Qwen3 VL揭秘:视觉信息如何无缝融入语言模型的深度解析!
本文梳理了Qwen3 VL视觉信息进入语言模型的关键路径:编码、压缩、拼接、跨层注入与位置编码。重点分析数据操作过程,比较图像与视频分支在建模上的差异,并说明DeepStack与RoPE/M-RoPE在多模态对齐中的作用,帮助读者对Qwen3 VL有个整体了解。
1
模型结构概览
Qwen3-VL是Qwen系列新一代视觉-语言模型,面向图文理解、视频理解、多模态推理与智能体交互等场景。 官方形态同时覆盖Dense与MoE,并提供Instruct/Thinking等版本,支持从边缘端到云端的灵活部署。以Qwen3-VL-32B-Instruct和Qwen3-VL-235B-A22B-Instruct为例来了解模型主体结构。
1.1 Qwen3-VL-32B-Instruct
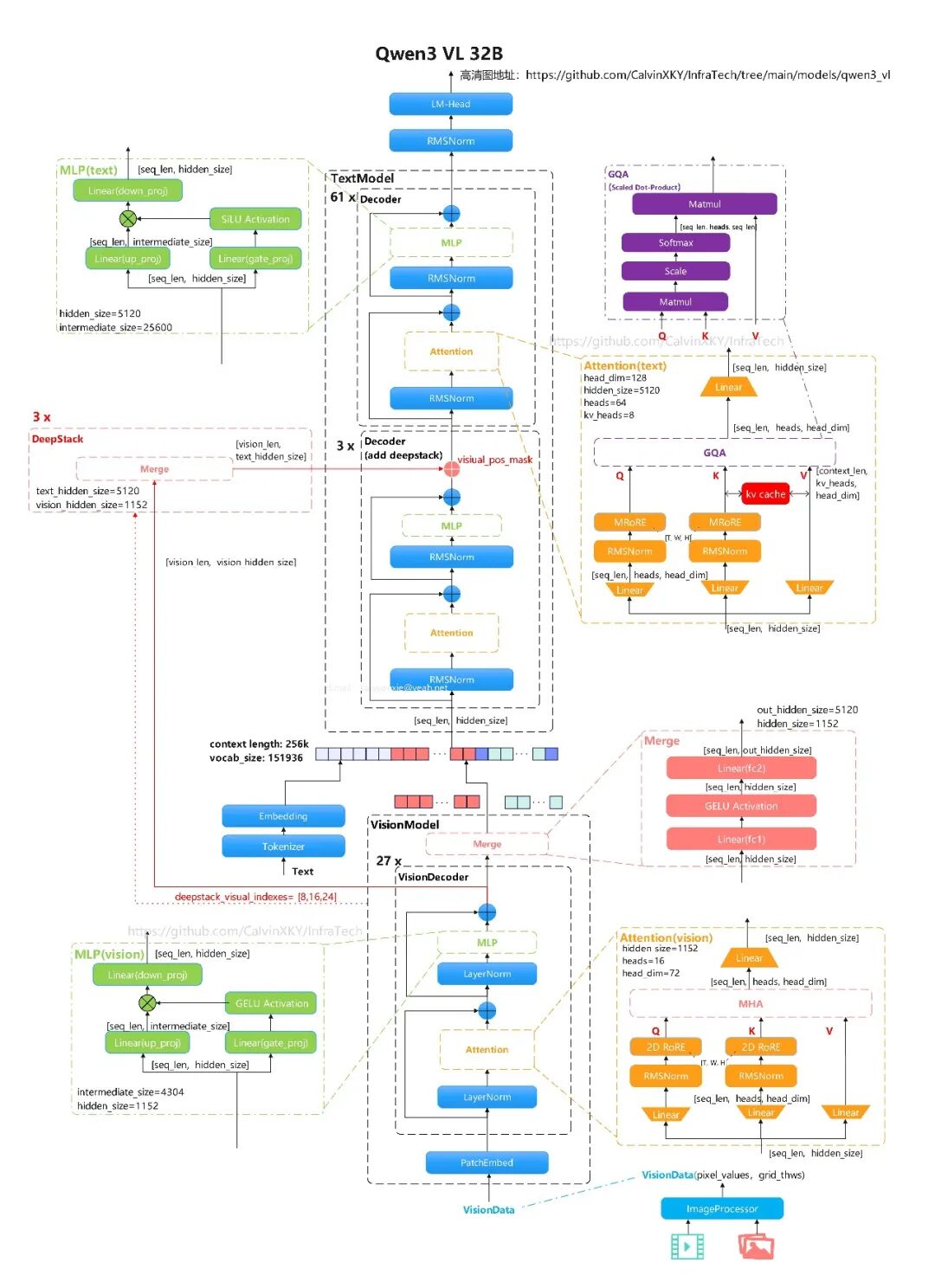
高清图:
https://github.com/CalvinXKY/InfraTech/tree/main/models/qwen3_vl
模型结构描述:
-
类型:视觉-语言指令模型(Instruct)
-
架构:
Qwen3VLForConditionalGeneration
-
模型类型:qwen3_vl
-
参数规模:32B(以模型命名为准)
-
文本上下文长度:262144
-
文本层数:64
-
文本隐藏维度:5120
-
文本FFN中间层维度:25600
-
文本注意力头数:Q=64,KV=8,head_dim=128
-
文本词表大小:151936
-
RoPE参数:rope_theta=5000000,mrope_section=[24,20,20]
-
视觉编码器层数:27
-
视觉隐藏维度:1152
-
视觉头数:16
-
视觉FFN中间层维度:4304
-
图像Patch大小:16,时序Patch大小:2
-
视觉输出映射维度:5120(与文本隐藏维度对齐)
1.2 Qwen3-VL-235B-A22B-Instruct
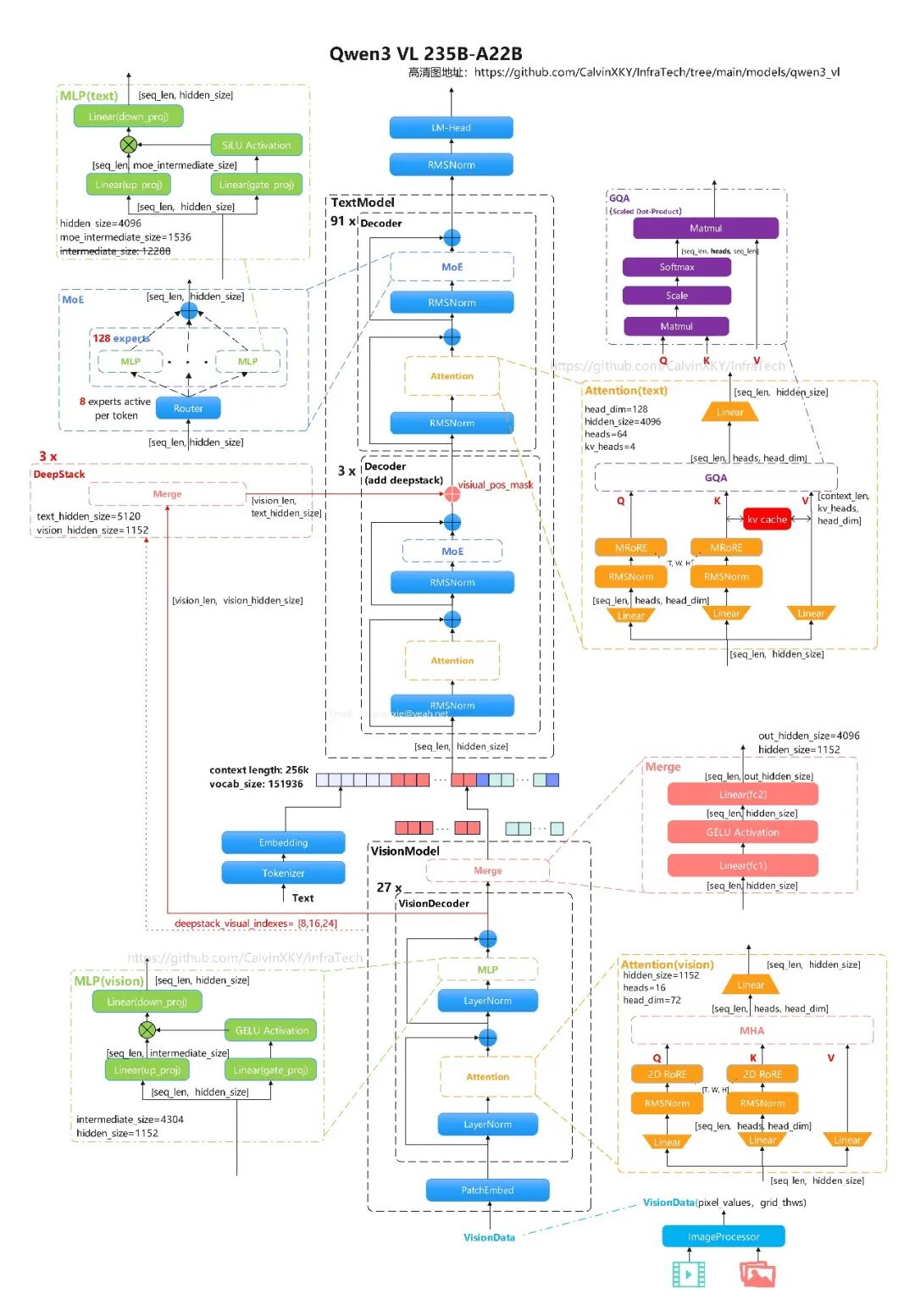
高清图:https://github.com/CalvinXKY/InfraTech/tree/main/models/qwen3_vl
模型结构描述:
-
类型:视觉-语言指令模型(Instruct)
-
架构:
