结构动力学仿真-主题062-结构动力学模型修正
主题062:结构动力学模型修正
1. 概述
1.1 模型修正的意义
结构动力学模型修正是指利用实测的模态参数(固有频率、阻尼比、模态振型)或响应数据,通过数学方法调整有限元模型的物理参数(质量、刚度、阻尼),使模型预测结果与实测数据一致的过程。模型修正是连接理论模型与实际结构的重要桥梁。
模型修正的主要目标:
- 提高模型精度:使有限元模型更准确地反映实际结构的动力学特性
- 损伤识别:通过模型参数变化识别结构损伤位置和程度
- 响应预测:基于修正后的模型进行更准确的动态响应预测
- 优化设计:为结构优化设计提供准确的分析模型






1.2 模型修正的基本原理
模型修正问题可以表述为优化问题:
minpJ(p)=∥zexp−z(p)∥2\min_{\mathbf{p}} J(\mathbf{p}) = \|\mathbf{z}_{exp} - \mathbf{z}(\mathbf{p})\|^2pminJ(p)=∥zexp−z(p)∥2
其中:
- p\mathbf{p}p:待修正的模型参数
- zexp\mathbf{z}_{exp}zexp:实测数据(频率、振型等)
- z(p)\mathbf{z}(\mathbf{p})z(p):模型预测数据
- J(p)J(\mathbf{p})J(p):目标函数
约束条件:
- 参数物理意义约束:pmin≤p≤pmax\mathbf{p}_{min} \leq \mathbf{p} \leq \mathbf{p}_{max}pmin≤p≤pmax
- 正定性约束:K(p)>0\mathbf{K}(\mathbf{p}) > 0K(p)>0,M(p)>0\mathbf{M}(\mathbf{p}) > 0M(p)>0
1.3 模型修正方法分类
1. 直接方法
- 基于矩阵的修正方法
- 基于特征方程的修正方法
2. 迭代方法
- 基于灵敏度分析的修正方法
- 基于优化算法的修正方法
3. 代理模型方法
- 响应面方法
- 神经网络方法
- Kriging方法
2. 理论基础
2.1 灵敏度分析方法
2.1.1 特征值灵敏度
特征值对设计参数的灵敏度:
∂λi∂pj=ϕiT(∂K∂pj−λi∂M∂pj)ϕiϕiTMϕi\frac{\partial \lambda_i}{\partial p_j} = \frac{\boldsymbol{\phi}_i^T \left(\frac{\partial \mathbf{K}}{\partial p_j} - \lambda_i \frac{\partial \mathbf{M}}{\partial p_j}\right) \boldsymbol{\phi}_i}{\boldsymbol{\phi}_i^T \mathbf{M} \boldsymbol{\phi}_i}∂pj∂λi=ϕiTMϕiϕiT(∂pj∂K−λi∂pj∂M)ϕi
其中:
- λi=ωi2\lambda_i = \omega_i^2λi=ωi2:第i阶特征值
- ϕi\boldsymbol{\phi}_iϕi:第i阶模态振型
- pjp_jpj:第j个设计参数
2.1.2 特征向量灵敏度
特征向量对设计参数的灵敏度:
∂ϕi∂pj=∑k=1,k≠inϕkT(∂K∂pj−λi∂M∂pj)ϕi(λi−λk)ϕkTMϕkϕk\frac{\partial \boldsymbol{\phi}_i}{\partial p_j} = \sum_{k=1, k \neq i}^{n} \frac{\boldsymbol{\phi}_k^T \left(\frac{\partial \mathbf{K}}{\partial p_j} - \lambda_i \frac{\partial \mathbf{M}}{\partial p_j}\right) \boldsymbol{\phi}_i}{(\lambda_i - \lambda_k)\boldsymbol{\phi}_k^T \mathbf{M} \boldsymbol{\phi}_k} \boldsymbol{\phi}_k∂pj∂ϕi=k=1,k=i∑n(λi−λk)ϕkTMϕkϕkT(∂pj∂K−λi∂pj∂M)ϕiϕk
2.1.3 灵敏度矩阵
灵敏度矩阵建立了参数变化与模态参数变化之间的关系:
S=[∂ω1∂p1⋯∂ω1∂pm⋮⋱⋮∂ωn∂p1⋯∂ωn∂pm∂ϕ11∂p1⋯∂ϕ11∂pm⋮⋱⋮]\mathbf{S} = \begin{bmatrix} \frac{\partial \omega_1}{\partial p_1} & \cdots & \frac{\partial \omega_1}{\partial p_m} \\ \vdots & \ddots & \vdots \\ \frac{\partial \omega_n}{\partial p_1} & \cdots & \frac{\partial \omega_n}{\partial p_m} \\ \frac{\partial \phi_{11}}{\partial p_1} & \cdots & \frac{\partial \phi_{11}}{\partial p_m} \\ \vdots & \ddots & \vdots \end{bmatrix}S= ∂p1∂ω1⋮∂p1∂ωn∂p1∂ϕ11⋮⋯⋱⋯⋯⋱∂pm∂ω1⋮∂pm∂ωn∂pm∂ϕ11⋮
2.2 基于灵敏度分析的模型修正
2.2.1 线性修正方程
利用灵敏度矩阵,建立线性修正方程:
Δz=SΔp\Delta \mathbf{z} = \mathbf{S} \Delta \mathbf{p}Δz=SΔp
其中:
- Δz=zexp−zana\Delta \mathbf{z} = \mathbf{z}_{exp} - \mathbf{z}_{ana}Δz=zexp−zana:残差向量
- Δp\Delta \mathbf{p}Δp:参数修正量
2.2.2 最小二乘解
当灵敏度矩阵不是方阵时,采用最小二乘法求解:
Δp=(STS)−1STΔz\Delta \mathbf{p} = (\mathbf{S}^T \mathbf{S})^{-1} \mathbf{S}^T \Delta \mathbf{z}Δp=(STS)−1STΔz
2.2.3 加权最小二乘
考虑不同测量数据的可靠性差异:
Δp=(STWS)−1STWΔz\Delta \mathbf{p} = (\mathbf{S}^T \mathbf{W} \mathbf{S})^{-1} \mathbf{S}^T \mathbf{W} \Delta \mathbf{z}Δp=(STWS)−1STWΔz
其中,W\mathbf{W}W为权重矩阵。
2.2.4 迭代修正算法
1. 初始化参数 p₀
2. 计算当前模态参数 z(pₖ)
3. 计算残差 Δz = z_exp - z(pₖ)
4. 计算灵敏度矩阵 S
5. 求解修正量 Δp
6. 更新参数 pₖ₊₁ = pₖ + α·Δp
7. 检查收敛条件
8. 若不收敛,返回步骤2
2.3 基于特征方程的模型修正
2.3.1 矩阵修正方法
直接修正刚度矩阵和质量矩阵:
(K+ΔK)ϕi=λi(M+ΔM)ϕi(\mathbf{K} + \Delta \mathbf{K})\boldsymbol{\phi}_i = \lambda_i (\mathbf{M} + \Delta \mathbf{M})\boldsymbol{\phi}_i(K+ΔK)ϕi=λi(M+ΔM)ϕi
2.3.2 最小秩修正
寻找最小秩的矩阵修正:
minrank(ΔK)\min \text{rank}(\Delta \mathbf{K})minrank(ΔK)
约束条件:
(K+ΔK)Φ=MΦΛ(\mathbf{K} + \Delta \mathbf{K})\boldsymbol{\Phi} = \mathbf{M}\boldsymbol{\Phi}\boldsymbol{\Lambda}(K+ΔK)Φ=MΦΛ
2.3.3 最优矩阵修正
考虑矩阵的对称性和稀疏性:
minΔK∥ΔK∥F\min_{\Delta \mathbf{K}} \|\Delta \mathbf{K}\|_FΔKmin∥ΔK∥F
约束条件:
- (K+ΔK)Φ=MΦΛ(\mathbf{K} + \Delta \mathbf{K})\boldsymbol{\Phi} = \mathbf{M}\boldsymbol{\Phi}\boldsymbol{\Lambda}(K+ΔK)Φ=MΦΛ
- ΔK=ΔKT\Delta \mathbf{K} = \Delta \mathbf{K}^TΔK=ΔKT
- 保持原有零元素位置
2.4 基于响应面的模型修正
2.4.1 响应面方法
用多项式函数近似模型响应与参数之间的关系:
zi(p)≈a0+∑j=1majpj+∑j=1m∑k=jmbjkpjpkz_i(\mathbf{p}) \approx a_0 + \sum_{j=1}^{m} a_j p_j + \sum_{j=1}^{m} \sum_{k=j}^{m} b_{jk} p_j p_kzi(p)≈a0+j=1∑majpj+j=1∑mk=j∑mbjkpjpk
2.4.2 试验设计
选择合适的样本点构建响应面:
- 全因子设计
- 中心复合设计
- Box-Behnken设计
- 拉丁超立方采样
2.4.3 响应面优化
基于响应面进行优化:
minp∥zexp−zRSM(p)∥2\min_{\mathbf{p}} \|\mathbf{z}_{exp} - \mathbf{z}_{RSM}(\mathbf{p})\|^2pmin∥zexp−zRSM(p)∥2
2.5 基于优化算法的模型修正
2.5.1 目标函数
常用的目标函数形式:
频率残差:
Jf=∑i=1nwif(fiexp−fi(p)fiexp)2J_f = \sum_{i=1}^{n} w_i^f \left(\frac{f_i^{exp} - f_i(\mathbf{p})}{f_i^{exp}}\right)^2Jf=i=1∑nwif(fiexpfiexp−fi(p))2
振型残差(MAC):
Jϕ=∑i=1nwiϕ(1−MAC(ϕiexp,ϕi(p)))2J_\phi = \sum_{i=1}^{n} w_i^\phi (1 - MAC(\boldsymbol{\phi}_i^{exp}, \boldsymbol{\phi}_i(\mathbf{p})))^2Jϕ=i=1∑nwiϕ(1−MAC(ϕiexp,ϕi(p)))2
综合目标函数:
J=Jf+JϕJ = J_f + J_\phiJ=Jf+Jϕ
2.5.2 优化算法
梯度类算法:
- 最速下降法
- 共轭梯度法
- 拟牛顿法(BFGS)
启发式算法:
- 遗传算法(GA)
- 粒子群优化(PSO)
- 模拟退火(SA)
3. 案例分析
3.1 案例1:基于灵敏度分析的模型修正
问题描述:
