隐式MPC、自适应MPC、时变MPC三种时变模型预测控制仿真(带参考文档)
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
📖
🔥 内容介绍
一、模型预测控制(MPC)基础
模型预测控制是一种基于模型的先进控制策略,广泛应用于工业过程控制等领域。其核心思想是利用系统的预测模型,在每个采样时刻预测系统未来的输出,通过优化一个性能指标来计算当前时刻的最优控制输入。
-
预测模型:对于线性时变系统(单入单出),传递函数描述了系统输入与输出之间的动态关系。在 MPC 中,这个传递函数模型用于预测系统在未来多个时刻的输出。例如,已知当前时刻的输入和系统的传递函数,可推算出未来若干步的输出值。
-
滚动优化:MPC 在每个采样时刻求解一个有限时域的优化问题。优化目标通常是使系统输出尽可能跟踪参考轨迹,同时满足系统的各种约束条件,如输入输出的幅值限制等。通过不断滚动优化,即每到一个新的采样时刻,基于当前的系统状态重新求解优化问题,确定新的控制输入,从而实现对系统的实时控制。
-
反馈校正:考虑到模型误差和外界干扰等因素,MPC 利用实际输出与预测输出之间的偏差来校正预测模型,使后续的预测更加准确,增强系统的鲁棒性。
二、隐式 MPC 原理
-
隐式求解优化问题:在传统 MPC 中,优化问题通常是显式求解,即直接通过数值算法求解优化问题得到控制输入。而隐式 MPC 采用隐式的方式求解优化问题。具体来说,它通过建立优化问题的必要条件(如 KKT 条件),将优化问题转化为一组非线性方程。这些方程隐式地定义了控制输入与系统状态、参考轨迹等之间的关系。
-
优势:隐式 MPC 的优点在于其计算效率较高,特别是对于一些复杂的优化问题。