尾翼的作用和研究现状
一 《Stability and Controller Research of Double-Wing FMAV System Based on Controllable Tail》
研究鸟类的飞行过程发现发现 , biomimetic tail surfaces 可以增强 damping effects. 用到样机上可能使其实现passive stability.
机身下加尾,可能让飞行器成为动稳定的:Some researchers have successfully developed passive stable FMAV prototypes based on stabilizing sails.
实际上,无尾翼也有好处:尾翼通常比较大,导致更容易受到airflow disturbances的影响. 而tailless FW-MAVs inspired by insects [26], [27], [28], [29], [30], rely on wings flapping to generate flight forces and control moments synchronously. 无尾飞行器也能悬停,并展现出exceptional maneuverability, precise landings. (来源:A Multi-Modal Tailless Flapping-Wing Robot Capable of Flying, Crawling, Self-Righting and Horizontal Take-Off)
无尾翼悬停样机的局限:多用于悬停,能耗高且是动不稳定的。只有少数无尾飞行器能free flight with long endurance. 如何extend the flight duration of these vehicles remain challenging(能“用”更久还是挑战。所以就引出自己的研究).
悬停时,尾巴可能产生气动力矩的众多研究:Thomas 发现鸟类在悬停时open and tilt their tails to one side,暗示the airflow generated by flapping induces 尾附近的速度和动压,可以被尾用于产生控制力矩[7].Altartouri et al. 也认可了扑动诱导的速度对尾的影响 [10]. Armanini et al. 实验证实了翼-尾的干扰,展现了在扑翼的干扰下尾翼附近的复杂气动特征[12].Qian et al. 复现了该实验,并通过控制尾的偏角产生了明显的俯仰力矩[13]. Liang et al. 通过调整尾的swing angle建立了反馈控制,实现悬停[14,15]. Wang et al. 试验研究了改变扑动频率对翼-尾干扰效应的影响,并确定了尾的最佳安装位置。另外建立了尾的气动模型并通过仿真设计控制律,成功应用在样机上[14,15].(别人这里模型也建了,控制也设计了。14 15比本文可能更好)
重要观点:建立尾翼模型时,需要试验,而非依赖复杂的仿真或过于简化的理论模型。It is evident from these analyses that experimental investigations are essential for understanding the influence of flapping-induced flow on the tail. Therefore, examining the interaction between flapping-induced flow and the tail under 不同的tail installation positions, 尾的面积, and 尾的倾斜角is necessary to establish effective tail and aircraft models, facilitating the subsequent design of an efficient controller.
