永磁同步电机参数辨识:从离线到在线的探索
永磁同步电机,表贴式,参数在线辨识,扭矩观测,离线辨识等等模型 #电机参数辨识
在电机控制领域,永磁同步电机(PMSM)凭借其高效、高功率密度等优点,广泛应用于电动汽车、工业伺服系统等众多领域。而准确获取电机参数对于实现高性能的电机控制至关重要,其中表贴式永磁同步电机的参数辨识更是研究热点,今天咱就来唠唠其中的离线辨识和在线辨识,以及与之紧密相关的扭矩观测。
一、永磁同步电机基础知识
表贴式永磁同步电机,其永磁体粘贴在转子表面,结构相对简单。在dq旋转坐标系下,其电压方程可表示为:
\[
\begin{cases}
ud = Rsid + Ld\frac{did}{dt} - \omegaeLqiq \\
uq = Rsiq + Lq\frac{diq}{dt} + \omegae(Ldid + \psi_f)
\end{cases}
永磁同步电机,表贴式,参数在线辨识,扭矩观测,离线辨识等等模型 #电机参数辨识
\]
其中,$ud$、$uq$ 分别为 d 轴和 q 轴电压,$id$、$iq$ 为 d 轴和 q 轴电流,$Rs$ 是定子电阻,$Ld$、$Lq$ 为 d 轴和 q 轴电感,$\omegae$ 是电角速度,$\psi_f$ 是永磁体磁链。从这组方程可以看出,电机的运行特性与这些参数密切相关。
二、离线辨识模型
离线辨识是在电机静止或特定的非运行状态下进行参数测定。
定子电阻 $R_s$ 的离线辨识
通常采用直流注入法。给电机的一相绕组通入直流电流 $I{dc}$,测量该相绕组两端的电压 $U{dc}$,根据欧姆定律 $Rs = \frac{U{dc}}{I_{dc}}$ 即可得到定子电阻。代码实现思路大概如下(以Python为例):
# 假设已经获取到测量的直流电压和电流
U_dc = 10.0 # 假设测量得到的直流电压值
I_dc = 2.0 # 假设测量得到的直流电流值
R_s = U_dc / I_dc
print(f"定子电阻 R_s 的值为: {R_s} 欧姆")这段代码很简单,就是将测量得到的直流电压和电流值代入公式计算出定子电阻。
电感 $L_d$、$L_q$ 的离线辨识
一般使用脉冲响应法。给电机施加一个窄脉冲电压,通过检测电流响应来计算电感值。具体实现较为复杂,这里只给出大致代码框架:
# 模拟获取脉冲电压施加后的电流响应数据
current_response = [1.2, 1.5, 1.8, 2.0, 1.9, 1.7] # 假设的电流响应数据列表
# 这里需要根据具体的电流响应计算电感值,不同的算法公式不同
# 假设这里使用简单的一阶响应计算电感
# 具体公式需根据实际物理模型确定,这里只是示意
L = calculate_inductance(current_response)
