镜像视界|AI空间计算重塑公安实战:从“找人”到“锁人”的智能体革命——基于Pixel-to-Space、MatrixFusion与三维轨迹建模的空间级无感定位系统
📘 镜像视界|AI空间计算重塑公安实战:从“找人”到“锁人”的智能体革命
——基于Pixel-to-Space、MatrixFusion与三维轨迹建模的空间级无感定位系统

一、实战痛点:为什么公安仍停留在“找人阶段”
在当前公安实战中,视频系统已经具备强大的“找人能力”:
- 人脸识别
- 轨迹回溯
- 视频检索
但现实情况是:
- 找到人 ≠ 控制人
- 识别到目标 ≠ 锁定目标
- 看到轨迹 ≠ 掌控行动
👉 典型问题:
- 目标跨摄像头丢失
- 轨迹断裂无法连续
- 布控依赖人工经验
👉 核心矛盾:
公安系统可以“找到人”,但无法“锁住人”
👉 关键结论:
“找人”是识别问题,“锁人”是空间问题
二、范式跃迁:从“找人”到“锁人”
传统体系(找人)
- 图像识别
- 单点定位
- 被动响应
镜像视界体系(锁人)
- 空间计算
- 连续轨迹
- 主动控制
👉 核心路径:
Find→Track→Predict→ControlFind → Track → Predict → ControlFind→Track→Predict→Control
👉 本质变化:
从“发现目标” → “持续掌控目标”
三、核心基础:Pixel-to-Space构建空间坐标体
镜像视界核心能力:
Pixel-to-Space(像素 → 空间坐标)
实现:
