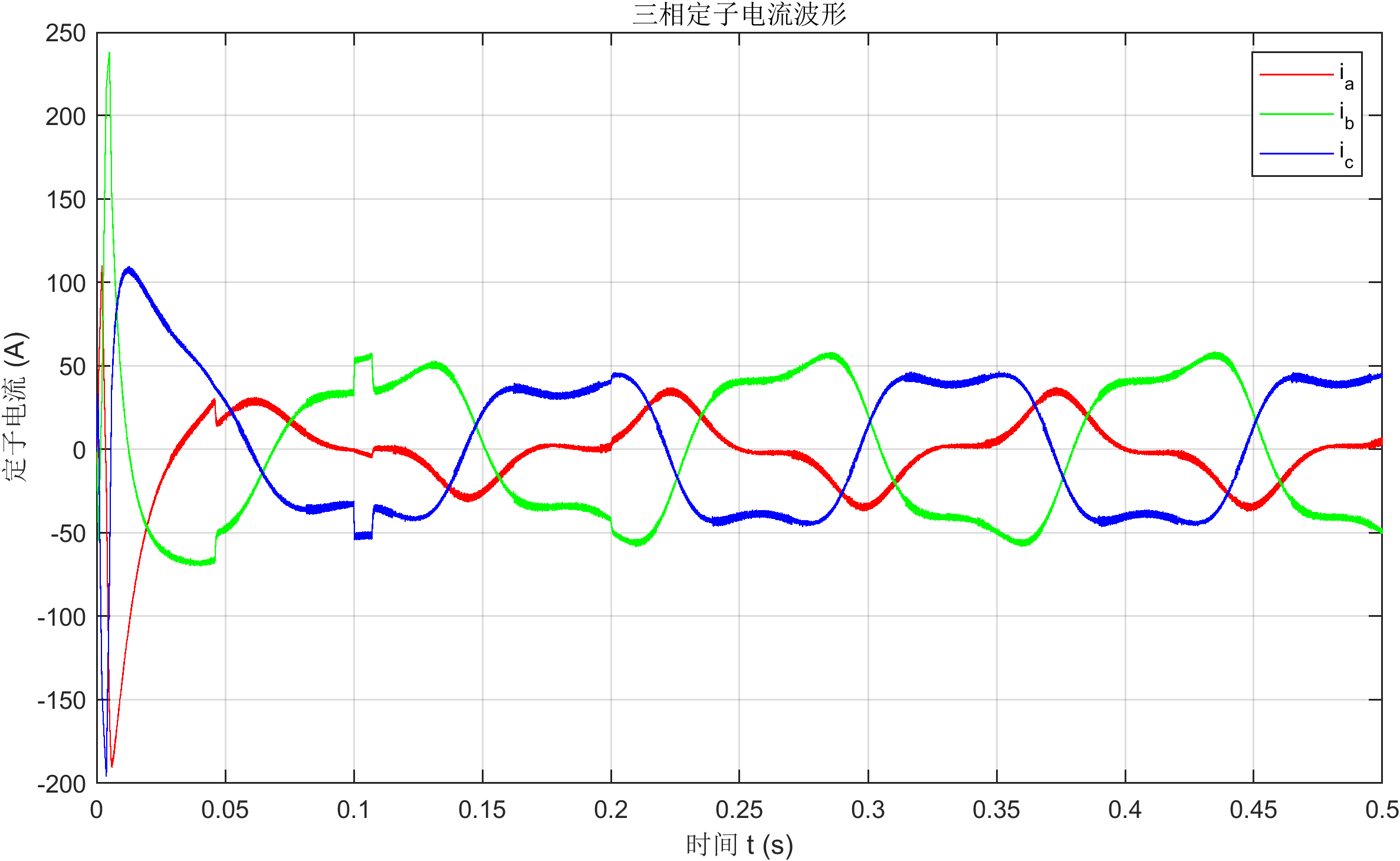
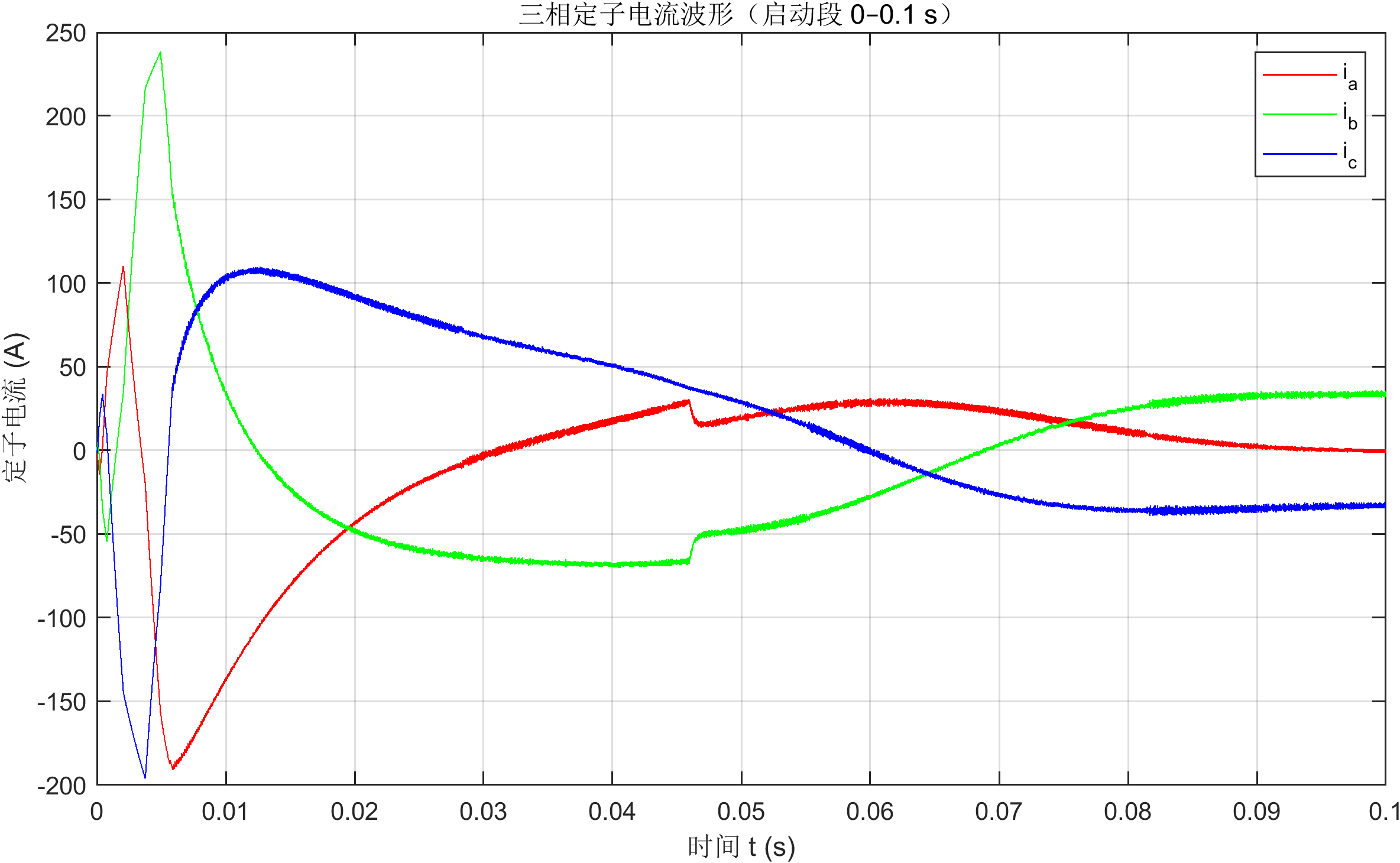
3.3 三相定子电流
三相对称、相位严格相差 120°,基波幅值约 50 A,波形质量良好,开关纹波小,验证坐标变换与磁链定向正确有效。
3.4 多工况性能对比
核心性能汇总:
-
动态响应
- 低速上升时间:7.45 ms(最快)
- 额定上升时间:44.8 ms
- 高速上升时间:62.01 ms
- 反转跨零(±50→∓50 r/min):16.6 ms
-
抗扰性能负载突卸(80→20 N・m):
- 最大转速偏差:约 150 r/min
- 恢复时间:约 50 ms
- 稳态误差:1.72 r/min
-
转矩纹波五组工况稳态转矩标准差:1.80~2.10 N·m峰峰值:7.96~10.34 N・m低速脉动略高,符合 DTC 固有特性。
4 讨论
4.1 DTC 优势
- 转矩响应极快:全工况上升时间 < 65 ms,反转跨零仅 16.6 ms
- 磁链跟踪精度极高:相对误差 < 0.02%,鲁棒性强
- 结构简洁:无旋转变换、无电流解耦,工程易实现
4.2 DTC 固有不足
- 转矩脉动明显:峰峰值约为额定转矩 13%~17%
- 低速性能受限:电压模型积分漂移导致磁链估算精度下降
- 开关频率不固定:谐波分布较宽
4.3 后续改进方向
- 采用 SVPWM 替代开关表,减小转矩脉动
- 构建 电压模型 + 电流模型混合磁链观测器,提升低速性能
- 引入 模型预测控制(MPC) 实现最优电压矢量序列选择本文参数化框架可直接作为各类改进算法的基准对照平台。
5 结论
本文完成基于 Simulink 的异步电机直接转矩控制系统建模与多工况验证,主要结论如下:
- 成功搭建六扇区开关表 DTC 完整仿真模型,重构模块消除兼容性警告,仿真效率显著提升;
- 定子磁链跟踪误差 **< 0.02%,转矩动态响应< 65 ms**,转矩纹波稳定可控;
- 在低速、额定、高速、反转、负载突卸全工况下系统稳定、鲁棒性强、动态性能优异;
- 模型标准化、参数化、可复现,可作为后续先进控制算法研究的统一基准平台。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 9
9 0
0- 0



 已为社区贡献25条内容
已为社区贡献25条内容

所有评论(0)