利用灵敏度分析方法修正简支梁有限元模型的刚度参数,使模型预测的固有频率与实测频率一致。
Python代码实现:
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
import matplotlib
matplotlib.use('Agg')
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
from scipy.linalg import eigh, pinv
class BeamModel:
"""简支梁有限元模型"""
def __init__(self, L, EI, rhoA, n_elements=10):
self.L = L
self.EI_base = EI
self.rhoA = rhoA
self.n_elements = n_elements
self.le = L / n_elements
self.K_base, self.M = self._build_matrices()
self.EI = EI * np.ones(n_elements) # 每个单元的刚度修正系数
def _build_matrices(self):
"""建立刚度和质量矩阵"""
n_nodes = self.n_elements + 1
n_dof = 2 * n_nodes
K = np.zeros((n_dof, n_dof))
M = np.zeros((n_dof, n_dof))
k_e = self.EI_base / self.le**3 * np.array([
[12, 6*self.le, -12, 6*self.le],
[6*self.le, 4*self.le**2, -6*self.le, 2*self.le**2],
[-12, -6*self.le, 12, -6*self.le],
[6*self.le, 2*self.le**2, -6*self.le, 4*self.le**2]
])
m_e = self.rhoA * self.le / 420 * np.array([
[156, 22*self.le, 54, -13*self.le],
[22*self.le, 4*self.le**2, 13*self.le, -3*self.le**2],
[54, 13*self.le, 156, -22*self.le],
[-13*self.le, -3*self.le**2, -22*self.le, 4*self.le**2]
])
for i in range(self.n_elements):
dof = [2*i, 2*i+1, 2*i+2, 2*i+3]
for ii in range(4):
for jj in range(4):
K[dof[ii], dof[jj]] += k_e[ii, jj]
M[dof[ii], dof[jj]] += m_e[ii, jj]
return K, M
def get_system_matrices(self):
"""获取考虑修正的系统矩阵"""
K = np.zeros_like(self.K_base)
for i in range(self.n_elements):
dof = [2*i, 2*i+1, 2*i+2, 2*i+3]
k_e = self.EI[i] / self.EI_base
for ii in range(4):
for jj in range(4):
K[dof[ii], dof[jj]] += k_e * self.K_base[dof[ii], dof[jj]]
return K, self.M
def solve_modal(self, n_modes=5):
"""求解模态参数"""
K, M = self.get_system_matrices()
bc_dofs = [0, -2]
free_dofs = [i for i in range(K.shape[0]) if i not in bc_dofs]
K_reduced = K[np.ix_(free_dofs, free_dofs)]
M_reduced = M[np.ix_(free_dofs, free_dofs)]
eigenvalues, eigenvectors = eigh(K_reduced, M_reduced)
eigenvalues = np.maximum(eigenvalues, 1e-10)
frequencies = np.sqrt(eigenvalues) / (2 * np.pi)
mode_shapes = np.zeros((K.shape[0], n_modes))
for i in range(n_modes):
mode_shapes[free_dofs, i] = eigenvectors[:, i]
mode_shapes[:, i] /= np.max(np.abs(mode_shapes[:, i]))
return frequencies[:n_modes], mode_shapes[:, :n_modes]
class SensitivityBasedUpdating:
"""基于灵敏度分析的模型修正"""
def __init__(self, model):
self.model = model
self.history = {'parameters': [], 'frequencies': [], 'residuals': []}
def compute_sensitivity_matrix(self, n_modes=3, delta=1e-6):
"""
计算灵敏度矩阵
Parameters:
-----------
n_modes : int
考虑的模态数
delta : float
差分步长
Returns:
--------
S : array
灵敏度矩阵 (n_modes × n_parameters)
"""
f0, _ = self.model.solve_modal(n_modes)
n_params = self.model.n_elements
S = np.zeros((n_modes, n_params))
for j in range(n_params):
# 正向扰动
self.model.EI[j] += delta
f_plus, _ = self.model.solve_modal(n_modes)
# 负向扰动
self.model.EI[j] -= 2 * delta
f_minus, _ = self.model.solve_modal(n_modes)
# 中心差分
S[:, j] = (f_plus - f_minus) / (2 * delta)
# 恢复原值
self.model.EI[j] += delta
return S
def update_model(self, target_frequencies, n_iterations=20, alpha=0.5, tol=1e-6):
"""
修正模型参数
Parameters:
-----------
target_frequencies : array
目标频率
n_iterations : int
最大迭代次数
alpha : float
步长因子
tol : float
收敛容差
Returns:
--------
success : bool
是否收敛
"""
n_modes = len(target_frequencies)
for iteration in range(n_iterations):
# 计算当前频率
f_current, _ = self.model.solve_modal(n_modes)
# 计算残差
residual = target_frequencies - f_current
residual_norm = np.linalg.norm(residual)
# 记录历史
self.history['parameters'].append(self.model.EI.copy())
self.history['frequencies'].append(f_current.copy())
self.history['residuals'].append(residual_norm)
print(f" 迭代 {iteration+1}: 残差 = {residual_norm:.6f}")
# 检查收敛
if residual_norm < tol:
print(f" 收敛!")
return True
# 计算灵敏度矩阵
S = self.compute_sensitivity_matrix(n_modes)
# 求解修正量(最小二乘)
try:
delta_p = pinv(S) @ residual
except:
delta_p = np.linalg.lstsq(S, residual, rcond=None)[0]
# 更新参数
self.model.EI += alpha * delta_p
# 确保参数为正
self.model.EI = np.maximum(self.model.EI, 0.1 * self.model.EI_base)
print(f" 达到最大迭代次数")
return False
def case1_sensitivity_updating():
"""案例1:基于灵敏度分析的模型修正"""
print("="*60)
print("主题062 - 案例1: 基于灵敏度分析的模型修正")
print("="*60)
# 创建模型
L = 10.0
EI = 2e8
rhoA = 500
n_elements = 10
model = BeamModel(L, EI, rhoA, n_elements)
# 获取"实测"频率(使用真实参数)
f_true, modes_true = model.solve_modal(3)
print("\n真实模态参数:")
for i, f in enumerate(f_true):
print(f" 第{i+1}阶频率: {f:.3f} Hz")
# 引入误差(模拟不准确的初始模型)
np.random.seed(42)
error_factors = np.random.uniform(0.7, 1.3, n_elements)
model.EI = EI * error_factors
f_initial, _ = model.solve_modal(3)
print("\n初始模型频率:")
for i, f in enumerate(f_initial):
print(f" 第{i+1}阶频率: {f:.3f} Hz (误差: {(f-f_true[i])/f_true[i]*100:.1f}%)")
# 模型修正
print("\n开始模型修正...")