def calculate_inductance(response):
# 这里简单假设根据电流响应的起始和峰值计算电感
start_current = response[0]
peak_current = max(response)
# 假设的简单计算电感公式
inductance = (peak_current - start_current) / some_constant
return inductance
print(f"电感 L 的值为: {L} 亨")这里的代码只是一个示意,实际中要根据具体的物理模型和算法来准确计算电感值。
离线辨识的优点是精度较高,但是它需要电机停止运行,在实际应用中可能不太方便,特别是对于一些连续运行的系统。
三、在线辨识模型
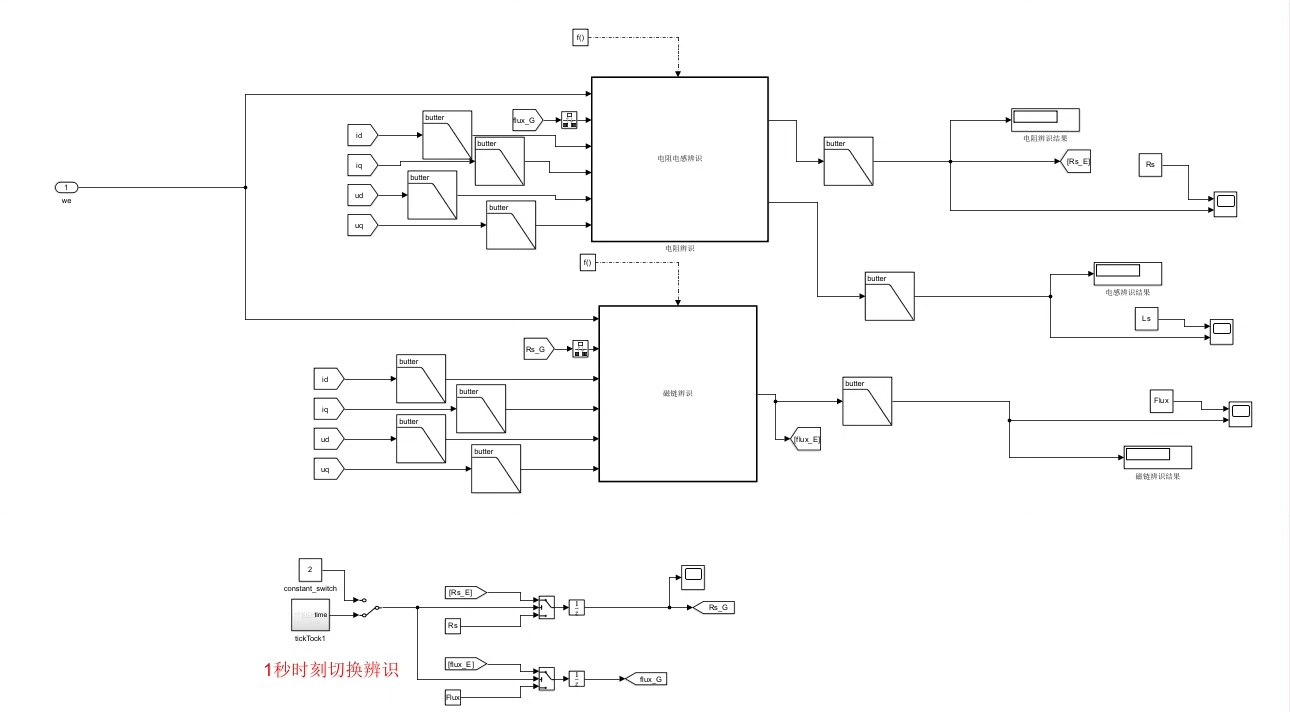
为了克服离线辨识的局限性,在线辨识应运而生。在线辨识允许电机在运行过程中实时估计参数。
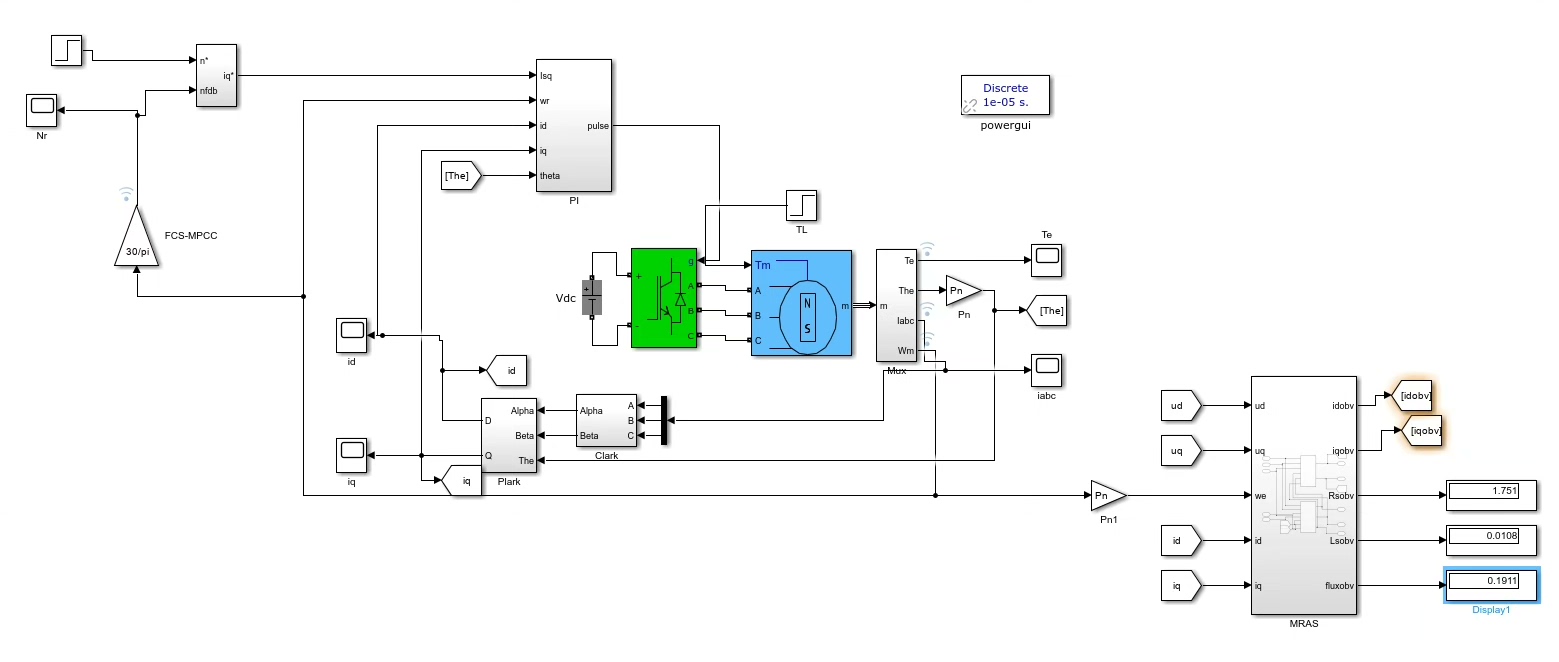
基于模型参考自适应系统(MRAS)的在线辨识
MRAS 方法将电机的实际模型作为参考模型,估计模型作为可调模型。通过两者输出的误差来调整可调模型的参数,使其逐渐逼近实际模型的参数。以下是一个简单的 MRAS 算法代码示例(以MATLAB为例,仅为核心部分示意):
% 初始化参数
alpha = 0.1; % 自适应率
Rs_hat = 1.0; % 定子电阻初始估计值
Ld_hat = 0.01; % d轴电感初始估计值
Lq_hat = 0.01; % q轴电感初始估计值
% 在电机运行过程中循环更新参数估计值
for k = 1:num_samples
% 获取当前时刻的电压、电流等测量值
u_d = measured_voltages(k, 1);
u_q = measured_voltages(k, 2);
i_d = measured_currents(k, 1);
i_q = measured_currents(k, 2);
omega_e = measured_speed(k);
% 参考模型输出计算
y_ref = reference_model(u_d, u_q, i_d, i_q, omega_e);
% 可调模型输出计算
y_hat = adjustable_model(u_d, u_q, i_d, i_q, omega_e, Rs_hat, Ld_hat, Lq_hat);
% 计算误差
error = y_ref - y_hat;
% 根据误差更新参数估计值
Rs_hat = Rs_hat + alpha * error * i_d;
Ld_hat = Ld_hat + alpha * error * (-omega_e * i_q);
Lq_hat = Lq_hat + alpha * error * (omega_e * i_d);
