探索四旋翼PID控制仿真模型:Matlab实现与应用
四旋翼PID控制仿真模型 matlab仿真程序,支持姿态单独控制,阶跃信号,方波,正弦波直接输入姿态环,波形完美,可以选择接入位置环,定点控制,轨迹跟踪,一键切换轨迹等功能。 带公式推导文档
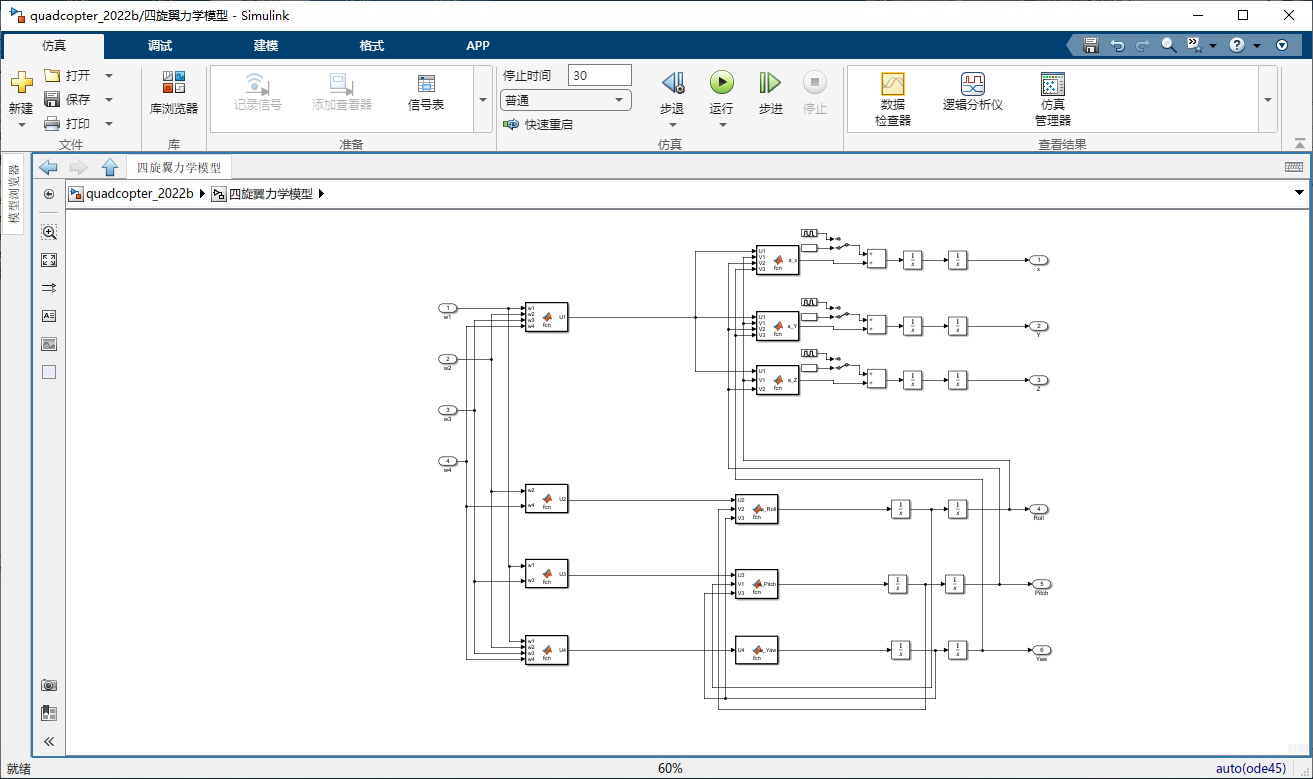
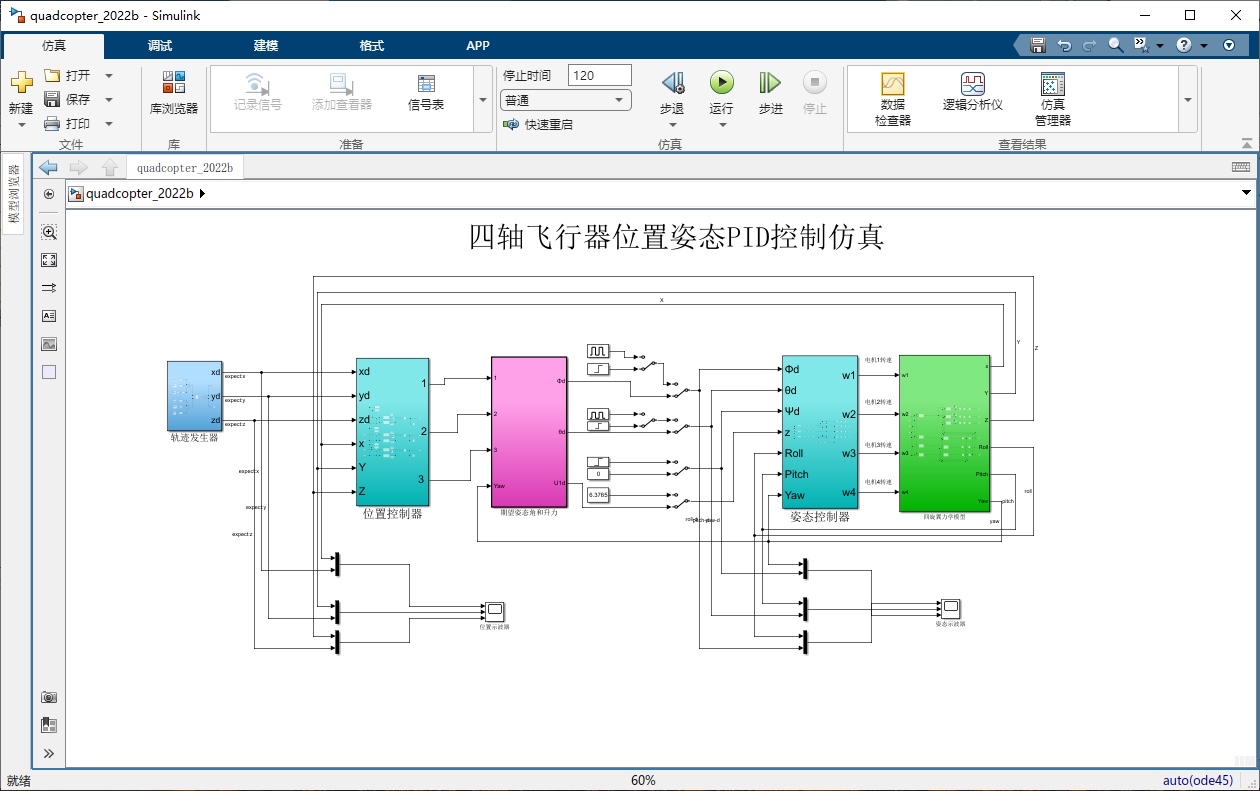
在飞行器控制领域,四旋翼飞行器因其灵活性和广泛的应用前景备受关注。而PID控制作为经典且有效的控制策略,在四旋翼飞行器的姿态与位置控制中发挥着关键作用。今天就来给大家分享一个超赞的四旋翼PID控制仿真模型,基于Matlab实现,功能强大到超乎想象。
一、Matlab仿真程序概述
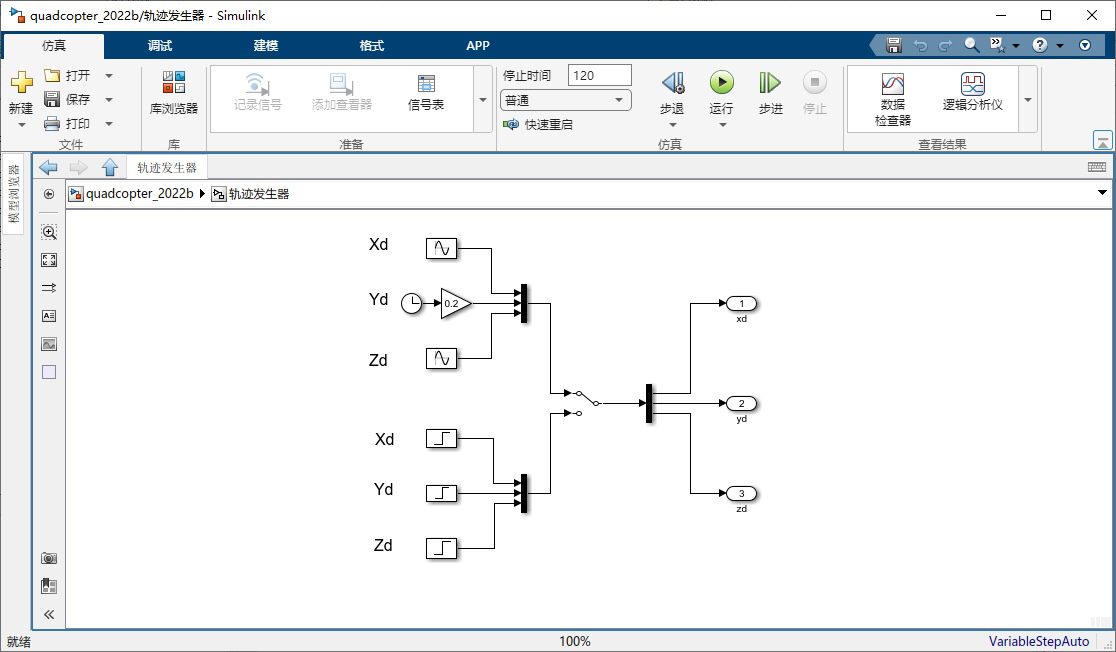
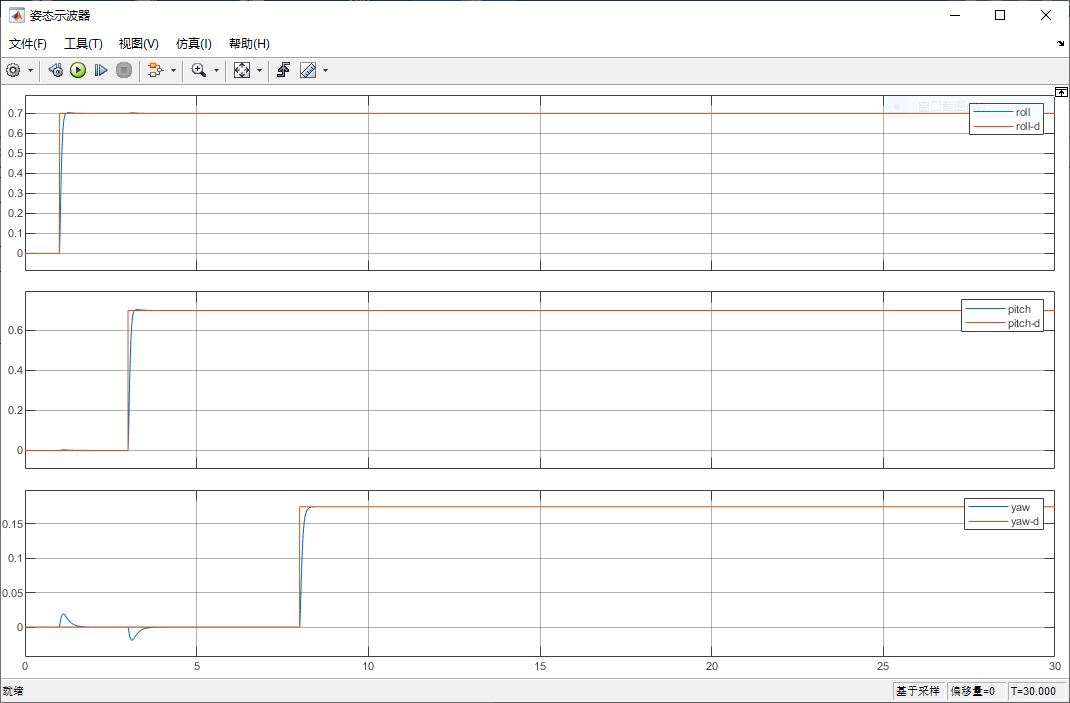
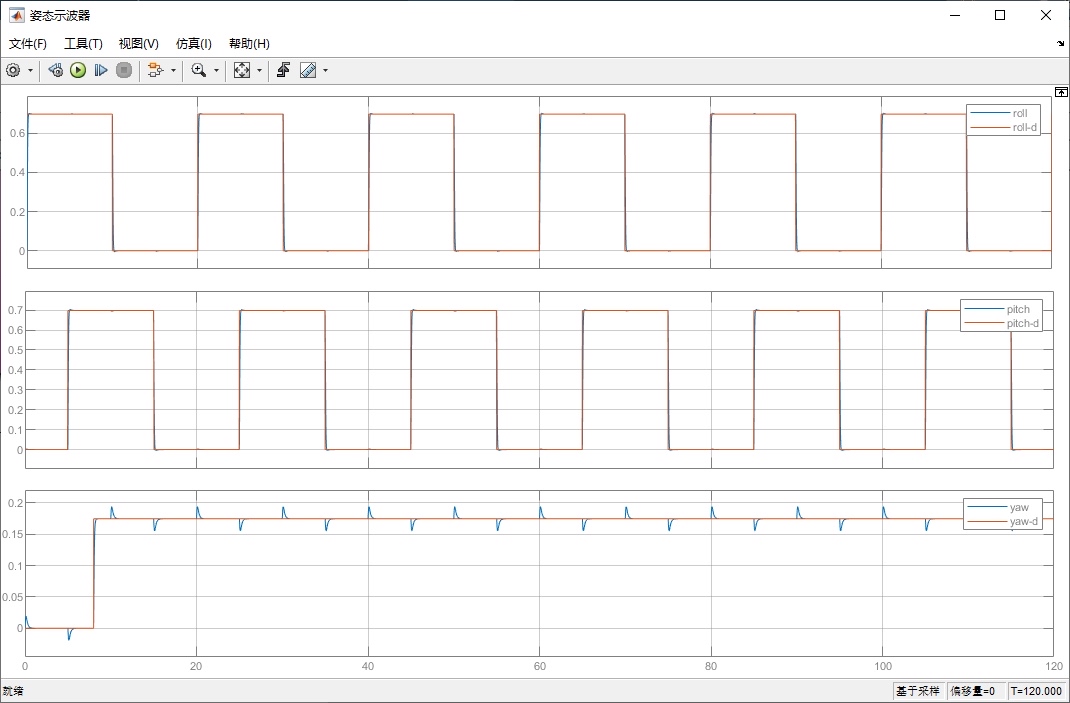