updater = SensitivityBasedUpdating(model)
updater.update_model(f_true, n_iterations=15, alpha=0.3)
# 修正后结果
f_updated, _ = model.solve_modal(3)
print("\n修正后模型频率:")
for i, f in enumerate(f_updated):
print(f" 第{i+1}阶频率: {f:.3f} Hz (误差: {(f-f_true[i])/f_true[i]*100:.1f}%)")
# 可视化
fig, axes = plt.subplots(2, 2, figsize=(14, 10))
# 1. 参数收敛历史
ax = axes[0, 0]
param_history = np.array(updater.history['parameters']) / EI
for i in range(n_elements):
ax.plot(param_history[:, i], label=f'单元{i+1}', alpha=0.7)
ax.axhline(y=1.0, color='red', linestyle='--', linewidth=2, label='真实值')
ax.set_xlabel('迭代次数')
ax.set_ylabel('刚度修正系数')
ax.set_title('参数收敛历史')
ax.legend(bbox_to_anchor=(1.05, 1), loc='upper left', fontsize=8)
ax.grid(True, alpha=0.3)
# 2. 频率收敛历史
ax = axes[0, 1]
freq_history = np.array(updater.history['frequencies'])
for i in range(3):
ax.plot(freq_history[:, i], label=f'第{i+1}阶', alpha=0.7)
ax.axhline(y=f_true[i], color='red', linestyle='--', linewidth=1, alpha=0.5)
ax.set_xlabel('迭代次数')
ax.set_ylabel('频率 (Hz)')
ax.set_title('频率收敛历史')
ax.legend()
ax.grid(True, alpha=0.3)
# 3. 残差收敛
ax = axes[1, 0]
ax.semilogy(updater.history['residuals'], 'b-', linewidth=2)
ax.set_xlabel('迭代次数')
ax.set_ylabel('残差范数')
ax.set_title('残差收敛曲线')
ax.grid(True, alpha=0.3)
# 4. 频率对比
ax = axes[1, 1]
x = np.arange(3)
width = 0.25
ax.bar(x - width, f_true, width, label='真实值', color='green', alpha=0.8)
ax.bar(x, f_initial, width, label='初始模型', color='red', alpha=0.8)
ax.bar(x + width, f_updated, width, label='修正后', color='blue', alpha=0.8)
ax.set_xlabel('模态阶数')
ax.set_ylabel('频率 (Hz)')
ax.set_title('频率对比')
ax.set_xticks(x)
ax.set_xticklabels([f'第{i+1}阶' for i in range(3)])
ax.legend()
ax.grid(True, alpha=0.3, axis='y')
plt.tight_layout()
plt.savefig('sensitivity_updating.png', dpi=150, bbox_inches='tight')
print("\n灵敏度分析模型修正图已保存: sensitivity_updating.png")
plt.close()
# 创建动画
fig, axes = plt.subplots(1, 2, figsize=(14, 5))
ax1 = axes[0]
lines1 = []
for i in range(n_elements):
line, = ax1.plot([], [], label=f'单元{i+1}', alpha=0.7)
lines1.append(line)
ax1.set_xlim(0, len(updater.history['parameters']))
ax1.set_ylim(0.5, 1.5)
ax1.set_xlabel('迭代次数')
ax1.set_ylabel('刚度修正系数')
ax1.set_title('参数收敛动画')
ax1.legend(bbox_to_anchor=(1.05, 1), loc='upper left', fontsize=8)
ax1.grid(True, alpha=0.3)
ax2 = axes[1]
lines2 = []
for i in range(3):
line, = ax2.plot([], [], label=f'第{i+1}阶', alpha=0.7)
lines2.append(line)
ax2.set_xlim(0, len(updater.history['frequencies']))
ax2.set_ylim(np.min(freq_history) * 0.9, np.max(freq_history) * 1.1)
ax2.set_xlabel('迭代次数')
ax2.set_ylabel('频率 (Hz)')
ax2.set_title('频率收敛动画')
ax2.legend()
ax2.grid(True, alpha=0.3)
def animate(frame):
for i, line in enumerate(lines1):
line.set_data(range(frame+1), param_history[:frame+1, i])
for i, line in enumerate(lines2):
line.set_data(range(frame+1), freq_history[:frame+1, i])
return lines1 + lines2
anim = FuncAnimation(fig, animate, frames=len(updater.history['parameters']),
interval=300, blit=False)
anim.save('sensitivity_animation.gif', writer='pillow', fps=3, dpi=100)
print("灵敏度分析动画已保存: sensitivity_animation.gif")
plt.close()
return updater
if __name__ == "__main__":
updater = case1_sensitivity_updating()
3.2 案例2:基于特征方程的模型修正
问题描述:
利用特征方程方法直接修正结构的质量矩阵和刚度矩阵,使修正后的矩阵满足实测的模态参数。
Python代码实现:
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
import matplotlib
matplotlib.use('Agg')
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
from scipy.linalg import eigh, svd, pinv
class EigenvalueBasedUpdating:
"""基于特征方程的模型修正"""
def __init__(self, K_initial, M_initial):
"""
初始化
Parameters:
-----------
K_initial : array
初始刚度矩阵
M_initial : array
初始质量矩阵
"""
self.K0 = K_initial
self.M0 = M_initial
self.n_dof = K_initial.shape[0]
self.history = {'K_error': [], 'M_error': [], 'eigenvalue_error': []}
def update_matrix_direct(self, target_eigenvalues, target_eigenvectors,
n_modes=None, alpha_K=0.5, alpha_M=0.5):
"""
直接矩阵修正方法
Parameters:
-----------
target_eigenvalues : array
目标特征值
target_eigenvectors : array
目标特征向量
n_modes : int
使用的模态数
alpha_K, alpha_M : float
修正系数
Returns:
--------
K_updated : array
修正后的刚度矩阵
M_updated : array
修正后的质量矩阵
"""
if n_modes is None:
n_modes = len(target_eigenvalues)
# 提取前n_modes阶模态
Lambda_target = np.diag(target_eigenvalues[:n_modes])
Phi_target = target_eigenvectors[:, :n_modes]
# 计算当前模态
eigenvalues, eigenvectors = eigh(self.K0, self.M0)
Lambda_current = np.diag(eigenvalues[:n_modes])
Phi_current = eigenvectors[:, :n_modes]
# 刚度矩阵修正
delta_K = alpha_K * (Phi_target @ Lambda_target @ Phi_target.T -
Phi_current @ Lambda_current @ Phi_current.T)
K_updated = self.K0 + delta_K
# 质量矩阵修正
delta_M = alpha_M * (Phi_target @ Phi_target.T - Phi_current @ Phi_current.T)
M_updated = self.M0 + delta_M
# 确保对称性
K_updated = 0.5 * (K_updated + K_updated.T)
M_updated = 0.5 * (M_updated + M_updated.T)
return K_updated, M_updated
def update_matrix_optimal(self, target_eigenvalues, target_eigenvectors,
n_modes=None, weight_K=1.0, weight_M=1.0):
"""
最优矩阵修正方法
Parameters:
-----------
target_eigenvalues : array
目标特征值
target_eigenvectors : array
目标特征向量
n_modes : int
使用的模态数
weight_K, weight_M : float
权重系数
Returns:
--------
K_updated : array
修正后的刚度矩阵
M_updated : array
修正后的质量矩阵
"""
if n_modes is None:
n_modes = len(target_eigenvalues)
# 提取前n_modes阶模态
Lambda = np.diag(target_eigenvalues[:n_modes])
Phi = target_eigenvectors[:, :n_modes]
# 构建约束矩阵
B_K = np.zeros((n_modes * self.n_dof, self.n_dof * self.n_dof))
B_M = np.zeros((n_modes * self.n_dof, self.n_dof * self.n_dof))
for i in range(n_modes):
phi_i = Phi[:, i]
lambda_i = target_eigenvalues[i]
for j in range(self.n_dof):
for k in range(self.n_dof):
idx = j * self.n_dof + k
B_K[i * self.n_dof + j, idx] = phi_i[k] * phi_i[j]
B_M[i * self.n_dof + j, idx] = lambda_i * phi_i[k] * phi_i[j]
# 目标向量
target_K = (Phi @ Lambda @ Phi.T).flatten()
target_M = (Phi @ Phi.T).flatten()
# 最小二乘求解
K0_flat = self.K0.flatten()
M0_flat = self.M0.flatten()
# 修正量
delta_K_flat = pinv(B_K) @ (target_K - B_K @ K0_flat)
delta_M_flat = pinv(B_M) @ (target_M - B_M @ M0_flat)
# 重构矩阵
K_updated = self.K0 + weight_K * delta_K_flat.reshape(self.n_dof, self.n_dof)
M_updated = self.M0 + weight_M * delta_M_flat.reshape(self.n_dof, self.n_dof)
# 确保对称性和正定性
K_updated = 0.5 * (K_updated + K_updated.T)
M_updated = 0.5 * (M_updated + M_updated.T)
# 添加正则化确保正定性
K_updated += 1e-6 * np.eye(self.n_dof) * np.trace(K_updated) / self.n_dof
M_updated += 1e-6 * np.eye(self.n_dof) * np.trace(M_updated) / self.n_dof
return K_updated, M_updated
def compute_error(self, K, M, target_eigenvalues, target_eigenvectors, n_modes=3):
"""计算误差"""
eigenvalues, eigenvectors = eigh(K, M)
# 特征值误差
ev_error = np.linalg.norm(eigenvalues[:n_modes] - target_eigenvalues[:n_modes])
# 矩阵误差(相对于真实矩阵)
K_error = np.linalg.norm(K - self.K0) / np.linalg.norm(self.K0)
M_error = np.linalg.norm(M - self.M0) / np.linalg.norm(self.M0)
return ev_error, K_error, M_error
def create_mass_spring_system(n_dof=5, k_base=1000, m_base=1.0,
k_error=0.2, m_error=0.1):
"""
创建质量-弹簧系统
Parameters:
-----------
n_dof : int
自由度数量
k_base : float
基础刚度
m_base : float
基础质量
k_error : float
刚度误差比例
m_error : float
质量误差比例
Returns:
--------
K_true, M_true : 真实矩阵
K_initial, M_initial : 初始(有误差的)矩阵
"""
# 真实刚度矩阵(三对角)
K_true = np.zeros((n_dof, n_dof))
for i in range(n_dof):
if i > 0:
K_true[i, i-1] = -k_base
K_true[i-1, i] = -k_base
K_true[i, i] = 2 * k_base
K_true[0, 0] = k_base
K_true[-1, -1] = k_base
# 真实质量矩阵(对角)
M_true = m_base * np.eye(n_dof)
# 添加误差
np.random.seed(42)
K_perturb = np.random.uniform(-k_error, k_error, (n_dof, n_dof))
M_perturb = np.random.uniform(-m_error, m_error, (n_dof, n_dof))
K_initial = K_true * (1 + K_perturb)
M_initial = M_true * (1 + np.diag(np.diag(M_perturb)))
# 确保对称性
K_initial = 0.5 * (K_initial + K_initial.T)
return K_true, M_true, K_initial, M_initial
def case2_eigenvalue_updating():
"""案例2:基于特征方程的模型修正"""
print("="*60)
print("主题062 - 案例2: 基于特征方程的模型修正")
print("="*60)
# 创建系统
n_dof = 5
k_base = 1000
m_base = 1.0
K_true, M_true, K_initial, M_initial = create_mass_spring_system(
n_dof, k_base, m_base, k_error=0.3, m_error=0.2
)
# 获取真实模态
eigenvalues_true, eigenvectors_true = eigh(K_true, M_true)
frequencies_true = np.sqrt(eigenvalues_true) / (2 * np.pi)
print("\n真实模态参数:")
for i in range(3):
print(f" 第{i+1}阶: 频率 = {frequencies_true[i]:.3f} Hz")
# 初始模态
eigenvalues_initial, eigenvectors_initial = eigh(K_initial, M_initial)
frequencies_initial = np.sqrt(eigenvalues_initial) / (2 * np.pi)
print("\n初始模型模态:")
for i in range(3):
error = (frequencies_initial[i] - frequencies_true[i]) / frequencies_true[i] * 100
print(f" 第{i+1}阶: 频率 = {frequencies_initial[i]:.3f} Hz (误差: {error:.1f}%)")
# 模型修正
print("\n开始模型修正...")