Experimental testing was conducted to determine the control moment induced by the tail due to the induced flow, fitting the relationship between tail control moment and tail area, installation position, and swing angle.
尾翼面积设计的参考:尾翼大小的设计,借鉴了红宝石蜂鸟尾羽展开时的翼-尾比例特征。
把Wang等人文献提到过的核心信息。
《Modeling the Bio-Inspired Wing-Tail Interaction Mechanism and Applying It in Flapping Wing Aircraft Pitch Control》,作者:Liang Wang , Wuyao Jiang, Zeyan Wu
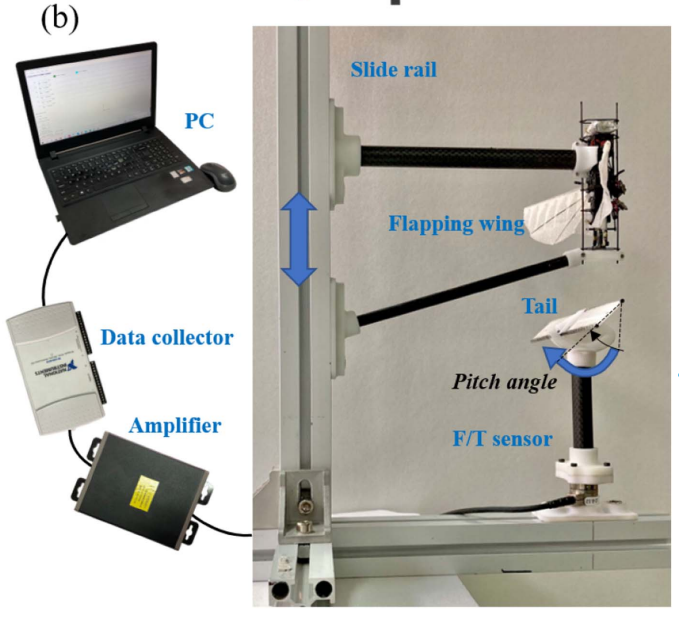
2. 设计的试验组
3. 尾的基本气动模型(理论公式)
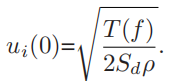
(1)紧贴翼下方的诱导速度ui(0):
(2)一定距离s后的诱导速度ui(s):
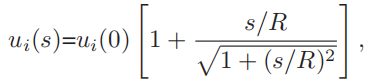
其中R是螺旋桨的半径,也相当于扑翼飞行器的单翼长度;s是距离。
这个公式来源是McCormick et al. [31] 推导的induced flow behind propeller的分布律。可能也是理想情况下,不考虑耗散。根据这个公式可见,越往下,越加速。当s→∞时,ui(s)=2ui(0)。解释了(1)的来源。虽然获得(1)的动量定理表达还不太懂。回顾之前的论文理解了:
Tf=恒定的流量*(后方无穷远处的速度-开头处无穷远的速度)
![]()
在上式中,2ui(0)是螺旋桨诱导的速度加速后,在无穷远处的速度大小(理想情况下)。至于为什么螺旋桨后方的ui(s)呈现那种变化,暂时不清楚。所以这个2ui(0)可能不是那么准确。
Sd相当于是桨盘的面积,ui(0)是桨盘平面处的诱导速度。
因此式子的含义:是流量,
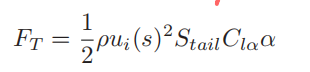
是后方无穷远的速度,0是前方未受扰动时的速度。(3)尾产生的“升力”(沿着侧向的)
![]()
在这里,升力系数CL与尾迎角的关系还是线性表达的。CL_alpha的表达式来自空气动力学,可能有点问题。AR是展弦比,\tao是根梢比?
![]()
(4)尾产生的控制力矩N
![]()
其中x2是翼的压力中心和全机重心的距离。用传感器测量的时候,要注意直接测到的力矩,取矩点是传感器而不是全机的重心。
为什么说力矩导数和f相关,主要是诱导速度ui决定的。升力越大,自然ui就越大。
4. 其他重要结论(提醒)
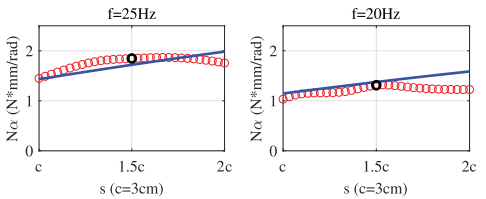
(1)理论值和试验的对比,误差来源。
如果用理论值,似乎布置得越靠下,关于alpha的力矩导数就越大。原因是:理论那里假设了整个翼都浸没在尾流中。而且ui的求解也是理论公式,越靠下越大。
本文解释的误差原因是,实际上诱导速度会“spread outward”(是不是指的是在远后方,气流不再是收缩的,而是扩散的了),而且“velocity would decrease after being accelerated to a certain value”. 因此,并非越靠下布置,力矩导数越大。
(2)Wang 等人还是采用理论模型,只是通过试验明确了理论模型的适用范围。
认为理论模型存在以下几个问题:
a. 求的ui(0)公式本身不一定准确,依赖于无穷远处的诱导速度大小为2ui(0)这个前提。
b. 求的诱导速度分布规律ui(s)。是不是比较理想化?