由于避免了直接求解优化问题,而是求解相对简单的非线性方程组,在某些情况下可以减少计算量,更适合实时性要求较高的应用场景。同时,隐式 MPC 对于系统的动态变化具有较好的适应性,能够在一定程度上处理模型的不确定性。
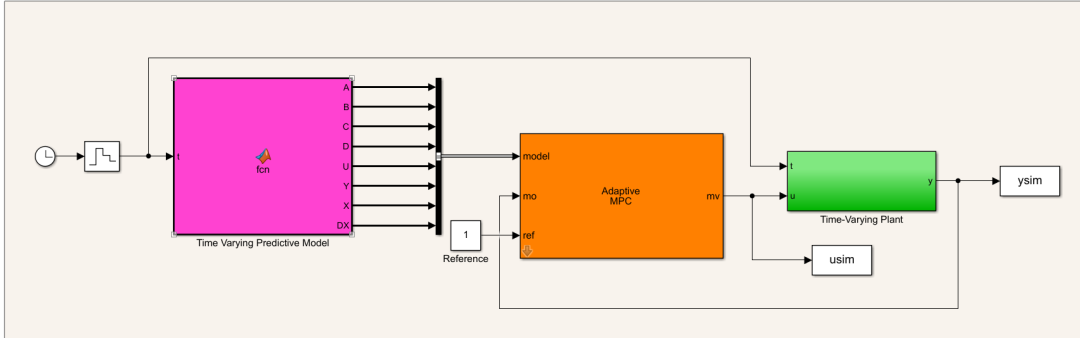
三、自适应 MPC 原理
-
自适应机制:自适应 MPC 旨在根据系统运行过程中的变化,自动调整控制器的参数,以适应系统动态特性的改变。对于线性时变系统,系统的传递函数可能随时间变化,自适应 MPC 能够实时估计系统的参数,从而更新预测模型。例如,通过在线辨识算法,利用系统的输入输出数据不断估计传递函数中的参数。
-
参数调整与优化:一旦系统参数发生变化,自适应 MPC 会相应地调整优化问题中的预测模型和性能指标等参数。这样,在系统动态特性改变时,MPC 仍然能够保持较好的控制性能,使系统输出稳定跟踪参考轨迹。自适应 MPC 能够提高系统对时变特性的适应能力,减少因模型参数变化导致的控制性能下降。