updater = EigenvalueBasedUpdating(K_initial, M_initial)
# 方法1:直接修正
print("\n方法1: 直接矩阵修正")
K_direct, M_direct = updater.update_matrix_direct(
eigenvalues_true, eigenvectors_true, n_modes=3, alpha_K=0.8, alpha_M=0.8
)
eigenvalues_direct, eigenvectors_direct = eigh(K_direct, M_direct)
frequencies_direct = np.sqrt(eigenvalues_direct) / (2 * np.pi)
print("修正后模态:")
for i in range(3):
error = (frequencies_direct[i] - frequencies_true[i]) / frequencies_true[i] * 100
print(f" 第{i+1}阶: 频率 = {frequencies_direct[i]:.3f} Hz (误差: {error:.1f}%)")
# 方法2:最优修正
print("\n方法2: 最优矩阵修正")
K_optimal, M_optimal = updater.update_matrix_optimal(
eigenvalues_true, eigenvectors_true, n_modes=3, weight_K=1.0, weight_M=1.0
)
eigenvalues_optimal, eigenvectors_optimal = eigh(K_optimal, M_optimal)
frequencies_optimal = np.sqrt(eigenvalues_optimal) / (2 * np.pi)
print("修正后模态:")
for i in range(3):
error = (frequencies_optimal[i] - frequencies_true[i]) / frequencies_true[i] * 100
print(f" 第{i+1}阶: 频率 = {frequencies_optimal[i]:.3f} Hz (误差: {error:.1f}%)")
# 可视化
fig, axes = plt.subplots(2, 3, figsize=(15, 10))
# 1. 刚度矩阵对比
ax = axes[0, 0]
im = ax.imshow(K_true, cmap='RdBu_r', aspect='auto')
ax.set_title('真实刚度矩阵')
ax.set_xlabel('自由度')
ax.set_ylabel('自由度')
plt.colorbar(im, ax=ax)
ax = axes[0, 1]
im = ax.imshow(K_initial, cmap='RdBu_r', aspect='auto')
ax.set_title('初始刚度矩阵')
ax.set_xlabel('自由度')
ax.set_ylabel('自由度')
plt.colorbar(im, ax=ax)
ax = axes[0, 2]
im = ax.imshow(K_optimal, cmap='RdBu_r', aspect='auto')
ax.set_title('修正后刚度矩阵')
ax.set_xlabel('自由度')
ax.set_ylabel('自由度')
plt.colorbar(im, ax=ax)
# 2. 质量矩阵对比
ax = axes[1, 0]
im = ax.imshow(M_true, cmap='RdBu_r', aspect='auto')
ax.set_title('真实质量矩阵')
ax.set_xlabel('自由度')
ax.set_ylabel('自由度')
plt.colorbar(im, ax=ax)
ax = axes[1, 1]
im = ax.imshow(M_initial, cmap='RdBu_r', aspect='auto')
ax.set_title('初始质量矩阵')
ax.set_xlabel('自由度')
ax.set_ylabel('自由度')
plt.colorbar(im, ax=ax)
ax = axes[1, 2]
im = ax.imshow(M_optimal, cmap='RdBu_r', aspect='auto')
ax.set_title('修正后质量矩阵')
ax.set_xlabel('自由度')
ax.set_ylabel('自由度')
plt.colorbar(im, ax=ax)
plt.tight_layout()
plt.savefig('eigenvalue_updating.png', dpi=150, bbox_inches='tight')
print("\n特征方程模型修正图已保存: eigenvalue_updating.png")
plt.close()
# 频率对比图
fig, ax = plt.subplots(figsize=(10, 6))
x = np.arange(n_dof)
width = 0.2
ax.bar(x - 1.5*width, frequencies_true, width, label='真实值', color='green', alpha=0.8)
ax.bar(x - 0.5*width, frequencies_initial, width, label='初始模型', color='red', alpha=0.8)
ax.bar(x + 0.5*width, frequencies_direct, width, label='直接修正', color='blue', alpha=0.8)
ax.bar(x + 1.5*width, frequencies_optimal, width, label='最优修正', color='purple', alpha=0.8)
ax.set_xlabel('模态阶数')
ax.set_ylabel('频率 (Hz)')
ax.set_title('频率对比')
ax.set_xticks(x)
ax.set_xticklabels([f'第{i+1}阶' for i in range(n_dof)])
ax.legend()
ax.grid(True, alpha=0.3, axis='y')
plt.tight_layout()
plt.savefig('frequency_comparison.png', dpi=150, bbox_inches='tight')
print("频率对比图已保存: frequency_comparison.png")
plt.close()
return updater
if __name__ == "__main__":
updater = case2_eigenvalue_updating()
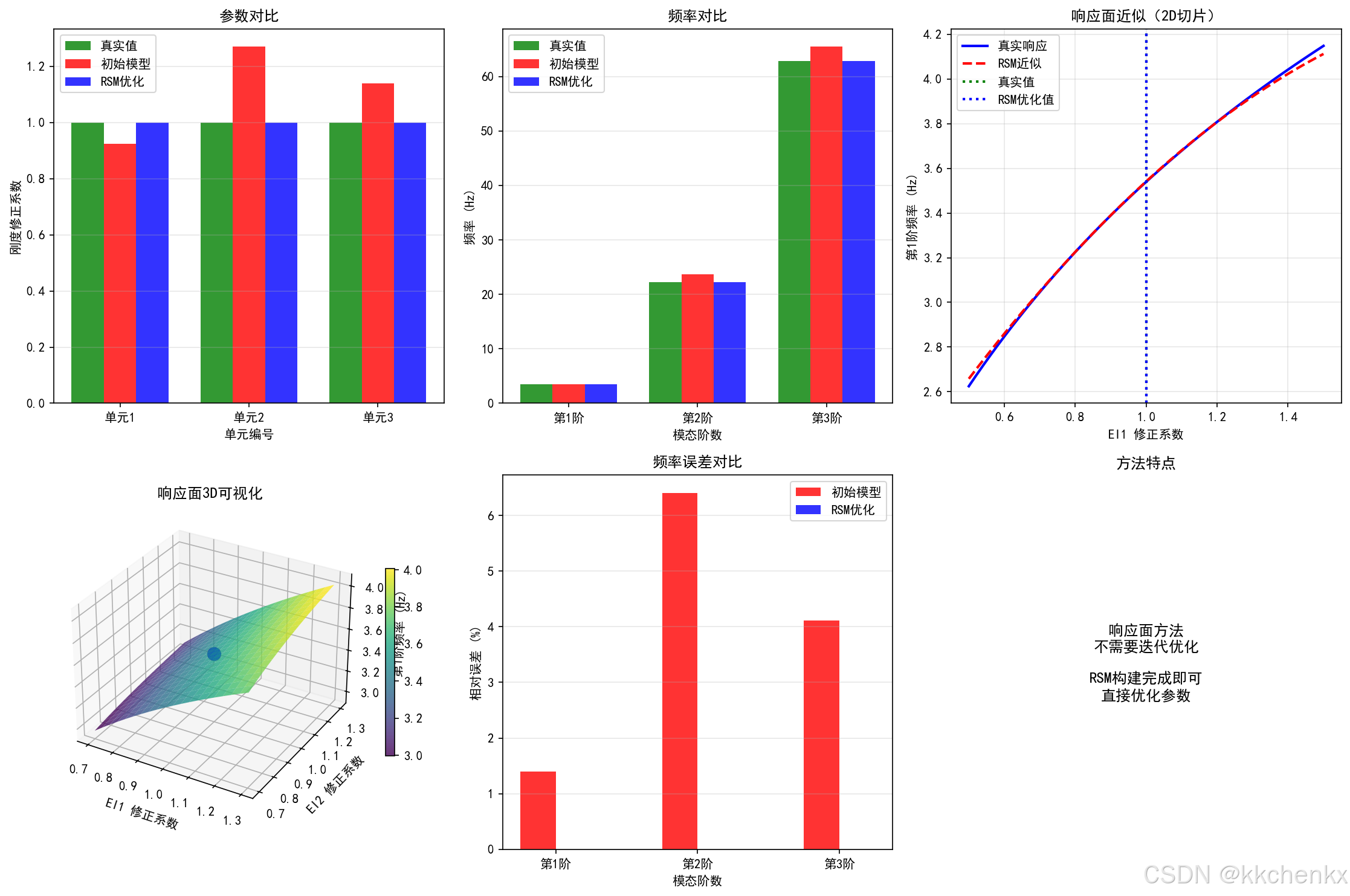
3.3 案例3:基于响应面的模型修正
问题描述:
利用响应面方法建立模型参数与模态参数之间的近似关系,通过优化响应面函数来修正模型参数。
Python代码实现:
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
from mpl_toolkits.mplot3d import Axes3D
import matplotlib
matplotlib.use('Agg')
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
from scipy.linalg import eigh
from scipy.optimize import minimize
class ResponseSurfaceModel:
"""响应面模型"""
def __init__(self, n_params, n_responses):
"""
初始化响应面模型
Parameters:
-----------
n_params : int
参数数量
n_responses : int
响应数量
"""
self.n_params = n_params
self.n_responses = n_responses
self.coefficients = None
self.X_mean = None
self.X_std = None
self.y_mean = None