Qwen3VLMoeForConditionalGeneration
-
模型类型:qwen3_vl_moe
-
参数规模:235B,激活参数22B(以模型命名为准)
-
文本上下文长度:262144
-
文本层数:94
-
文本隐藏维度:4096
-
文本FFN中间层维度:12288
-
文本注意力头数:Q=64,KV=8,head_dim=128
-
文本词表大小:151936;专家总数128,每token激活专家数8,
moe\_intermediate\_size=1536 -
RoPE参数:rope_theta=5000000,mrope_section=[24,20,20]
-
视觉编码器层数:27
-
视觉隐藏维度:1152
-
视觉头数:16
-
视觉FFN中间层维度:4304
-
图像Patch大小:16,时序Patch大小:2
-
视觉输出映射维度:4096(与文本隐藏维度对齐)
2
图片到tokens的编码过程
视觉图片类数据在进入语言模型前,需要先转化为tokens序列。不同尺寸的图片经过视觉编码器(Vision Encoder)后,得到的tokens长度通常不同。 在Qwen3VL的技术报告中,有几张示意图展示了常见场景,例如H×W=32×256这种宽高比较大的图片。 这些图片最终会映射为不同长度的tokens。
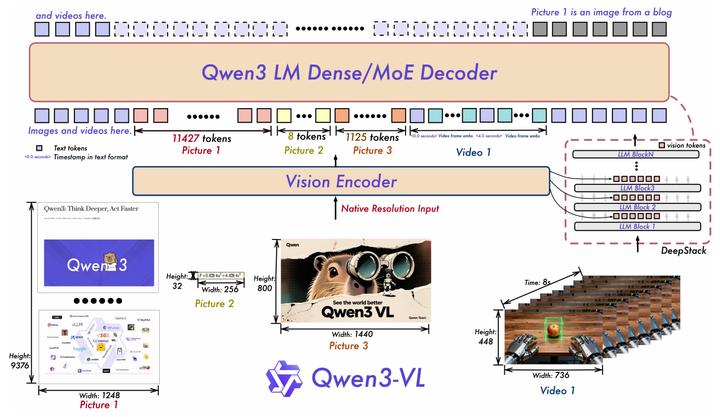
图像数据如何与tokens序列对应?编码过程一般包含网格分块与压缩两步。网格分块用于重排图像数据,压缩用于降低序列长度。
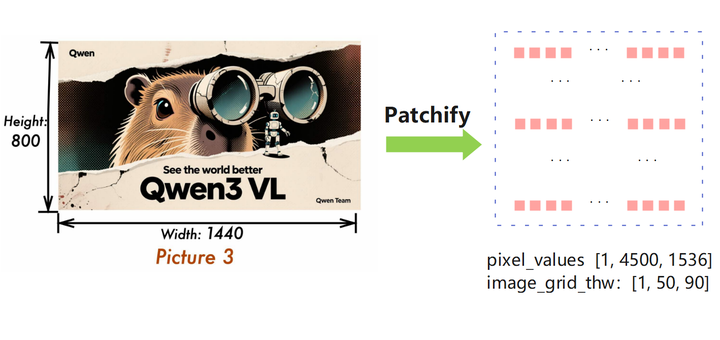
2.1 图片patch化
下面以Height=800、Width=1440的图片为例,输入形状为[800, 1440, 3]。 在Qwen3VL中,相关patch参数如下:
- patch_size=16,图片块的高宽;
- temporal_patch_size=2,时间维度块大小(主要用于视频);
- in_channels=3,图片通道数;
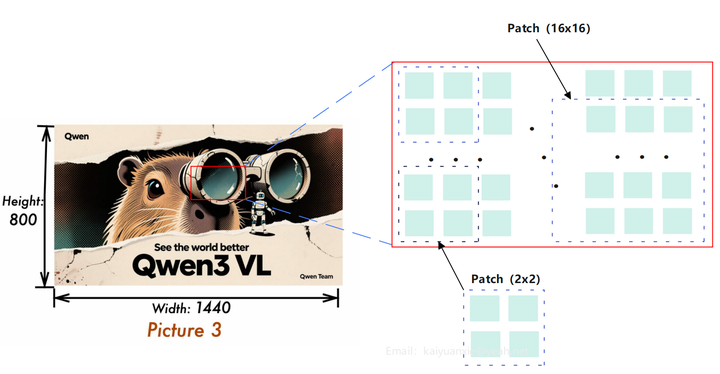
对图片进行网格化处理(时间维度会补齐到2,再除以temporal_patch_size):
- grid_t = 2⁄2 = 1
- grid_h = 800⁄16 = 50
- grid_w = 1440⁄16 = 90
进入VisionEncoder前的序列长度:
L_pre = grid_t * grid_h * grid_w = 1*50*90 = 4500
每个patch向量维度:
D = 3*2*16*16 = 1536
得到数据:
- pixel_values 形状:[1, 4500, 1536]
- image_grid_thw:[1, 50, 90]
最后一个维度的变化与映射方式相关:进入VisionEncoder后会先经过PatchEmbed处理,末端再经过Merger映射运算。
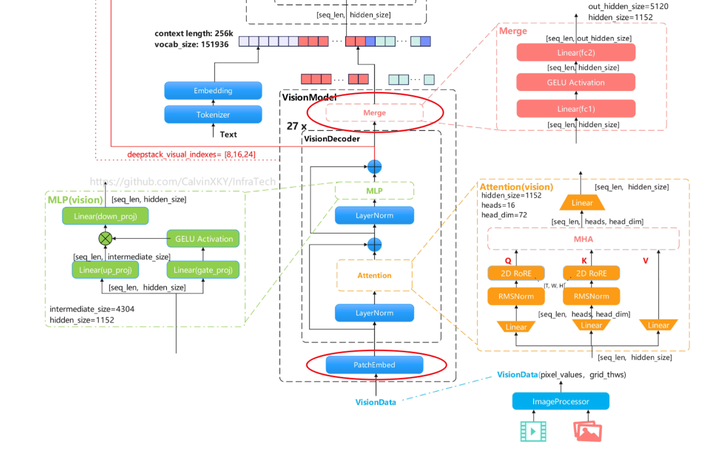
2.2 PatchEmbed/Merger处理
最后一个维度的变化与映射方式相关:进入VisionEncoder后会先经过PatchEmbed处理,末端再经过Merger映射运算。
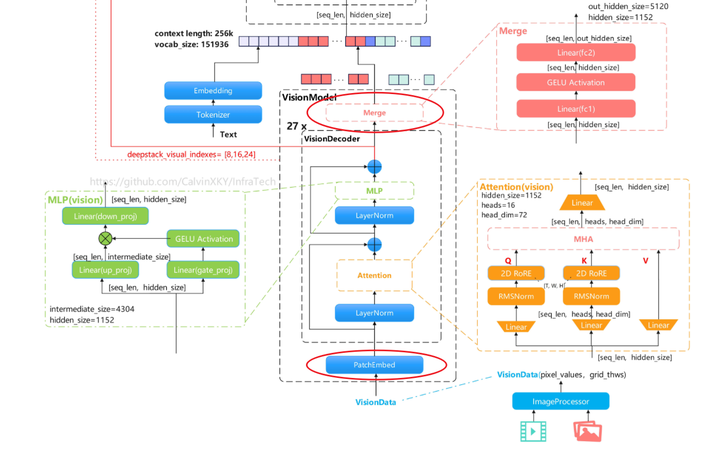
PatchEmbed处理
PatchEmbed包含一个3D卷积映射(Conv3d),将维度从1536映射到hidden_size,因此pixel_values形状变为[1, 4500, 1152]。
示例代码如下:
class Qwen3VLVisionPatchEmbed(nn.Module):
def __init__(self, config) -> None:
super().__init__()
self.patch_size = config.patch_size
self.temporal_patch_size = config.temporal_patch_size
self.in_channels = config.in_channels
self.embed_dim = config.hidden_size
kernel_size = [self.temporal_patch_size, self.patch_size, self.patch_size]
self.proj = nn.Conv3d(self.in_channels, self.embed_dim, kernel_size=kernel_size, stride=kernel_size, bias=True)
def forward(self, hidden_states: torch.Tensor) -> torch.Tensor:
target_dtype = self.proj.weight.dtype