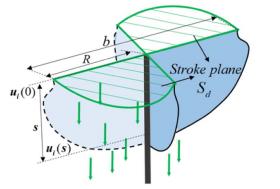
c. 诱导气流ui(s)对翼的覆盖程度。需要根据ui(s),求出Ri(s)。看看和尾的作用面积。
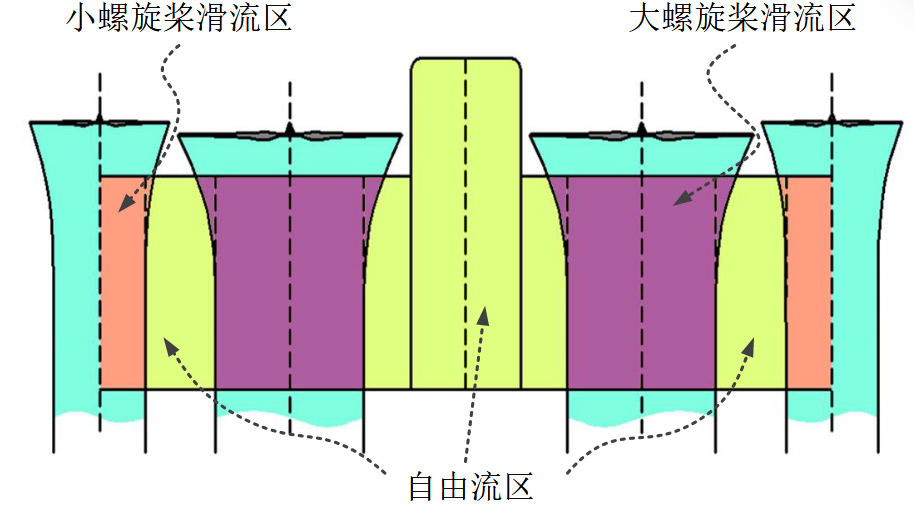
b的可能假设是:在螺旋桨之后,气流是先收缩、后扩散的(滑流)一般地,螺旋桨的滑流区可分为近场区和远场区[105-106],对于 THUTS005 尾坐式无人机,由于机翼与螺旋桨相距较近,本文假设机翼全部处于螺旋桨滑流的近场区,即只考虑螺旋桨滑流的收缩效应而不考虑扩散效应。
c的依据:“面积”沿下方的变化公式。理想情况下只要知道速度的变化,且假设不向外耗散,就得到面积变化
相应的螺旋桨滑流区半径为(根据质量守恒就得到了):
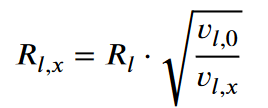
所以,尾翼气动力和力矩的理论公式如下:
![]()
需要明确理论公式的哪些地方作为结构保留,哪些量用实验来确定(拟合)。得属于我的公式。
关键量包括:ui(s),S_tail(且为有效面积),Cl_alpha,alpha,x2 这5个。
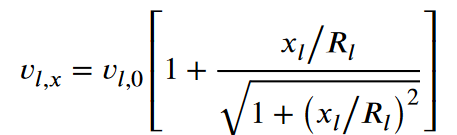
(1)ui(s)表达式如下,依赖公式结构本身的可信性。也和扑动力的大小有关。需要明确其依赖什么假设,如果认为可以接受,就认为其表达式是给定的,就能和频率f、幅度Phi等建立关系。
(2)另外,有来流的时候,诱导速度的表达式是否会改变(应当不会)。有疑问,有来流时,翼后的速度究竟是怎样的,是简单的来流+诱导速度,还是来流速度被翼遮住了,只剩小诱导速度?