self.y_std = None
def generate_samples(self, param_ranges, n_samples=50):
"""
生成样本点(拉丁超立方采样)
Parameters:
-----------
param_ranges : list
参数范围列表 [(min1, max1), (min2, max2), ...]
n_samples : int
样本数量
Returns:
--------
samples : array
样本点 (n_samples × n_params)
"""
samples = np.zeros((n_samples, self.n_params))
for i in range(self.n_params):
pmin, pmax = param_ranges[i]
# 拉丁超立方采样
cut = np.linspace(0, 1, n_samples + 1)
u = np.random.rand(n_samples)
samples[:, i] = pmin + (pmax - pmin) * (cut[:-1] + u * (cut[1] - cut[:-1]))
return samples
def fit(self, X, y):
"""
拟合响应面(二次多项式)
Parameters:
-----------
X : array
输入样本 (n_samples × n_params)
y : array
输出响应 (n_samples × n_responses)
"""
n_samples = X.shape[0]
# 标准化
self.X_mean = np.mean(X, axis=0)
self.X_std = np.std(X, axis=0)
self.y_mean = np.mean(y, axis=0)
self.y_std = np.std(y, axis=0)
X_norm = (X - self.X_mean) / (self.X_std + 1e-10)
y_norm = (y - self.y_mean) / (self.y_std + 1e-10)
# 构建设计矩阵(包含常数项、线性项和二次项)
n_terms = 1 + self.n_params + self.n_params * (self.n_params + 1) // 2
Phi = np.zeros((n_samples, n_terms))
col = 0
# 常数项
Phi[:, col] = 1
col += 1
# 线性项
for i in range(self.n_params):
Phi[:, col] = X_norm[:, i]
col += 1
# 二次项(包括交叉项)
for i in range(self.n_params):
for j in range(i, self.n_params):
Phi[:, col] = X_norm[:, i] * X_norm[:, j]
col += 1
# 最小二乘拟合
self.coefficients = np.linalg.lstsq(Phi, y_norm, rcond=None)[0]
def predict(self, X):
"""
预测响应
Parameters:
-----------
X : array
输入参数 (n_samples × n_params)
Returns:
--------
y_pred : array
预测响应
"""
n_samples = X.shape[0] if X.ndim > 1 else 1
X = X.reshape(n_samples, self.n_params)
# 标准化
X_norm = (X - self.X_mean) / (self.X_std + 1e-10)
# 构建设计矩阵
n_terms = 1 + self.n_params + self.n_params * (self.n_params + 1) // 2
Phi = np.zeros((n_samples, n_terms))
col = 0
Phi[:, col] = 1
col += 1
for i in range(self.n_params):
Phi[:, col] = X_norm[:, i]
col += 1
for i in range(self.n_params):
for j in range(i, self.n_params):
Phi[:, col] = X_norm[:, i] * X_norm[:, j]
col += 1
# 预测并反标准化
y_pred_norm = Phi @ self.coefficients
y_pred = y_pred_norm * (self.y_std + 1e-10) + self.y_mean
return y_pred
class RSMModelUpdating:
"""基于响应面的模型修正"""
def __init__(self, model_func):
"""
初始化
Parameters:
-----------
model_func : callable
模型函数,输入参数,输出频率
"""
self.model_func = model_func
self.rsm = None
self.history = {'params': [], 'errors': []}
def build_response_surface(self, param_ranges, n_samples=50):
"""
构建响应面
Parameters:
-----------
param_ranges : list
参数范围
n_samples : int
样本数量
"""
n_params = len(param_ranges)
# 生成样本
rsm_temp = ResponseSurfaceModel(n_params, 1)
X_samples = rsm_temp.generate_samples(param_ranges, n_samples)
# 计算响应
y_samples = np.zeros((n_samples, 3)) # 假设有3阶频率
for i in range(n_samples):
freqs = self.model_func(X_samples[i])
y_samples[i, :len(freqs)] = freqs[:3]
# 为每个响应构建响应面
self.rsm = []
for j in range(3):
rsm = ResponseSurfaceModel(n_params, 1)
rsm.fit(X_samples, y_samples[:, j:j+1])
self.rsm.append(rsm)
def optimize_parameters(self, target_frequencies, param_ranges, method='SLSQP'):
"""
优化参数
Parameters:
-----------
target_frequencies : array
目标频率
param_ranges : list
参数范围
method : str
优化方法
Returns:
--------
optimal_params : array
最优参数
"""
n_params = len(param_ranges)
# 目标函数
def objective(p):
error = 0
for i, rsm in enumerate(self.rsm[:len(target_frequencies)]):
f_pred = rsm.predict(p.reshape(1, -1))[0, 0]
error += ((f_pred - target_frequencies[i]) / target_frequencies[i])**2
return error
# 约束
bounds = param_ranges
# 初始猜测
x0 = np.array([(p[0] + p[1]) / 2 for p in param_ranges])
# 优化
result = minimize(objective, x0, method=method, bounds=bounds)
return result.x
def cantilever_beam_model(params, L=10.0, rhoA=500):
"""
悬臂梁模型
Parameters:
-----------
params : array
模型参数 [EI1, EI2, EI3, ...]