hidden_states = hidden_states.view(
-1, self.in_channels, self.temporal_patch_size, self.patch_size, self.patch_size
)
hidden_states = self.proj(hidden_states.to(dtype=target_dtype)).view(-1, self.embed_dim)
return hidden_states
Merger处理
Merger计算中会压缩序列长度。相关配置:
- spatial_merge_size=2,视觉压缩(融合)尺寸。
- out_hidden_size=5120,语言模型的hidden维度大小。模型规模不同时,该参数会变化。
class Qwen3VLVisionPatchMerger(nn.Module):
def __init__(self, config: Qwen3VLVisionConfig, use_postshuffle_norm=False) -> None:
super().__init__()
self.hidden_size = config.hidden_size * (config.spatial_merge_size**2)
self.use_postshuffle_norm = use_postshuffle_norm
self.norm = nn.LayerNorm(self.hidden_size if use_postshuffle_norm else config.hidden_size, eps=1e-6)
self.linear_fc1 = nn.Linear(self.hidden_size, self.hidden_size)
self.act_fn = nn.GELU()
self.linear_fc2 = nn.Linear(self.hidden_size, config.out_hidden_size)
def forward(self, x: torch.Tensor) -> torch.Tensor:
x = self.norm(x.view(-1, self.hidden_size) if self.use_postshuffle_norm else x).view(-1, self.hidden_size)