四、时变 MPC 原理
-
考虑时变特性:时变 MPC 专门针对线性时变系统设计,充分考虑系统传递函数随时间的变化。与自适应 MPC 不同,时变 MPC 可能不需要在线辨识系统参数,而是直接利用已知的时变规律来构建预测模型。例如,如果已知系统传递函数按照某种预定的函数形式随时间变化,时变 MPC 可以直接将这种时变关系纳入预测模型。
-
优化与控制:在滚动优化过程中,时变 MPC 根据时变的预测模型预测系统未来输出,并求解优化问题得到控制输入。由于准确考虑了系统的时变特性,时变 MPC 在处理线性时变系统时能够提供更精确的控制,使系统在时变环境下保持良好的性能。
📖
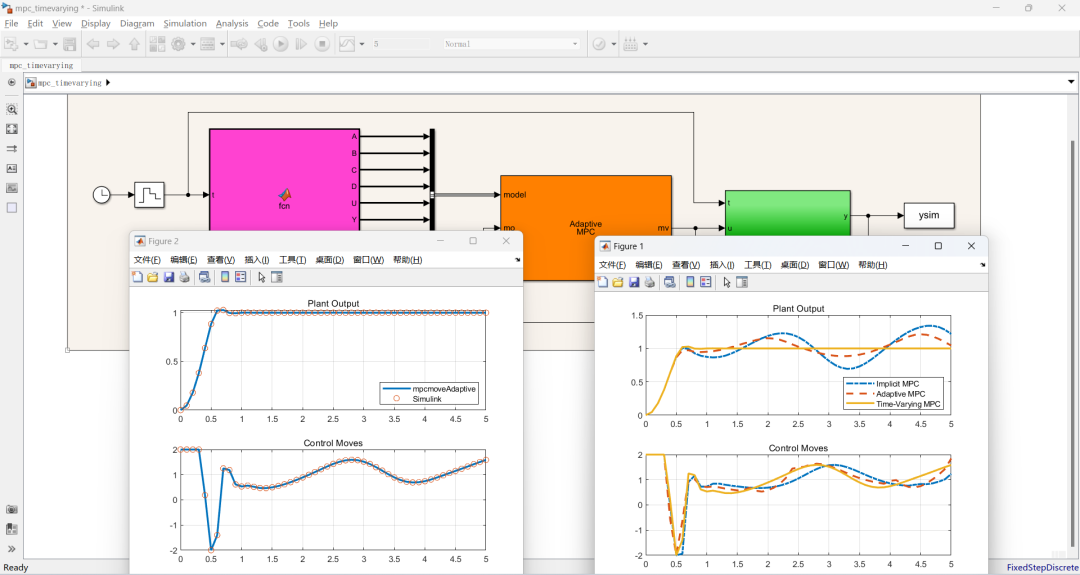
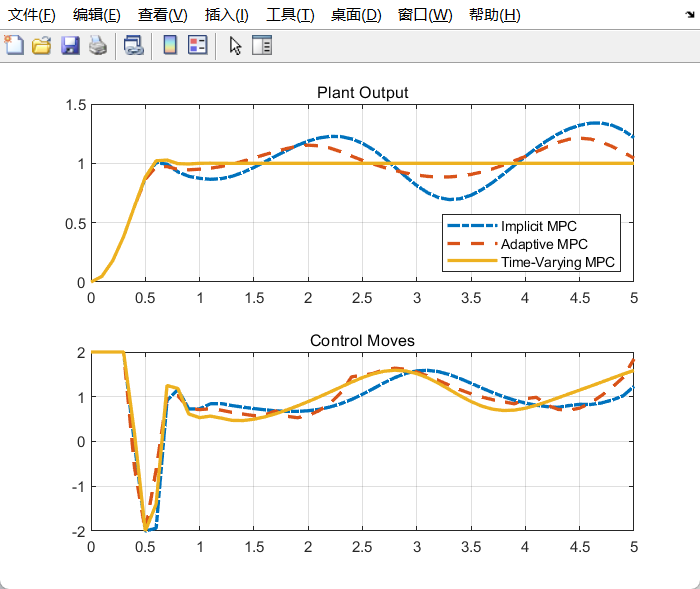