L : float
梁长度
rhoA : float
线密度
Returns:
--------
frequencies : array
固有频率
"""
n_elements = len(params)
le = L / n_elements
# 组装刚度矩阵和质量矩阵
n_dof = 2 * (n_elements + 1)
K = np.zeros((n_dof, n_dof))
M = np.zeros((n_dof, n_dof))
for i in range(n_elements):
EI = params[i]
k_e = EI / le**3 * np.array([
[12, 6*le, -12, 6*le],
[6*le, 4*le**2, -6*le, 2*le**2],
[-12, -6*le, 12, -6*le],
[6*le, 2*le**2, -6*le, 4*le**2]
])
m_e = rhoA * le / 420 * np.array([
[156, 22*le, 54, -13*le],
[22*le, 4*le**2, 13*le, -3*le**2],
[54, 13*le, 156, -22*le],
[-13*le, -3*le**2, -22*le, 4*le**2]
])
dof = [2*i, 2*i+1, 2*i+2, 2*i+3]
for ii in range(4):
for jj in range(4):
K[dof[ii], dof[jj]] += k_e[ii, jj]
M[dof[ii], dof[jj]] += m_e[ii, jj]
# 固支边界条件
bc_dofs = [0, 1]
free_dofs = [i for i in range(n_dof) if i not in bc_dofs]
K_reduced = K[np.ix_(free_dofs, free_dofs)]
M_reduced = M[np.ix_(free_dofs, free_dofs)]
# 求解特征值问题
eigenvalues, _ = eigh(K_reduced, M_reduced)
eigenvalues = np.maximum(eigenvalues, 1e-10)
frequencies = np.sqrt(eigenvalues) / (2 * np.pi)
return frequencies[:3]
def case3_response_surface_updating():
"""案例3:基于响应面的模型修正"""
print("="*60)
print("主题062 - 案例3: 基于响应面的模型修正")
print("="*60)
# 真实参数
EI_true = 2e8
n_elements = 3
L = 10.0
rhoA = 500
# 真实频率
params_true = np.ones(n_elements) * EI_true
f_true = cantilever_beam_model(params_true, L, rhoA)
print("\n真实模态参数:")
for i, f in enumerate(f_true):
print(f" 第{i+1}阶频率: {f:.3f} Hz")
# 初始参数(有误差的)
np.random.seed(42)
params_initial = EI_true * (1 + np.random.uniform(-0.3, 0.3, n_elements))
f_initial = cantilever_beam_model(params_initial, L, rhoA)
print("\n初始模型参数:")
for i, p in enumerate(params_initial):
print(f" EI{i+1} = {p:.2e}")
print("\n初始模型频率:")
for i, f in enumerate(f_initial):
error = (f - f_true[i]) / f_true[i] * 100
print(f" 第{i+1}阶频率: {f:.3f} Hz (误差: {error:.1f}%)")
# 构建响应面
print("\n构建响应面...")
updater = RSMModelUpdating(lambda p: cantilever_beam_model(p, L, rhoA))
param_ranges = [(0.5*EI_true, 1.5*EI_true) for _ in range(n_elements)]
updater.build_response_surface(param_ranges, n_samples=30)
# 优化参数
print("\n优化模型参数...")
params_optimal = updater.optimize_parameters(f_true, param_ranges)
f_rsm = cantilever_beam_model(params_optimal, L, rhoA)
print("\n优化后模型参数:")
for i, p in enumerate(params_optimal):
print(f" EI{i+1} = {p:.2e}")
print("\n优化后模型频率:")
for i, f in enumerate(f_rsm):
error = (f - f_true[i]) / f_true[i] * 100
print(f" 第{i+1}阶频率: {f:.3f} Hz (误差: {error:.1f}%)")
# 可视化
fig = plt.figure(figsize=(15, 10))
# 1. 参数对比
ax1 = fig.add_subplot(2, 3, 1)
x = np.arange(n_elements)
width = 0.25
ax1.bar(x - width, params_true/EI_true, width, label='真实值', color='green', alpha=0.8)
ax1.bar(x, params_initial/EI_true, width, label='初始模型', color='red', alpha=0.8)
ax1.bar(x + width, params_optimal/EI_true, width, label='RSM优化', color='blue', alpha=0.8)
ax1.set_xlabel('单元编号')
ax1.set_ylabel('刚度修正系数')
ax1.set_title('参数对比')
ax1.set_xticks(x)
ax1.set_xticklabels([f'单元{i+1}' for i in range(n_elements)])
ax1.legend()
ax1.grid(True, alpha=0.3, axis='y')
# 2. 频率对比
ax2 = fig.add_subplot(2, 3, 2)
x = np.arange(3)
ax2.bar(x - width, f_true, width, label='真实值', color='green', alpha=0.8)
ax2.bar(x, f_initial, width, label='初始模型', color='red', alpha=0.8)
ax2.bar(x + width, f_rsm, width, label='RSM优化', color='blue', alpha=0.8)
ax2.set_xlabel('模态阶数')
ax2.set_ylabel('频率 (Hz)')
ax2.set_title('频率对比')
ax2.set_xticks(x)
ax2.set_xticklabels([f'第{i+1}阶' for i in range(3)])
ax2.legend()
ax2.grid(True, alpha=0.3, axis='y')
# 3. 响应面可视化(2D切片)
ax3 = fig.add_subplot(2, 3, 3)
# 固定其他参数,变化第一个参数
p1_range = np.linspace(0.5*EI_true, 1.5*EI_true, 50)
f1_pred = []
f1_true_curve = []
for p1 in p1_range:
params = params_optimal.copy()
params[0] = p1
f1_true_curve.append(cantilever_beam_model(params, L, rhoA)[0])
# RSM预测
pred = updater.rsm[0].predict(np.array([[p1, params_optimal[1], params_optimal[2]]]))[0, 0]
f1_pred.append(pred)
ax3.plot(p1_range/EI_true, f1_true_curve, 'b-', linewidth=2, label='真实响应')
ax3.plot(p1_range/EI_true, f1_pred, 'r--', linewidth=2, label='RSM近似')
ax3.axvline(x=params_true[0]/EI_true, color='green', linestyle=':', linewidth=2, label='真实值')
ax3.axvline(x=params_optimal[0]/EI_true, color='blue', linestyle=':', linewidth=2, label='RSM优化值')
ax3.set_xlabel('EI1 修正系数')
ax3.set_ylabel('第1阶频率 (Hz)')
ax3.set_title('响应面近似(2D切片)')
ax3.legend()
ax3.grid(True, alpha=0.3)
# 4. 3D响应面
ax4 = fig.add_subplot(2, 3, 4, projection='3d')
p1_grid = np.linspace(0.7, 1.3, 20)
p2_grid = np.linspace(0.7, 1.3, 20)
P1, P2 = np.meshgrid(p1_grid, p2_grid)
F1 = np.zeros_like(P1)
for i in range(len(p1_grid)):
for j in range(len(p2_grid)):
params = np.array([P1[j, i]*EI_true, P2[j, i]*EI_true, params_optimal[2]])
F1[j, i] = cantilever_beam_model(params, L, rhoA)[0]
surf = ax4.plot_surface(P1, P2, F1, cmap='viridis', alpha=0.8)
ax4.scatter([params_true[0]/EI_true], [params_true[1]/EI_true], [f_true[0]],
color='red', s=100, label='真实值')
ax4.scatter([params_optimal[0]/EI_true], [params_optimal[1]/EI_true], [f_rsm[0]],
color='blue', s=100, label='RSM优化值')
ax4.set_xlabel('EI1 修正系数')
ax4.set_ylabel('EI2 修正系数')
ax4.set_zlabel('第1阶频率 (Hz)')
ax4.set_title('响应面3D可视化')
plt.colorbar(surf, ax=ax4, shrink=0.5)
# 5. 误差分析
ax5 = fig.add_subplot(2, 3, 5)
errors_initial = np.abs((f_initial - f_true) / f_true) * 100
errors_rsm = np.abs((f_rsm - f_true) / f_true) * 100
x = np.arange(3)
ax5.bar(x - width/2, errors_initial, width, label='初始模型', color='red', alpha=0.8)
ax5.bar(x + width/2, errors_rsm, width, label='RSM优化', color='blue', alpha=0.8)
ax5.set_xlabel('模态阶数')
ax5.set_ylabel('相对误差 (%)')
ax5.set_title('频率误差对比')
ax5.set_xticks(x)
ax5.set_xticklabels([f'第{i+1}阶' for i in range(3)])
ax5.legend()
ax5.grid(True, alpha=0.3, axis='y')
# 6. 收敛历史
ax6 = fig.add_subplot(2, 3, 6)
ax6.text(0.5, 0.5, '响应面方法\n不需要迭代优化\n\nRSM构建完成即可\n直接优化参数',
ha='center', va='center', fontsize=12, transform=ax6.transAxes)
ax6.set_xlim(0, 1)
ax6.set_ylim(0, 1)
ax6.axis('off')
ax6.set_title('方法特点')
plt.tight_layout()
plt.savefig('response_surface_updating.png', dpi=150, bbox_inches='tight')
print("\n响应面模型修正图已保存: response_surface_updating.png")
plt.close()
return updater
if __name__ == "__main__":
updater = case3_response_surface_updating()
3.4 案例4:基于优化算法的模型修正
问题描述:
利用遗传算法(GA)和粒子群优化(PSO)等启发式优化算法修正结构模型参数,使模型预测的模态参数与实测数据一致。
Python代码实现:
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
import matplotlib
matplotlib.use('Agg')
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
from scipy.linalg import eigh
from scipy.optimize import minimize
class ParticleSwarmOptimization:
"""粒子群优化算法"""
def __init__(self, n_particles=30, n_iterations=100, w=0.7, c1=1.5, c2=1.5):
"""
初始化PSO
Parameters:
-----------
n_particles : int
粒子数量
n_iterations : int
迭代次数
w : float
惯性权重
c1, c2 : float
学习因子
"""
self.n_particles = n_particles
self.n_iterations = n_iterations
self.w = w
self.c1 = c1
self.c2 = c2
self.history = {'best_fitness': [], 'avg_fitness': [], 'best_position': []}
def optimize(self, objective_func, bounds, n_params):
"""
优化
Parameters:
-----------
objective_func : callable
目标函数
bounds : list
参数范围 [(min1, max1), ...]