x = self.linear_fc2(self.act_fn(self.linear_fc1(x)))
return x
在最后的Merger计算时(self.use_postshuffle_norm=True),输入x会先调整形状:x.view(-1, self.hidden_size),其中:
self.hidden_size = config.hidden_size * (spatial_merge_size**2)。
所以,压缩后的序列计算方式:
L_final = L_pre / ((spatial_merge_size**2) = 4500 / 4 = 1125
得到输出的序列长度与嵌入维度的shape=[1125, 5120]
3
视频数据的编码过程
视频数据与图片数据的主要差异在于增加了时间维度。视频会先抽帧降低数据量,再进行时序patch划分。 以Qwen3VL示意图中的视频为例:分辨率H=448、W=736,时长8秒。
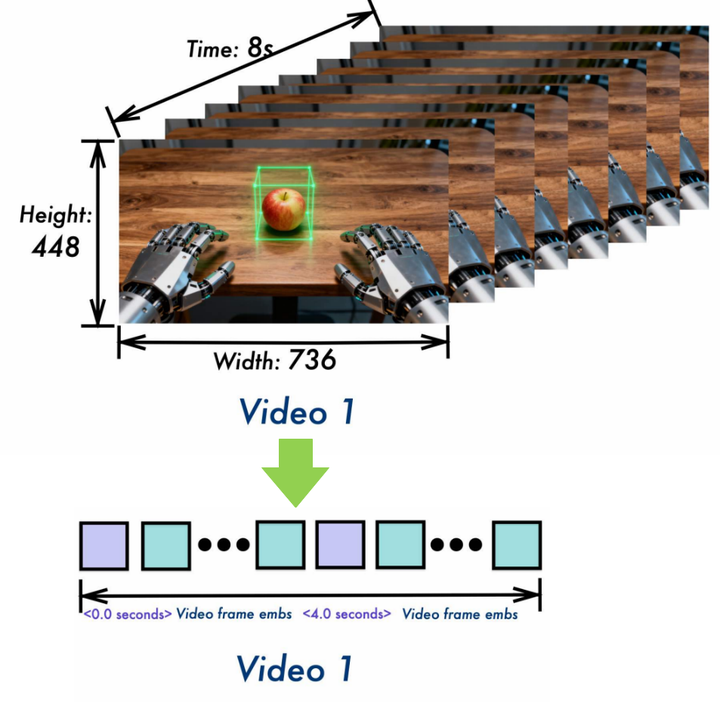
默认参数配置:
- fps=2
- temporal_patch_size=2
- patch_size=16
- merge_size=2
计算过程:
- 采样帧数:num_frames ≈ 8 * 2 = 16
- 时间网格:grid_t = 16 / 2 = 8
空间网格:
- grid_h = 448 / 16 = 28
- grid_w = 736 / 16 = 46
得到数据:
- pixel_values 形状:[1, 10304, 1536]
- image_grid_thw:[[8, 28, 46]]
- L_pre = grid_t * grid_h * grid_w = 10304
与图片流程相同,视频也需要经过PatchEmbed和Merger处理,最终得到:
shape=[2576, 5120]
4
数据的拼接
文本、图片、视频tokens最终会一起送入LLM处理,因此需要拼接。其做法是:先在输入构造阶段通过placeholder预留图片/视频tokens位置,再在视觉分支计算完成后回填拼接。

其中,图片/视频数据会引入一些额外tokens。继续以上面的视频为例,上一步得到的视觉序列长度为2576。实际构造输入时,每个grid_t都会拼接一段:
每一段分为四块:
- ”<{curr_time:.1f} seconds>“(文本,会被分词成若干 token)时间戳文本