![]()
(3)S_tail,也得看尾巴的大小,有多少能受到扑翼尾流的影响。是好的还是和坏的影响(这个疑问,可以参考清华-杨的博士论文。推测:影响好坏,是不是和诱导速度相对来流速度的大小也有关系?)。
(4)x2是尾巴的压心(气动合力作用点)到全机质心的距离,太确定,可以通过试验估算。也就是需要拟合得到的参数。通过试验或者理论,把它替换成一个具体的数。
(5)Cl_alpha将就着用这个公式。就当它是有表达式的。
(6)迎角alpha没问题。其值是可操纵的,不需要拟合求。
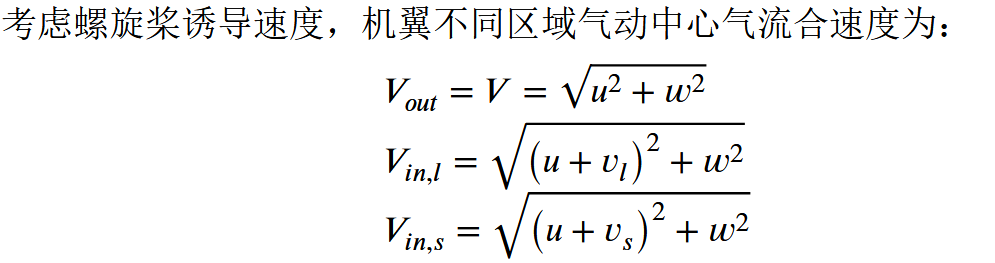
其中,Vout 为自由流区气流合速度,Vin,l 为大螺旋桨滑流区气流合速度,u 为自由流速度在机体坐标系 xb 轴的分量,w 为自由流速度在机体坐标系 zb 轴的分量,vl 为大螺旋桨诱导速度。
诱导速度,或者螺旋桨滑流,起到的作用是:由螺旋桨滑流增强的舵效提供姿态控制力矩。
同时也应该注意,来流和螺旋桨滑流的耦合使得其动力学特性具有很强的非线性和未知不确定性,集中体现在气动特性的急剧改变、耦合程度的显著增加、外界阵风的随机干扰等方面。
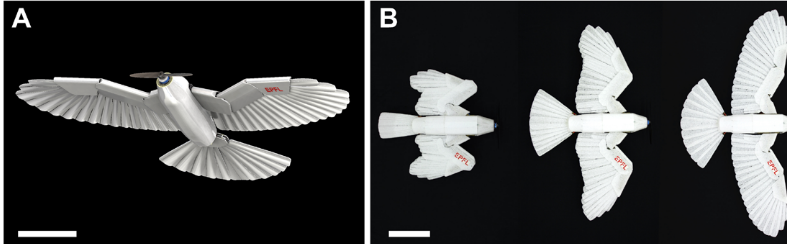
三《A twist of the tail in turning maneuvers of bird-inspired drones》
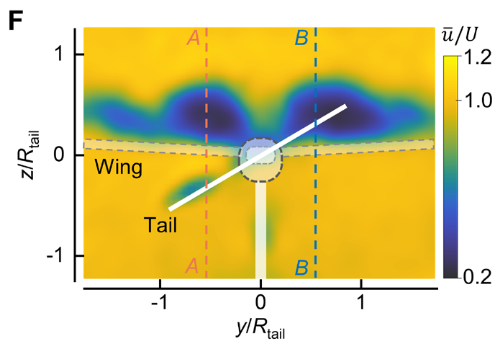
有问题:扑动产生的尾流,原来对尾巴并不好吗?在高速飞行的时候,扑翼的后方反而是低速区。如果尾巴来到那个位置,气动力就会降低:高速气流可视化揭示了其中奥秘。机翼飞行时会在后方产生一片低速的尾流区。当尾翼扭转时,抬起的一侧(如B点)恰好伸入了这片低速尾流区,导致其升力急剧下降;而下降的另一侧(如A点)则仍然暴露在高速气流中,升力保持不变。正是尾翼两侧巨大的升力差,产生了驱动机身滚转的强大力矩。