n_params : int
参数数量
Returns:
--------
best_position : array
最优参数
best_fitness : float
最优适应度
"""
# 初始化粒子
particles = np.zeros((self.n_particles, n_params))
velocities = np.zeros((self.n_particles, n_params))
for i in range(n_params):
pmin, pmax = bounds[i]
particles[:, i] = np.random.uniform(pmin, pmax, self.n_particles)
velocities[:, i] = np.random.uniform(-(pmax-pmin)*0.1, (pmax-pmin)*0.1, self.n_particles)
# 初始化个体最优和全局最优
personal_best = particles.copy()
personal_best_fitness = np.array([objective_func(p) for p in particles])
global_best_idx = np.argmin(personal_best_fitness)
global_best = personal_best[global_best_idx].copy()
global_best_fitness = personal_best_fitness[global_best_idx]
# 迭代优化
for iteration in range(self.n_iterations):
for i in range(self.n_particles):
# 更新速度
r1, r2 = np.random.rand(2)
velocities[i] = (self.w * velocities[i] +
self.c1 * r1 * (personal_best[i] - particles[i]) +
self.c2 * r2 * (global_best - particles[i]))
# 更新位置
particles[i] += velocities[i]
# 边界处理
for j in range(n_params):
pmin, pmax = bounds[j]
particles[i, j] = np.clip(particles[i, j], pmin, pmax)
# 评估适应度
fitness = objective_func(particles[i])
# 更新个体最优
if fitness < personal_best_fitness[i]:
personal_best[i] = particles[i].copy()
personal_best_fitness[i] = fitness
# 更新全局最优
if fitness < global_best_fitness:
global_best = particles[i].copy()
global_best_fitness = fitness
# 记录历史
self.history['best_fitness'].append(global_best_fitness)
self.history['avg_fitness'].append(np.mean(personal_best_fitness))
self.history['best_position'].append(global_best.copy())
if iteration % 10 == 0:
print(f" 迭代 {iteration}: 最佳适应度 = {global_best_fitness:.6f}")
return global_best, global_best_fitness
class GeneticAlgorithm:
"""遗传算法"""
def __init__(self, population_size=50, n_generations=100,
crossover_rate=0.8, mutation_rate=0.1):
"""
初始化GA
Parameters:
-----------
population_size : int
种群大小
n_generations : int
进化代数
crossover_rate : float
交叉概率
mutation_rate : float
变异概率
"""
self.population_size = population_size
self.n_generations = n_generations
self.crossover_rate = crossover_rate
self.mutation_rate = mutation_rate
self.history = {'best_fitness': [], 'avg_fitness': [], 'best_individual': []}
def optimize(self, objective_func, bounds, n_params):
"""
优化
Parameters:
-----------
objective_func : callable
目标函数
bounds : list
参数范围
n_params : int
参数数量
Returns:
--------
best_individual : array
最优个体
best_fitness : float
最优适应度
"""
# 初始化种群
population = np.zeros((self.population_size, n_params))
for i in range(n_params):
pmin, pmax = bounds[i]
population[:, i] = np.random.uniform(pmin, pmax, self.population_size)
# 评估初始种群
fitness = np.array([objective_func(ind) for ind in population])
best_idx = np.argmin(fitness)
best_individual = population[best_idx].copy()
best_fitness = fitness[best_idx]
for generation in range(self.n_generations):
# 选择(锦标赛选择)
new_population = np.zeros_like(population)
for i in range(0, self.population_size, 2):
# 选择两个父代
parent1 = self._tournament_selection(population, fitness)
parent2 = self._tournament_selection(population, fitness)
# 交叉
if np.random.rand() < self.crossover_rate:
child1, child2 = self._crossover(parent1, parent2)
else:
child1, child2 = parent1.copy(), parent2.copy()
# 变异
child1 = self._mutate(child1, bounds)
child2 = self._mutate(child2, bounds)
new_population[i] = child1
if i + 1 < self.population_size:
new_population[i + 1] = child2
population = new_population
fitness = np.array([objective_func(ind) for ind in population])
# 更新最优
current_best_idx = np.argmin(fitness)
if fitness[current_best_idx] < best_fitness:
best_fitness = fitness[current_best_idx]
best_individual = population[current_best_idx].copy()
# 记录历史
self.history['best_fitness'].append(best_fitness)
self.history['avg_fitness'].append(np.mean(fitness))
self.history['best_individual'].append(best_individual.copy())
if generation % 10 == 0:
print(f" 代数 {generation}: 最佳适应度 = {best_fitness:.6f}")
return best_individual, best_fitness
def _tournament_selection(self, population, fitness, tournament_size=3):
"""锦标赛选择"""
selected_idx = np.random.choice(len(population), tournament_size, replace=False)
winner_idx = selected_idx[np.argmin(fitness[selected_idx])]
return population[winner_idx].copy()
def _crossover(self, parent1, parent2):
"""交叉操作"""
alpha = np.random.rand()
child1 = alpha * parent1 + (1 - alpha) * parent2
child2 = (1 - alpha) * parent1 + alpha * parent2
return child1, child2
def _mutate(self, individual, bounds):
"""变异操作"""
for i in range(len(individual)):
if np.random.rand() < self.mutation_rate:
pmin, pmax = bounds[i]
individual[i] += np.random.normal(0, (pmax - pmin) * 0.1)
individual[i] = np.clip(individual[i], pmin, pmax)
return individual
class OptimizationBasedUpdating:
"""基于优化算法的模型修正"""
def __init__(self, model_func):
self.model_func = model_func
def objective_function(self, params, target_frequencies, target_modes=None,
weight_freq=1.0, weight_mac=0.0):
"""
目标函数
Parameters:
-----------
params : array
模型参数
target_frequencies : array
目标频率
target_modes : array
目标模态振型
weight_freq : float
频率权重
weight_mac : float
MAC权重
Returns:
--------
error : float
误差
"""
# 计算当前模态
freqs, modes = self.model_func(params)
# 频率误差
freq_error = np.sum(((freqs[:len(target_frequencies)] - target_frequencies) / target_frequencies) ** 2)
# MAC误差(如果提供了目标模态)
mac_error = 0
if target_modes is not None and weight_mac > 0:
for i in range(min(len(target_modes), len(modes))):
mac = self._compute_mac(target_modes[i], modes[i])
mac_error += (1 - mac) ** 2
return weight_freq * freq_error + weight_mac * mac_error
def _compute_mac(self, phi1, phi2):
"""计算MAC值"""
return np.abs(np.dot(phi1, phi2)) ** 2 / (np.dot(phi1, phi1) * np.dot(phi2, phi2))
def truss_structure_model(params, L=1.0, rho=7850):
"""
桁架结构模型
Parameters:
-----------
params : array
杆件截面积 [A1, A2, A3, ...]