- vision_start_token
- 一段视频placeholder,本例中长度为:2576/8 = 322
- vision_end_token
所以总长度上,除了2576个视觉占位外,还会额外增加:vision_start/end共2*grid_t=16个特殊token,以及8段时间戳文本(会进一步分词)。
5
DeepStack操作
DeepStack原理:不把所有视觉token都“横向串成一长串”塞进LLM输入,而是把额外的高分辨率视觉token按层“纵向堆叠”, 分配到LLM的多个早期/中期层里,用残差方式逐层注入,从而在不显著增加上下文长度的前提下,让模型有效处理更多视觉细节。 DeepStack在保留更多视觉信息的同时,能够有效控制上下文长度。
Qwen3VL使用了DeepStack技术:在vision encoder中,从指定层(deepstack_visual_indexes)取出hidden_states,并分别经过deepstack_merger, 将空间merge后的视觉特征整理到可注入语言模型的维度。Qwen3VL配置中指定了[8, 16, 24]层。
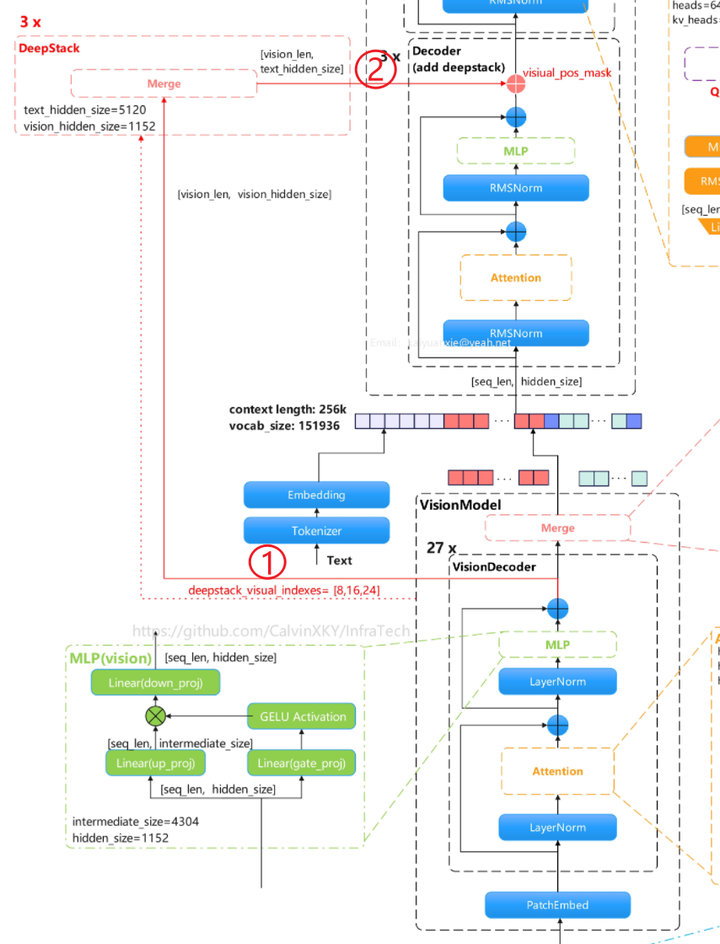
操作过程:
- vision decoder中间层特征(多尺度/不同语义深度)先各自经过merger,得到deepstack_features;
- 这些特征后续会在文本模型前几层按视觉位置加回(_deepstack_process)。
注意:VisionDecoder最后一层的Merger与DeepStack分支中的Merger存在差异:最后一层Merger的LayerNorm位置不同,且需要进行尺寸压缩。
6
位置编码的处理
在Qwen3VL中,位置编码采用RoPE(Rotary Position Embedding),但视觉与文本在位置ID构造上存在差异: 视觉分支通常使用2D/3D坐标构造位置;在多模态统一建模时,会通过M-RoPE(Multimodal Rotary Position Embedding)把t/h/w信息映射到不同通道分组。 其核心差异主要体现在嵌入维度(head_dim)分量的分配方式与位置索引的组织方式上。
6.1 视觉塔中的2D编码
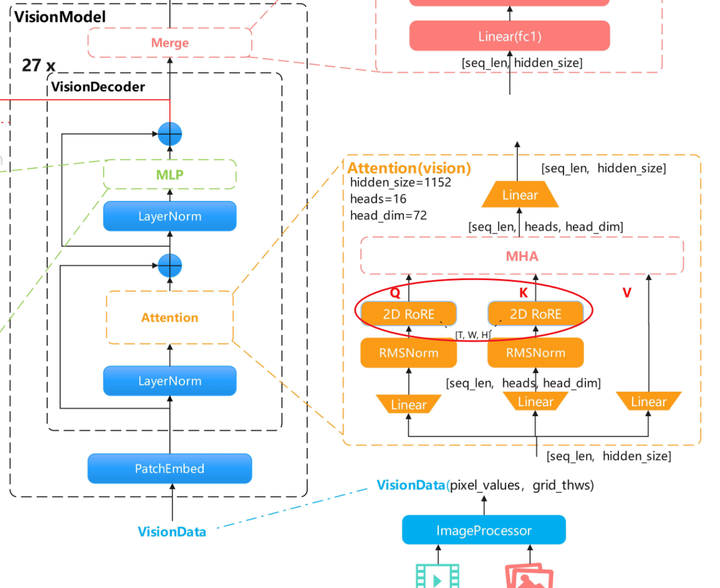
对图片数据而言,每个token有二维索引(h, w),对应视觉塔中的row/col;若head_dim=128,其分频逻辑是:
- 128先分为64对二维向量构成独立的平面;
- 前32对的频率分量由row索引决定,后32对的频率分量由col索引决定。
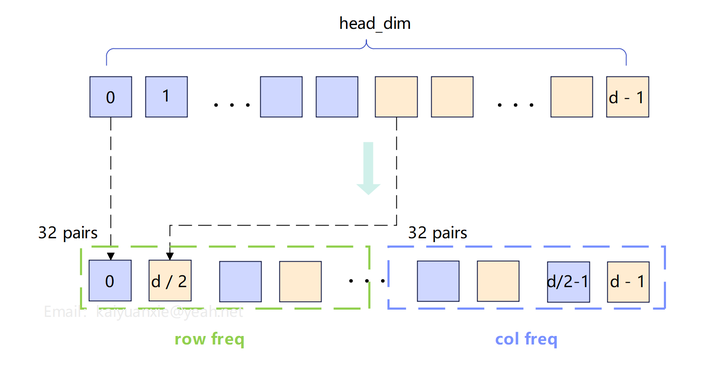
更具体一点,每个维度的归属如下:
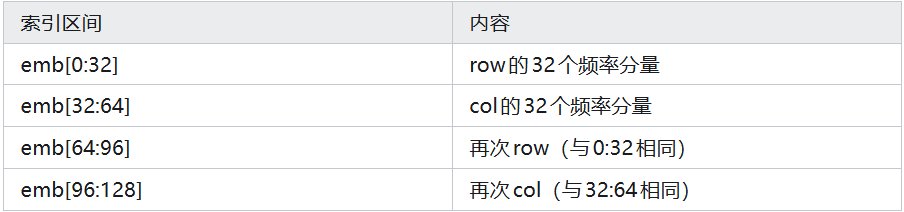
然后cos = emb.cos(),sin = emb.sin(),形状都是(seq_len, 128)。规律:
- 前32个旋转对(覆盖q[0:32]与q[64:96])由行坐标 𝑟 决定相位。
- 后32个旋转对(覆盖q[32:64]与q[96:128])由列坐标 𝑐 决定相位。
其中𝑟与𝑐由token在图片中的行列位置决定。row与col共用freqs;max_len通常取max(R,C),其中R、C分别为row与col方向的最大索引。
6.2 文本模型的M-RoPE
视觉3D位置编码是在2D位置编码的基础上,进一步引入了时间维度。在M-RoPE中,有三个独立的角度:
- 时间维度角度:angle_t = t * theta_i
- 高度维度角度:angle_h = h * theta_i
- 宽度维度角度:angle_w = w * theta_i
Qwen3 VL采用了Interleaved-MRoPE,其核心思想如下:
在1D RoPE中,嵌入层分成了d/2组,每一对连续元素(x[2j], x[2j+1])视为一个二维子空间,j = 0, 1, …, d/2 - 1。
确定第𝑗个子空间应使用t、h、w中的哪一个轴进行旋转采用轮询(Round‑Robin)分配:
axis(𝑗)=𝑗mod3
其中定义映射:0→t,1→h,2→w。因此:
- 当j % 3 == 0时:该子空间用t轴的旋转角度angle = t * θ_j
- 当j % 3 == 1时:该子空间用h轴的旋转角度angle = h * θ_j
- 当j % 3 == 2时:该子空间用w轴的旋转角度angle = w * θ_j
这种方式将时间、高度、宽度三个维度的信息交错融入整个特征空间,从而使多模态模型能更全面、更高效地理解数据中的复杂时空结构。
最后唠两句
为什么AI大模型成为越来越多程序员转行就业、升职加薪的首选
很简单,这些岗位缺人且高薪