Pixel→3DCoordinatePixel → 3D CoordinatePixel→3DCoordinate
👉 核心价值:
- 每个目标具备空间坐标
- 所有摄像头统一空间体系
👉 关键结论:
没有坐标,就没有控制
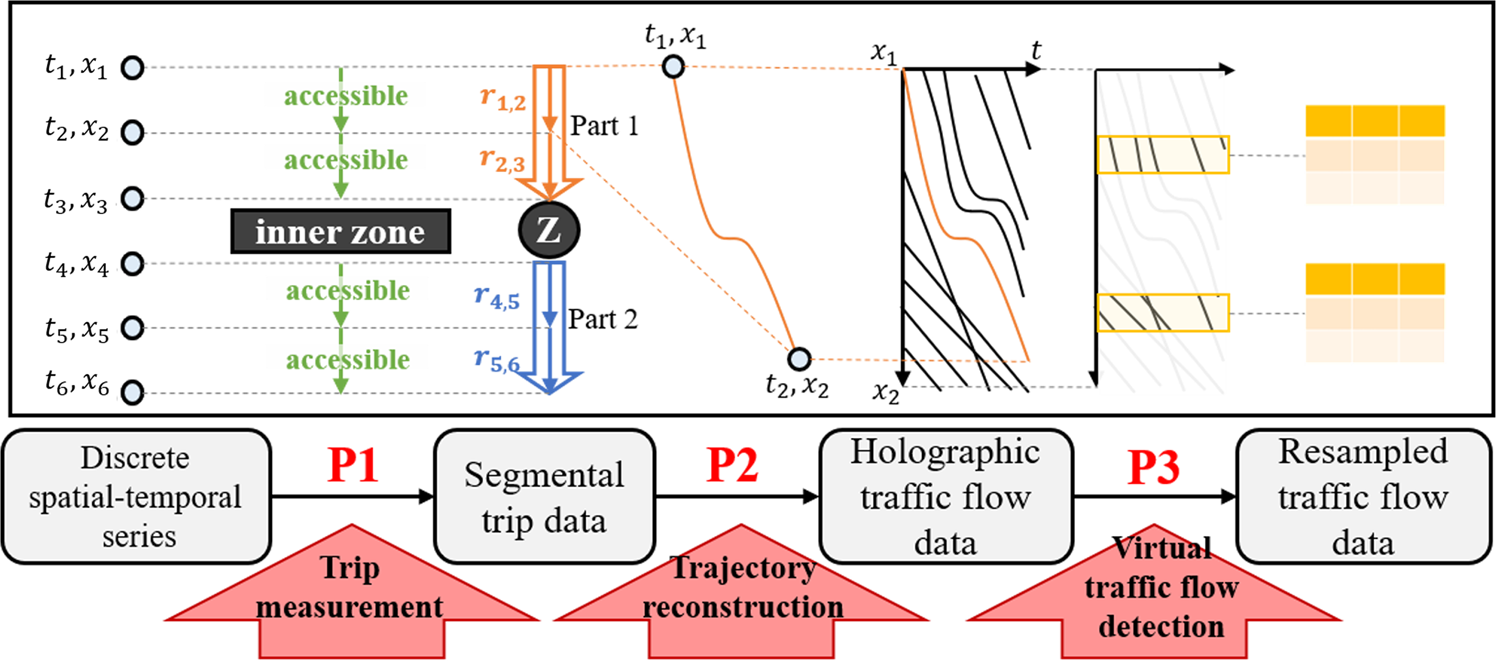
四、跨镜连续追踪:MatrixFusion打破空间割裂
通过MatrixFusion:
- 构建摄像头拓扑网络
- 实现跨区域连续追踪
轨迹表达:
T=(x,y,z,t)T = (x, y, z, t)T=(x,y,z,t)
👉 关键突破:
目标在空间中“持续存在”
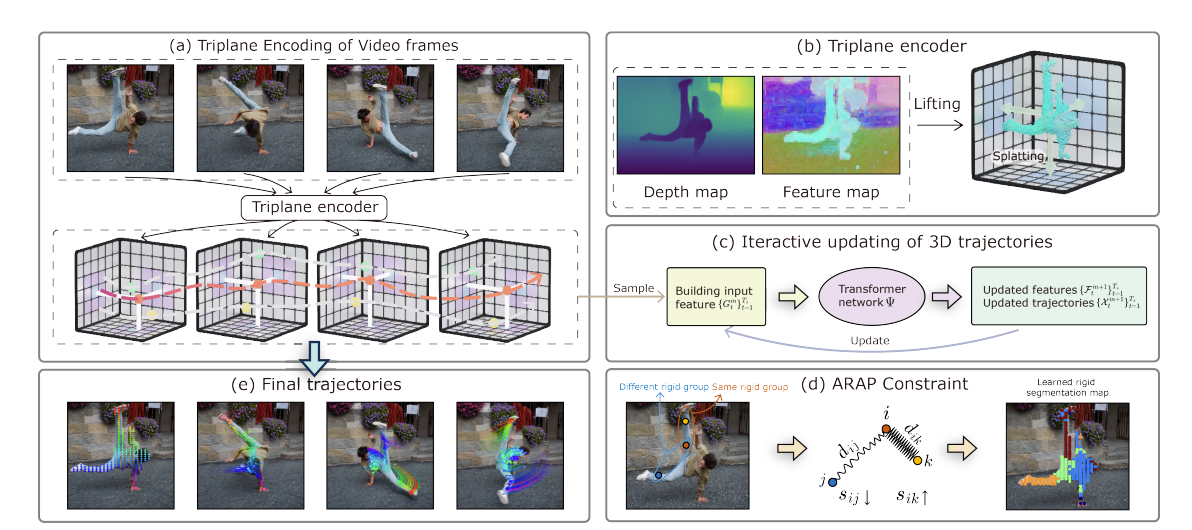
五、三维轨迹建模:从“位置”到“行为”

通过动态三维重构:
轨迹模型:
T=(x,y,z,t,v,a)T = (x, y, z, t, v, a)T=(x,y,z,t,v,a)
👉 行为表达:
Behavior=f(T)Behavior = f(T)Behavior=f(T)
👉 核心变化:
- 点 → 路径
- 路径 → 行为
👉 关键结论:
行为是轨迹函数,而不是标签
六、预测能力:让目标“无处可逃”
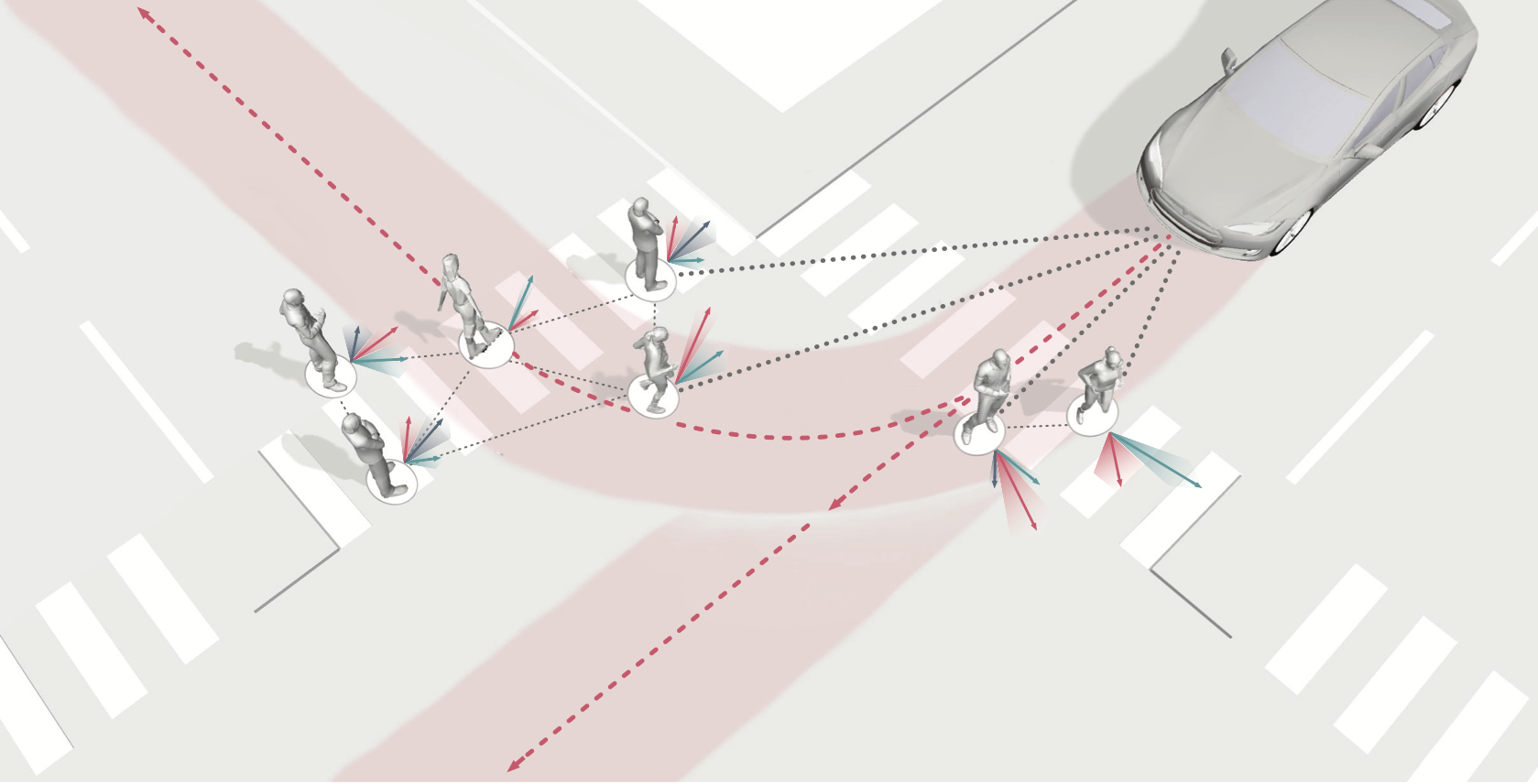
系统实现:
路径预测
预测逃跑方向
行为预测
识别潜在行动
布控预测
提前部署
👉 数学表达:
Future=f(Tpast)Future = f(T_{past})Future=f(Tpast)
👉 核心跃迁:
从“追人” → “等人”