这个仿真程序的一大亮点是支持姿态单独控制。无论是阶跃信号、方波还是正弦波,都能直接输入到姿态环,并且呈现出完美的波形。同时,它还提供了接入位置环的选项,从而实现定点控制、轨迹跟踪,甚至一键切换轨迹等实用功能。
1. 姿态单独控制代码示例
以阶跃信号输入姿态环为例,假设我们控制四旋翼的俯仰角(pitch)。以下是简化的Matlab代码:
% 定义仿真时间
t = 0:0.01:10;
% 阶跃信号幅值
step_amplitude = 10;
% 生成阶跃信号作为期望俯仰角
desired_pitch = step_amplitude * ones(size(t));
% 初始化实际俯仰角
actual_pitch = zeros(size(t));
% 假设的PID参数
kp = 2;
ki = 0.5;
kd = 0.1;
integral = 0;
prev_error = 0;
for i = 2:length(t)
error = desired_pitch(i) - actual_pitch(i - 1);
integral = integral + error * 0.01;
derivative = (error - prev_error) / 0.01;
control_signal = kp * error + ki * integral + kd * derivative;
% 这里简单假设控制信号直接影响实际俯仰角,实际情况更复杂
actual_pitch(i) = actual_pitch(i - 1) + control_signal * 0.01;
prev_error = error;
end
figure;
subplot(2,1,1);
plot(t, desired_pitch);
title('期望俯仰角');
xlabel('时间(s)');
ylabel('角度(°)');
subplot(2,1,2);
plot(t, actual_pitch);
title('实际俯仰角');
xlabel('时间(s)');
ylabel('角度(°)');代码分析:首先,我们定义了仿真时间t和阶跃信号幅值stepamplitude,生成了期望的俯仰角信号desiredpitch。然后初始化实际俯仰角actualpitch为0。接着设置了PID控制器的参数kp(比例系数)、ki(积分系数)和kd(微分系数)。