L : float
单元长度
rho : float
材料密度
Returns:
--------
frequencies : array
固有频率
mode_shapes : array
模态振型
"""
n_bars = len(params)
E = 2.1e11 # 弹性模量
# 简化:质量-弹簧系统模拟桁架
n_dof = n_bars + 1
K = np.zeros((n_dof, n_dof))
M = np.zeros((n_dof, n_dof))
for i in range(n_bars):
A = params[i]
k = E * A / L
m = rho * A * L
# 刚度矩阵
K[i, i] += k
K[i, i+1] -= k
K[i+1, i] -= k
K[i+1, i+1] += k
# 质量矩阵(集中质量)
M[i, i] += m / 2
M[i+1, i+1] += m / 2
# 固定边界条件
K_reduced = K[1:, 1:]
M_reduced = M[1:, 1:]
# 求解特征值问题
eigenvalues, eigenvectors = eigh(K_reduced, M_reduced)
eigenvalues = np.maximum(eigenvalues, 1e-10)
frequencies = np.sqrt(eigenvalues) / (2 * np.pi)
# 重构完整模态振型
mode_shapes = np.zeros((n_dof, len(frequencies)))
mode_shapes[1:, :] = eigenvectors
return frequencies[:3], mode_shapes[:, :3]
def case4_optimization_updating():
"""案例4:基于优化算法的模型修正"""
print("="*60)
print("主题062 - 案例4: 基于优化算法的模型修正")
print("="*60)
# 真实参数
A_true = 0.01 # 截面积 (m^2)
n_bars = 5
L = 1.0
rho = 7850
# 真实频率
params_true = np.ones(n_bars) * A_true
f_true, modes_true = truss_structure_model(params_true, L, rho)
print("\n真实模态参数:")
for i, f in enumerate(f_true):
print(f" 第{i+1}阶频率: {f:.3f} Hz")
# 初始参数(有误差的)
np.random.seed(42)
params_initial = A_true * (1 + np.random.uniform(-0.4, 0.4, n_bars))
f_initial, modes_initial = truss_structure_model(params_initial, L, rho)
print("\n初始模型参数:")
for i, p in enumerate(params_initial):
print(f" A{i+1} = {p:.4f} m²")
print("\n初始模型频率:")
for i, f in enumerate(f_initial):
error = (f - f_true[i]) / f_true[i] * 100
print(f" 第{i+1}阶频率: {f:.3f} Hz (误差: {error:.1f}%)")
# 创建优化器
updater = OptimizationBasedUpdating(lambda p: truss_structure_model(p, L, rho))
# 参数范围
bounds = [(0.5*A_true, 1.5*A_true) for _ in range(n_bars)]
# 方法1:梯度优化(L-BFGS-B)
print("\n方法1: L-BFGS-B梯度优化")
def obj_func_grad(p):
return updater.objective_function(p, f_true, weight_freq=1.0)
result_grad = minimize(obj_func_grad, params_initial, method='L-BFGS-B',
bounds=bounds, options={'maxiter': 100})
params_grad = result_grad.x
f_grad, _ = truss_structure_model(params_grad, L, rho)
print("优化后频率:")
for i, f in enumerate(f_grad):
error = (f - f_true[i]) / f_true[i] * 100
print(f" 第{i+1}阶频率: {f:.3f} Hz (误差: {error:.1f}%)")
# 方法2:粒子群优化
print("\n方法2: 粒子群优化(PSO)")
pso = ParticleSwarmOptimization(n_particles=30, n_iterations=50)
def obj_func_pso(p):
return updater.objective_function(p, f_true, weight_freq=1.0)
params_pso, fitness_pso = pso.optimize(obj_func_pso, bounds, n_bars)
f_pso, _ = truss_structure_model(params_pso, L, rho)
print("优化后频率:")
for i, f in enumerate(f_pso):
error = (f - f_true[i]) / f_true[i] * 100
print(f" 第{i+1}阶频率: {f:.3f} Hz (误差: {error:.1f}%)")
# 方法3:遗传算法
print("\n方法3: 遗传算法(GA)")
ga = GeneticAlgorithm(population_size=40, n_generations=50)
params_ga, fitness_ga = ga.optimize(obj_func_pso, bounds, n_bars)
f_ga, _ = truss_structure_model(params_ga, L, rho)
print("优化后频率:")
for i, f in enumerate(f_ga):
error = (f - f_true[i]) / f_true[i] * 100
print(f" 第{i+1}阶频率: {f:.3f} Hz (误差: {error:.1f}%)")
# 可视化
fig, axes = plt.subplots(2, 3, figsize=(15, 10))
# 1. 参数对比
ax = axes[0, 0]
x = np.arange(n_bars)
width = 0.2
ax.bar(x - 1.5*width, params_true/A_true, width, label='真实值', color='green', alpha=0.8)
ax.bar(x - 0.5*width, params_initial/A_true, width, label='初始模型', color='red', alpha=0.8)
ax.bar(x + 0.5*width, params_pso/A_true, width, label='PSO', color='blue', alpha=0.8)
ax.bar(x + 1.5*width, params_ga/A_true, width, label='GA', color='purple', alpha=0.8)
ax.set_xlabel('杆件编号')
ax.set_ylabel('截面积修正系数')
ax.set_title('参数对比')
ax.set_xticks(x)
ax.set_xticklabels([f'A{i+1}' for i in range(n_bars)])
ax.legend(fontsize=8)
ax.grid(True, alpha=0.3, axis='y')
# 2. 频率对比
ax = axes[0, 1]
x = np.arange(3)
ax.bar(x - 1.5*width, f_true, width, label='真实值', color='green', alpha=0.8)
ax.bar(x - 0.5*width, f_initial, width, label='初始模型', color='red', alpha=0.8)
ax.bar(x + 0.5*width, f_pso, width, label='PSO', color='blue', alpha=0.8)
ax.bar(x + 1.5*width, f_ga, width, label='GA', color='purple', alpha=0.8)
ax.set_xlabel('模态阶数')
ax.set_ylabel('频率 (Hz)')
ax.set_title('频率对比')
ax.set_xticks(x)
ax.set_xticklabels([f'第{i+1}阶' for i in range(3)])
ax.legend(fontsize=8)
ax.grid(True, alpha=0.3, axis='y')
# 3. PSO收敛历史
ax = axes[0, 2]
ax.semilogy(pso.history['best_fitness'], 'b-', linewidth=2, label='最佳适应度')
ax.semilogy(pso.history['avg_fitness'], 'r--', linewidth=2, label='平均适应度')
ax.set_xlabel('迭代次数')
ax.set_ylabel('适应度')
ax.set_title('PSO收敛曲线')
ax.legend()
ax.grid(True, alpha=0.3)
# 4. GA收敛历史
ax = axes[1, 0]
ax.semilogy(ga.history['best_fitness'], 'b-', linewidth=2, label='最佳适应度')
ax.semilogy(ga.history['avg_fitness'], 'r--', linewidth=2, label='平均适应度')
ax.set_xlabel('代数')
ax.set_ylabel('适应度')
ax.set_title('GA收敛曲线')
ax.legend()
ax.grid(True, alpha=0.3)
# 5. 误差对比
ax = axes[1, 1]
errors_initial = np.abs((f_initial - f_true) / f_true) * 100
errors_pso = np.abs((f_pso - f_true) / f_true) * 100
errors_ga = np.abs((f_ga - f_true) / f_true) * 100
x = np.arange(3)
ax.bar(x - width, errors_initial, width, label='初始模型', color='red', alpha=0.8)
ax.bar(x, errors_pso, width, label='PSO', color='blue', alpha=0.8)
ax.bar(x + width, errors_ga, width, label='GA', color='purple', alpha=0.8)
ax.set_xlabel('模态阶数')
ax.set_ylabel('相对误差 (%)')
ax.set_title('频率误差对比')
ax.set_xticks(x)
ax.set_xticklabels([f'第{i+1}阶' for i in range(3)])
ax.legend()
ax.grid(True, alpha=0.3, axis='y')
# 6. 方法特点
ax = axes[1, 2]
ax.text(0.5, 0.5, '优化算法特点:\n\n' +
'PSO:\n- 并行搜索\n- 收敛较快\n- 参数较少\n\n' +
'GA:\n- 全局搜索能力强\n- 适合离散问题\n- 计算量较大',
ha='center', va='center', fontsize=10, transform=ax.transAxes)
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
ax.axis('off')
ax.set_title('方法特点对比')
plt.tight_layout()
plt.savefig('optimization_updating.png', dpi=150, bbox_inches='tight')
print("\n优化算法模型修正图已保存: optimization_updating.png")
plt.close()
# 创建动画
fig, axes = plt.subplots(1, 2, figsize=(14, 5))
ax1 = axes[0]
line1, = ax1.plot([], [], 'b-', linewidth=2, label='最佳适应度')
line2, = ax1.plot([], [], 'r--', linewidth=2, label='平均适应度')
ax1.set_xlim(0, len(pso.history['best_fitness']))
ax1.set_ylim(min(pso.history['best_fitness']) * 0.9, max(pso.history['avg_fitness']) * 1.1)
ax1.set_xlabel('迭代次数')
ax1.set_ylabel('适应度')
ax1.set_title('PSO优化过程')
ax1.legend()
ax1.grid(True, alpha=0.3)
ax1.set_yscale('log')
ax2 = axes[1]
line3, = ax2.plot([], [], 'b-', linewidth=2, label='最佳适应度')
line4, = ax2.plot([], [], 'r--', linewidth=2, label='平均适应度')
ax2.set_xlim(0, len(ga.history['best_fitness']))
ax2.set_ylim(min(ga.history['best_fitness']) * 0.9, max(ga.history['avg_fitness']) * 1.1)
ax2.set_xlabel('代数')
ax2.set_ylabel('适应度')
ax2.set_title('GA优化过程')
ax2.legend()
ax2.grid(True, alpha=0.3)
ax2.set_yscale('log')
def animate(frame):
line1.set_data(range(frame+1), pso.history['best_fitness'][:frame+1])
line2.set_data(range(frame+1), pso.history['avg_fitness'][:frame+1])
line3.set_data(range(frame+1), ga.history['best_fitness'][:frame+1])
line4.set_data(range(frame+1), ga.history['avg_fitness'][:frame+1])
return line1, line2, line3, line4
anim = FuncAnimation(fig, animate, frames=min(len(pso.history['best_fitness']),
len(ga.history['best_fitness'])),
interval=200, blit=False)
anim.save('optimization_animation.gif', writer='pillow', fps=5, dpi=100)
print("优化算法动画已保存: optimization_animation.gif")
plt.close()
return updater
if __name__ == "__main__":
updater = case4_optimization_updating()

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 8
8 0
0- 0



 已为社区贡献98条内容
已为社区贡献98条内容

所有评论(0)