end
function y = reference_model(u_d, u_q, i_d, i_q, omega_e)
% 根据实际电机模型计算参考模型输出
y(1) = u_d - Rs * i_d + omega_e * Lq * i_q;
y(2) = u_q - Rs * i_q - omega_e * Ld * i_d - omega_e * psi_f;
end
function y = adjustable_model(u_d, u_q, i_d, i_q, omega_e, Rs_hat, Ld_hat, Lq_hat)
% 根据估计模型计算可调模型输出
y(1) = u_d - Rs_hat * i_d + omega_e * Lq_hat * i_q;
y(2) = u_q - Rs_hat * i_q - omega_e * Ld_hat * i_d - omega_e * psi_f_hat;
end在这个代码中,我们通过不断获取电机运行时的电压、电流和转速等测量值,计算参考模型和可调模型的输出误差,然后根据自适应率来更新参数估计值。这样就可以在电机运行过程中实时地估计电机参数。
在线辨识虽然能够实时跟踪参数变化,但由于电机运行环境复杂,存在噪声等干扰因素,其精度可能会受到一定影响。
四、扭矩观测
准确观测电机扭矩对于电机性能评估和控制也非常重要。在已知电机参数的情况下,可以通过以下公式计算扭矩:
\[Te = \frac{3}{2}p[\psifiq + (Ld - Lq)idi_q]\]
其中 $p$ 是电机极对数。结合前面辨识得到的参数,就可以在电机运行过程中实时观测扭矩。代码实现如下(以Python为例):
# 假设已经辨识得到的参数
p = 4 # 极对数
psi_f = 0.1 # 永磁体磁链
L_d = 0.01 # d轴电感
L_q = 0.012 # q轴电感
# 假设获取到的当前 d 轴和 q 轴电流
i_d = 1.5
i_q = 2.0
T_e = (3/2) * p * (psi_f * i_q + (L_d - L_q) * i_d * i_q)
print(f"当前电机扭矩 T_e 为: {T_e} 牛米")通过这样的计算,我们就能实时了解电机输出扭矩的情况,为电机控制策略的调整提供依据。
永磁同步电机表贴式的参数辨识,无论是离线还是在线方式,都各有优劣,在实际应用中需要根据具体场景选择合适的方法。而扭矩观测则是基于准确的参数辨识,为电机性能优化提供有力支持。希望通过今天的分享,能让大家对这一块有更清晰的认识,在实际项目中能更好地应用。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献155条内容
已为社区贡献155条内容

所有评论(0)