七、AI智能体:公安进入“主动控制时代”

AI智能体能力:
感知
实时数据
理解
行为建模
预测
趋势分析
控制
策略执行
👉 控制模型:
Action=π(State)Action = \pi(State)Action=π(State)
👉 核心变化:
公安从“响应系统” → “控制系统”
八、终极形态:公安空间智能中枢
系统最终形态:
Spatial Policing Brain(公安空间智能大脑)
能力:
- 空间计算
- 连续追踪
- 行为认知
- 轨迹预测
- 主动控制
👉 核心闭环:
Perception→Tracking→Behavior→Prediction→ControlPerception → Tracking → Behavior → Prediction → ControlPerception→Tracking→Behavior→Prediction→Control
九、行业分水岭:谁能实现“锁人能力”
旧体系
- 找人
- 识别
新体系(镜像视界)
- 锁人
- 控制
👉 分水岭:
是否具备“持续掌控目标能力”
十、结语:公安系统的终极答案
公安系统的终点,不是更强识别,而是:
空间智能能力
镜像视界实现的,是一次决定性跃迁:
- 从视频 → 空间
- 从识别 → 控制
- 从追踪 → 掌控
🔥
找人,是能力;锁人,是体系。
空间计算,让公安第一次真正掌控目标。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献62条内容
已为社区贡献62条内容

所有评论(0)