在循环中,计算误差error,并根据PID控制原理更新积分项integral和微分项derivative,进而得到控制信号controlsignal。这里为了简化,假设控制信号直接影响实际俯仰角(实际中需要考虑四旋翼的动力学模型)。最后,通过绘图直观展示期望俯仰角和实际俯仰角的变化。
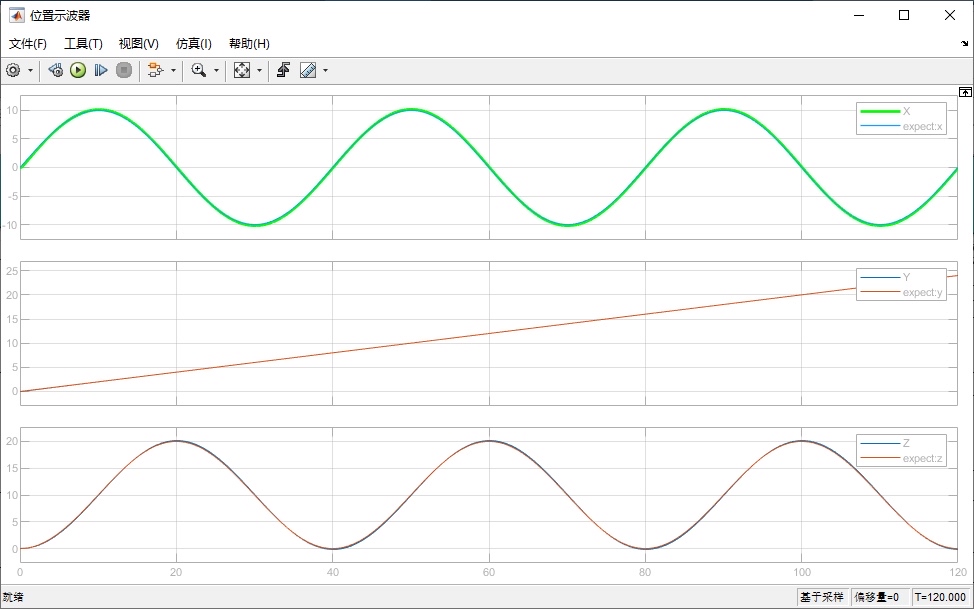
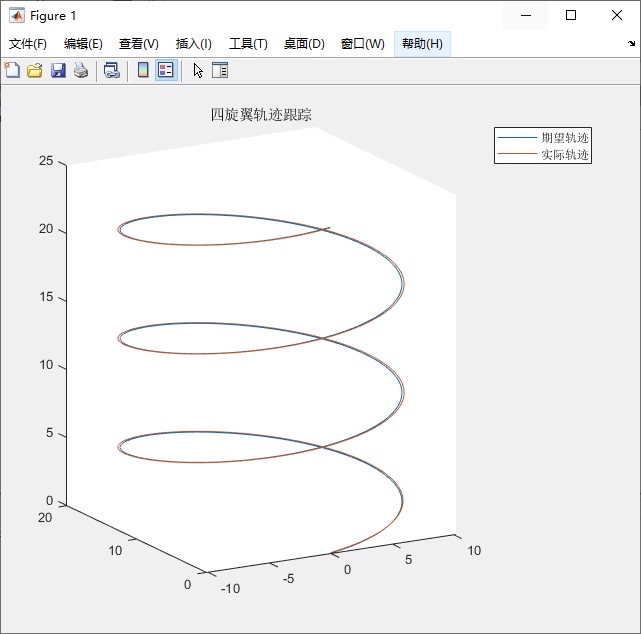
2. 位置环接入与轨迹跟踪
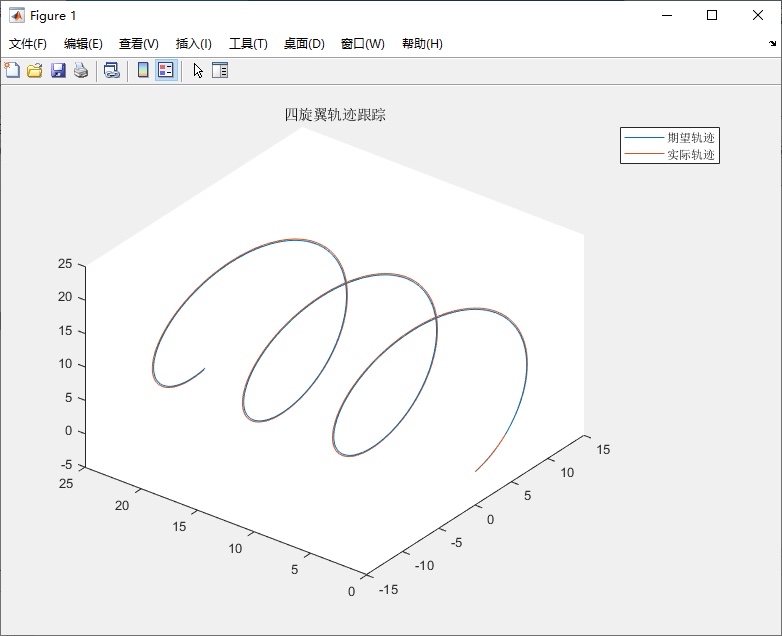
当接入位置环实现轨迹跟踪时,情况会稍微复杂一些。假设我们要跟踪一个正弦轨迹。
% 定义仿真时间
t = 0:0.01:20;
% 正弦轨迹参数
amplitude = 2;
frequency = 0.1;
% 生成正弦轨迹作为期望位置
desired_position = amplitude * sin(2 * pi * frequency * t);
% 初始化实际位置
actual_position = zeros(size(t));
% 位置环PID参数
kp_pos = 3;
ki_pos = 0.8;