注意在别人的试验条件中,measurement was conducted at an inflow velocity of Uref = 7 m/s with an angle of attack of α = 16°. 也就是说,可能来流速度比较大,而扑动诱导的速度相对小(扑动幅度,扑动频率 还不知道),而且它们的关系不是简单的相加
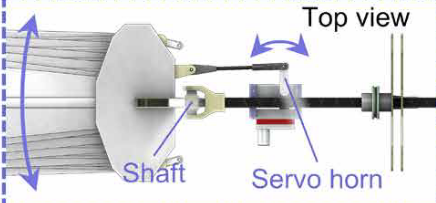
这篇文章是发表在robotics上的,最大的价值是尾的设计、实验装置等。
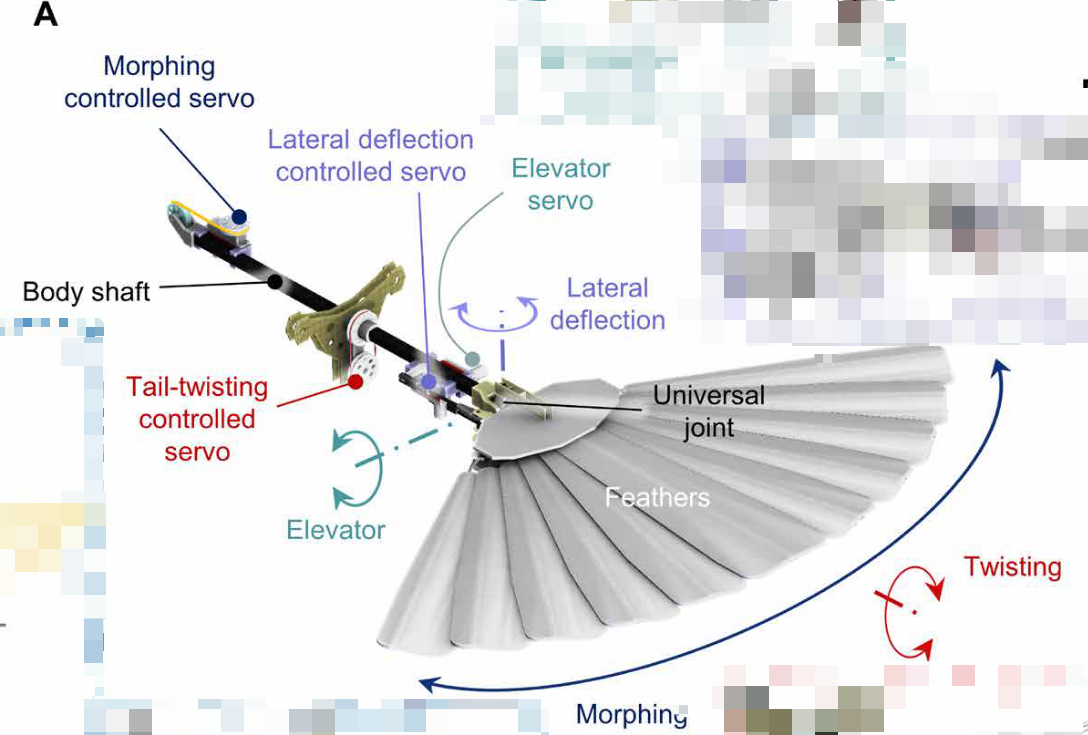
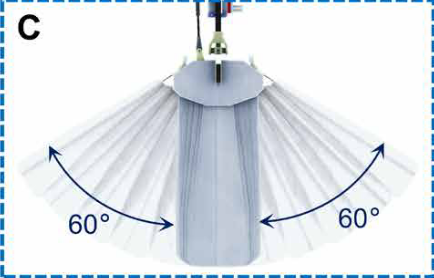
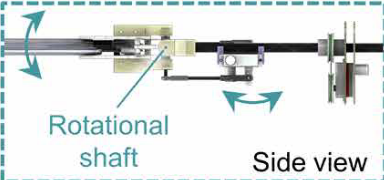
1. 好奇,尾巴的展开、扭转是通过什么控制的,几个舵机?
2.
此外,还介绍了风洞试验的情况,放在这篇博客里了:
附录
1. 动量定理,回顾和理解(分别以涵道风扇和螺旋桨为例)
涵道的例子
气流 (无穷远场,处于涵道相对速度为 Vc) 由涵道入口上部吸入涵道
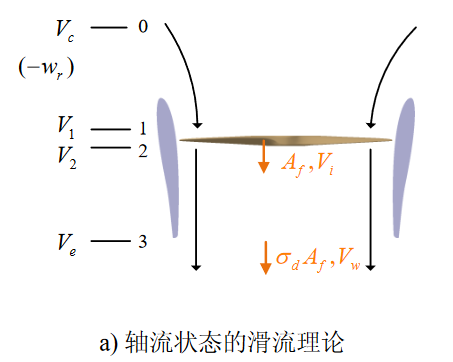
截面1,2分别是风扇的上、下表面。根据气体物理特性,其速度连续不可突变, 则有:
V1=V2=Vc+Vi;Ve=Vc+Vw
动量定理(完全不受扰的出口处-刚开始受扰的入口处;流量可以用任意一处的来表示,这里用的是风扇处的流量):
![]()
另一个螺旋桨的例子(也相似的)

这里面V∞+vi0才是桨盘平面处的合速度,所以中间这个是表示流量。在前无穷远处的速度大小是V∞,在后无穷远处的速度是V∞+2vi(0)。相减就剩下2vi(0)。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 8
8 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)