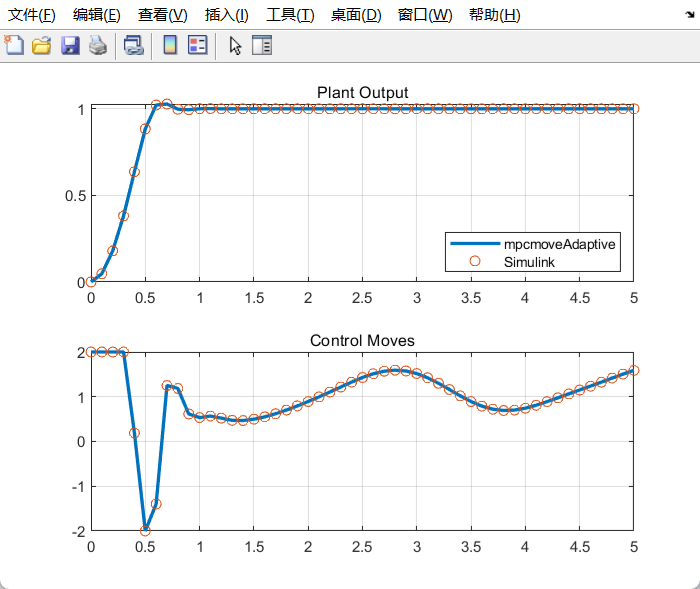
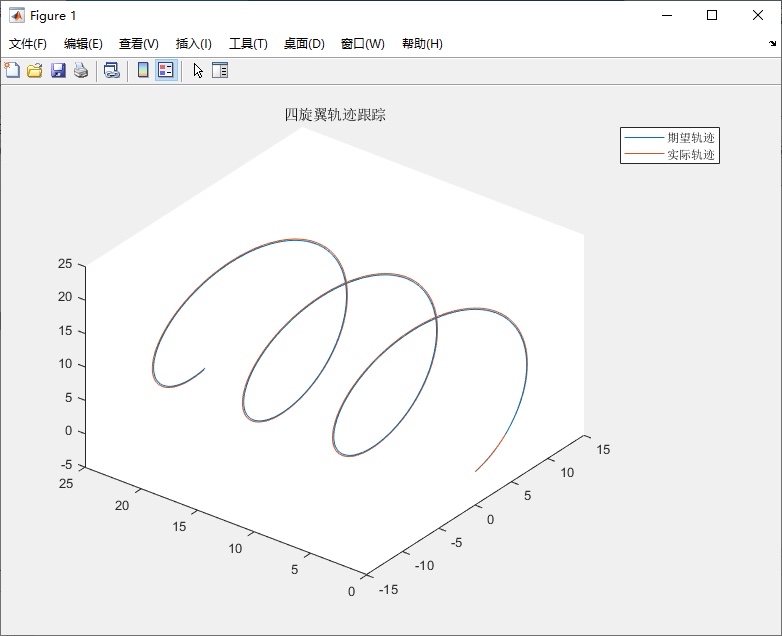
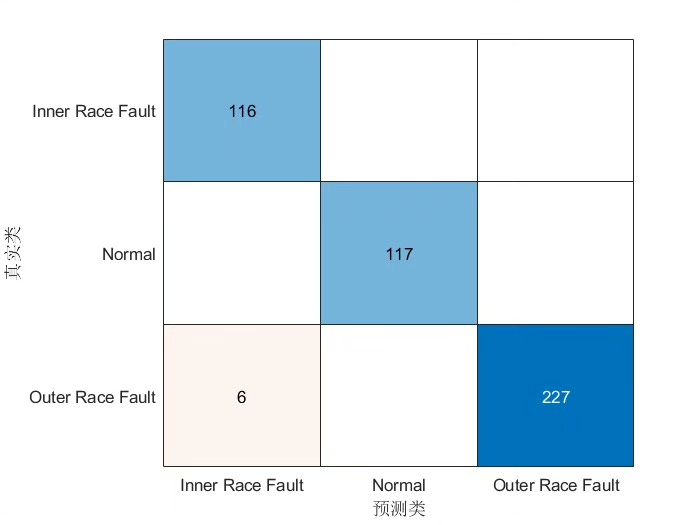
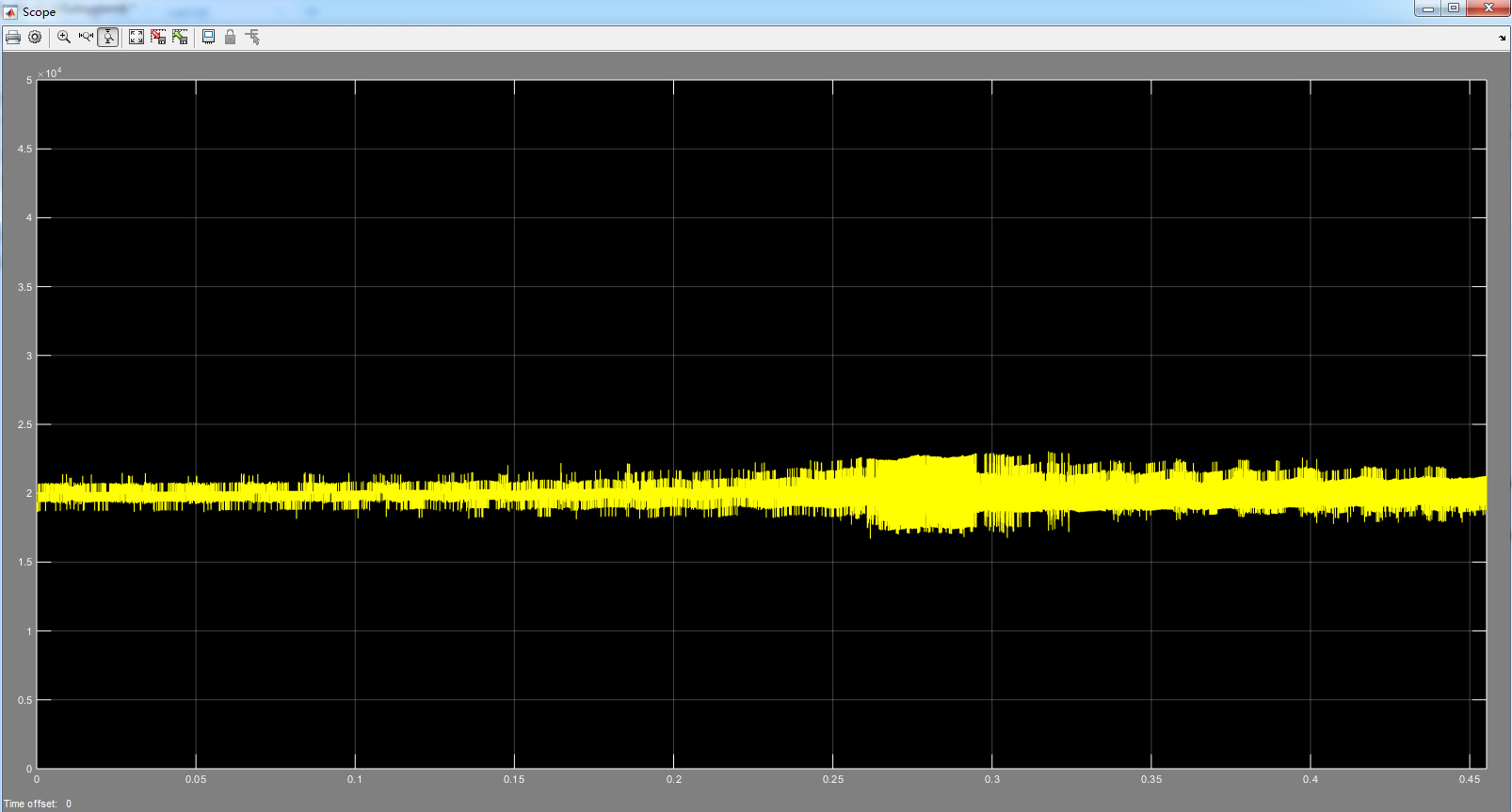
⛳️ 运行结果
📖
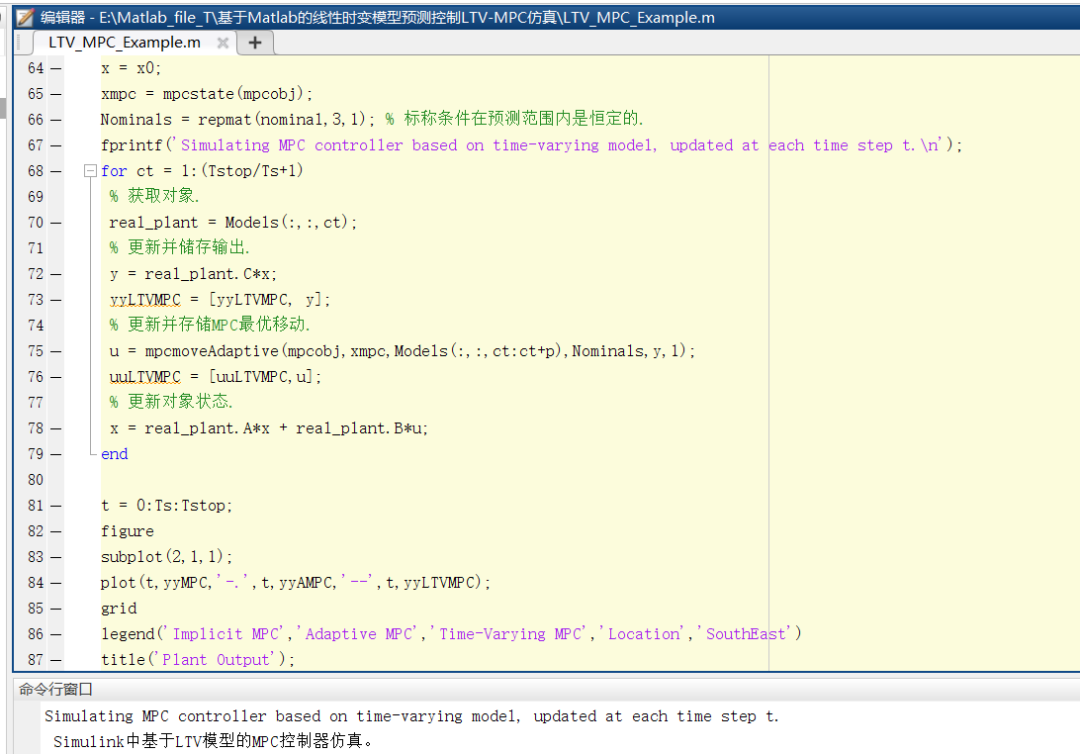
📣 部分代码
📖
🔗 参考文献
📖
🍅往期回顾扫扫下方二维码
📖
🌿 往期回顾可以关注主页,点击搜索

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 4
4 0
0- 0



 已为社区贡献34条内容
已为社区贡献34条内容

所有评论(0)