智联招聘的最新数据给出了最直观的印证:2025年2月,AI领域求职人数同比增幅突破200% ,远超其他行业平均水平;整个人工智能行业的求职增速达到33.4%,位居各行业榜首,其中人工智能工程师岗位的求职热度更是飙升69.6%。
AI产业的快速扩张,也让人才供需矛盾愈发突出。麦肯锡报告明确预测,到2030年中国AI专业人才需求将达600万人,人才缺口可能高达400万人,这一缺口不仅存在于核心技术领域,更蔓延至产业应用的各个环节。
那0基础普通人如何学习大模型 ?
深耕科技一线十二载,亲历技术浪潮变迁。我见证那些率先拥抱AI的同行,如何建立起效率与薪资的代际优势。如今,我将积累的大模型面试真题、独家资料、技术报告与实战路线系统整理,分享于此,为你扫清学习困惑,共赴AI时代新程。
我整理出这套 AI 大模型突围资料包【允许白嫖】:
- ✅从入门到精通的全套视频教程
- ✅AI大模型学习路线图(0基础到项目实战仅需90天)
- ✅大模型书籍与技术文档PDF
- ✅各大厂大模型面试题目详解
- ✅640套AI大模型报告合集
- ✅大模型入门实战训练
这份完整版的大模型 AI 学习和面试资料已经上传CSDN,朋友们如果需要可以微信扫描下方CSDN官方认证二维码免费领取【保证100%免费】

①从入门到精通的全套视频教程
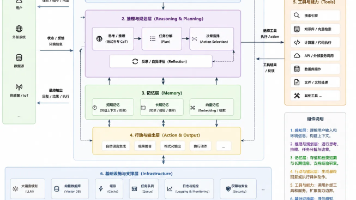
包含提示词工程、RAG、Agent等技术点
② AI大模型学习路线图(0基础到项目实战仅需90天)
全过程AI大模型学习路线

③学习电子书籍和技术文档
市面上的大模型书籍确实太多了,这些是我精选出来的

④各大厂大模型面试题目详解

⑤640套AI大模型报告合集

⑥大模型入门实战训练
如果说你是以下人群中的其中一类,都可以来智泊AI学习人工智能,找到高薪工作,一次小小的“投资”换来的是终身受益!
应届毕业生:无工作经验但想要系统学习AI大模型技术,期待通过实战项目掌握核心技术。
零基础转型:非技术背景但关注AI应用场景,计划通过低代码工具实现“AI+行业”跨界。
业务赋能 突破瓶颈:传统开发者(Java/前端等)学习Transformer架构与LangChain框架,向AI全栈工程师转型。
👉获取方式:
有需要的小伙伴,可以保存图片到wx扫描二v码免费领取【保证100%免费】🆓


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 8
8 0
0- 0



 已为社区贡献130条内容
已为社区贡献130条内容

所有评论(0)