kd_pos = 0.2;
integral_pos = 0;
prev_error_pos = 0;
for i = 2:length(t)
error_pos = desired_position(i) - actual_position(i - 1);
integral_pos = integral_pos + error_pos * 0.01;
derivative_pos = (error_pos - prev_error_pos) / 0.01;
control_signal_pos = kp_pos * error_pos + ki_pos * integral_pos + kd_pos * derivative_pos;
% 简单假设控制信号影响实际位置
actual_position(i) = actual_position(i - 1) + control_signal_pos * 0.01;
prev_error_pos = error_pos;
end
figure;
plot(t, desired_position, 'b', 'LineWidth',1.5);
hold on;
plot(t, actual_position, 'r--', 'LineWidth',1.5);
legend('期望位置', '实际位置');
title('正弦轨迹跟踪');
xlabel('时间(s)');
ylabel('位置(m)');代码分析:这段代码中,我们首先定义了正弦轨迹的幅值amplitude和频率frequency,生成期望位置信号desiredposition。同样初始化实际位置actualposition。接着设置位置环的PID参数kppos、kipos和kdpos。在循环中,按照PID控制计算误差errorpos,更新积分项integralpos和微分项derivativepos,得到控制信号controlsignalpos,并更新实际位置。绘图部分将期望位置和实际位置同时展示,方便观察跟踪效果。
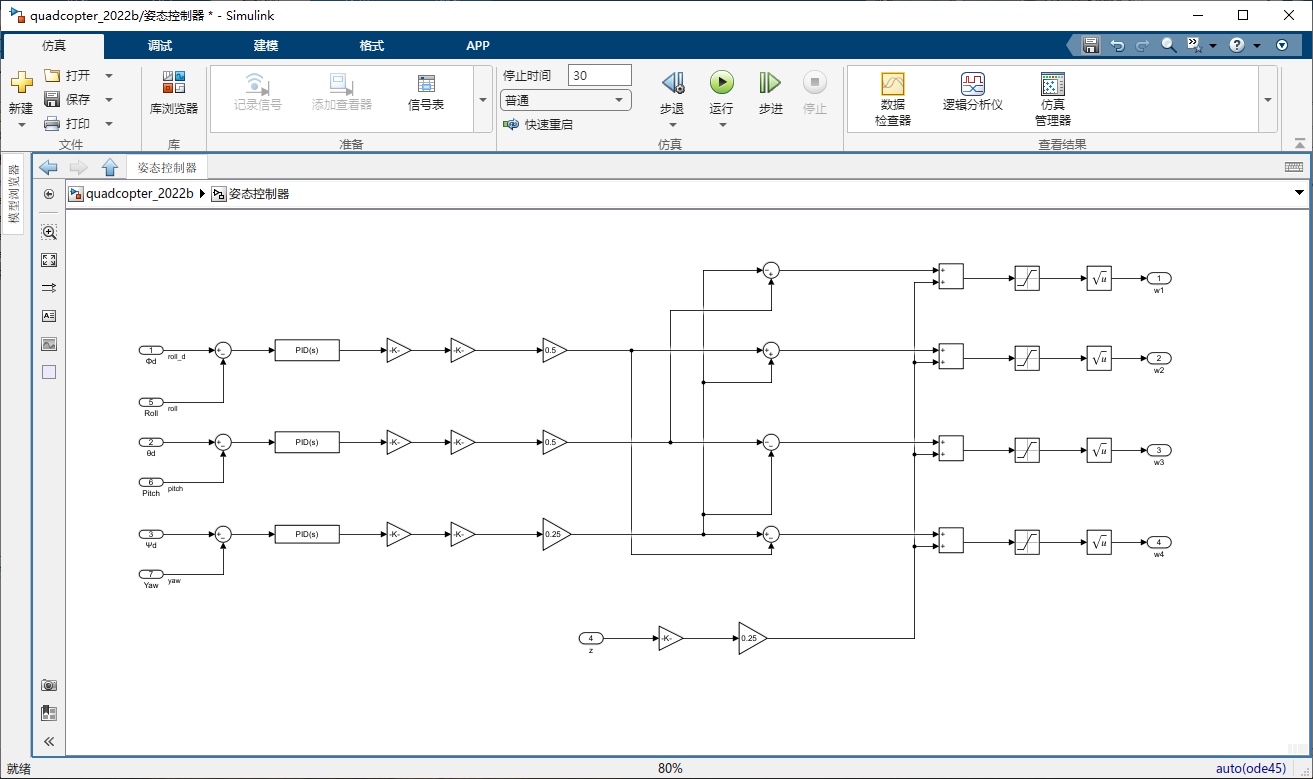
二、公式推导文档的重要性
该模型还带有公式推导文档,这是理解整个控制原理的关键。在PID控制中,控制信号$u(t)$的基本公式为:
\[u(t)=Kp e(t)+Ki \int{0}^{t} e(\tau)d\tau+Kd \frac{de(t)}{dt}\]
四旋翼PID控制仿真模型 matlab仿真程序,支持姿态单独控制,阶跃信号,方波,正弦波直接输入姿态环,波形完美,可以选择接入位置环,定点控制,轨迹跟踪,一键切换轨迹等功能。 带公式推导文档
其中,$Kp$是比例系数,$Ki$是积分系数,$K_d$是微分系数,$e(t)$是误差信号,即期望输出与实际输出的差值。通过对四旋翼飞行器的动力学模型进行深入分析和数学推导,我们可以得到适用于姿态控制和位置控制的具体PID参数设置依据。这个公式推导文档详细阐述了从飞行器的物理模型到PID控制参数确定的全过程,对于深入理解和优化控制算法至关重要。
总之,这个四旋翼PID控制仿真模型无论是对于研究飞行器控制的学者,还是想要实践PID控制算法的工程师,都是一个非常有价值的资源。它不仅提供了功能丰富的Matlab仿真程序,还有详细的公式推导文档辅助理解,相信能帮助大家在相关领域取得更多成果。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 3
3 0
0- 0



 已为社区贡献37条内容
已为社区贡献37条内容

所有评论(0)