(simscape 建模版)伺服系统基于陷波滤波器双惯量伺服系统机械谐振抑制matlab/Si...
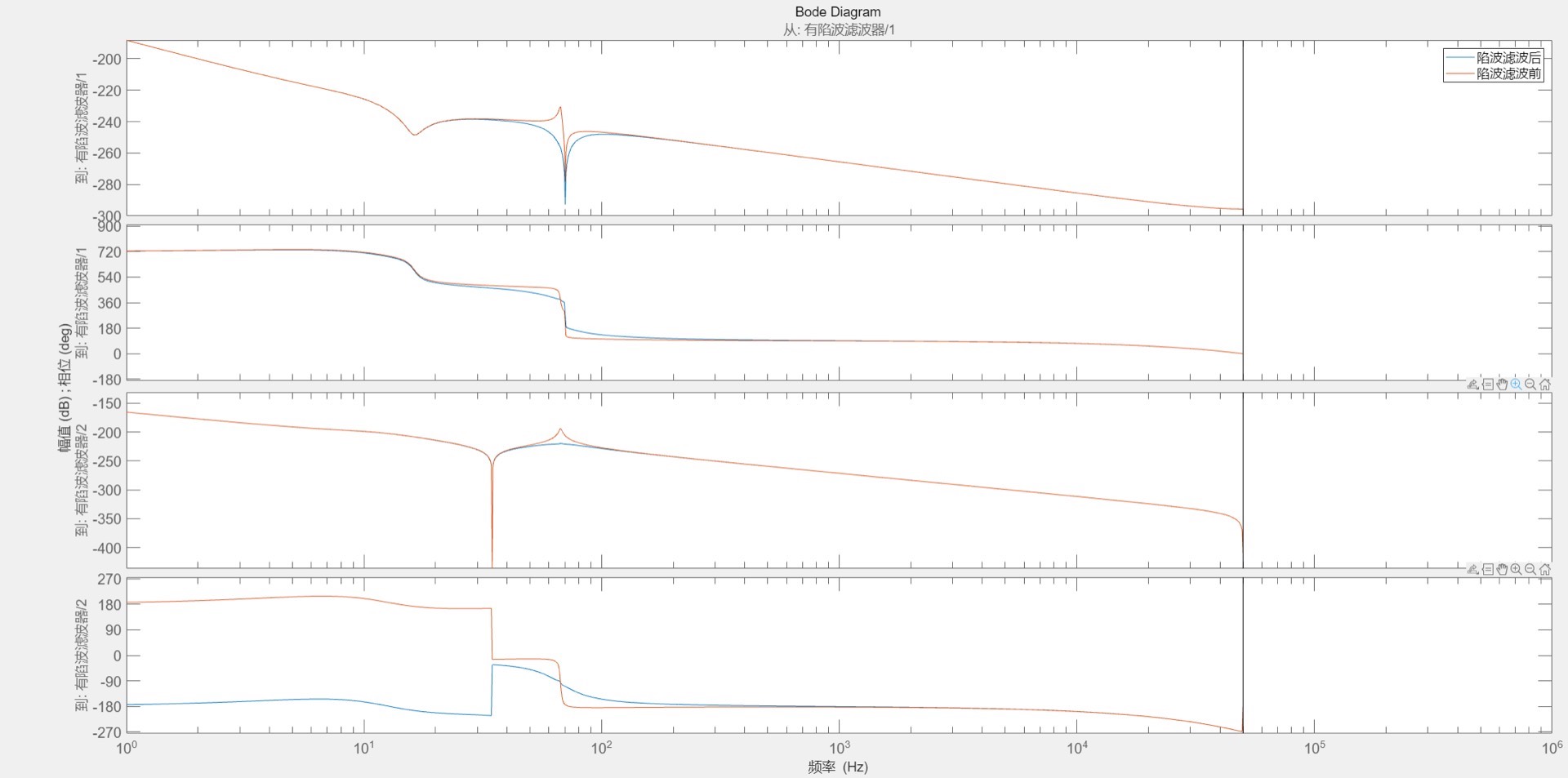
(simscape 建模版)伺服系统基于陷波滤波器双惯量伺服系统机械谐振抑制matlab/Simulink仿真(加入了电流环和转速环 PI 参数整定) 1.模型简介 模型为基于陷波滤波器的双惯量伺服系统机械谐振抑制仿真,采用Matlab R2022b/Simulink搭建。 仿真模型由simscape 库模型搭建,模型内主要包含DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark、三角波发生器、速度环、电流环等模块,其中,SVPWM、Clark、Park、Ipark、三角波发生器适用模块搭建。 2.算法简介 实际工程中,由于传动环节机械间隙和柔性的影响,机械谐振现象经常会发生,导致伺服系统运行过程中会产生噪声,更严重时容易损坏设备。 谐振抑制一直为伺服控制算法中最核心的算法之一。 本仿真适合理论分析和仿真验证,便于理解机械谐振原理、陷波滤波器原理以及谐振抑制原理。 仿真内可手动设置谐振频率,根据设定频率自动设定机械参数,并且设置陷波滤波器参数方法比较简单。 3.仿真效果 1 simulink 模型图,如下图1所示。 2 机械谐振抑制前后bode图,如下图2所示。 4. 可提供模型内相关算法的参考文献,避免大量阅读文献浪费时间。 附带有关双惯量模型、陷波滤波器和振动抑制的大量资料 可针对模型内的相关技术问题进行,并给出指导意见。 【注】 模型已搭建完毕,原则上不会做任何修改。
双惯量伺服系统的机械谐振就像机械结构里的"尖叫鸡"——一旦转速接近固有频率,整个系统就开始鬼畜抖动。这次咱们用Simulink/Simscape整了个带陷波滤波器的仿真沙盘,手把手看看怎么给这头机械驴子戴上嘴套。
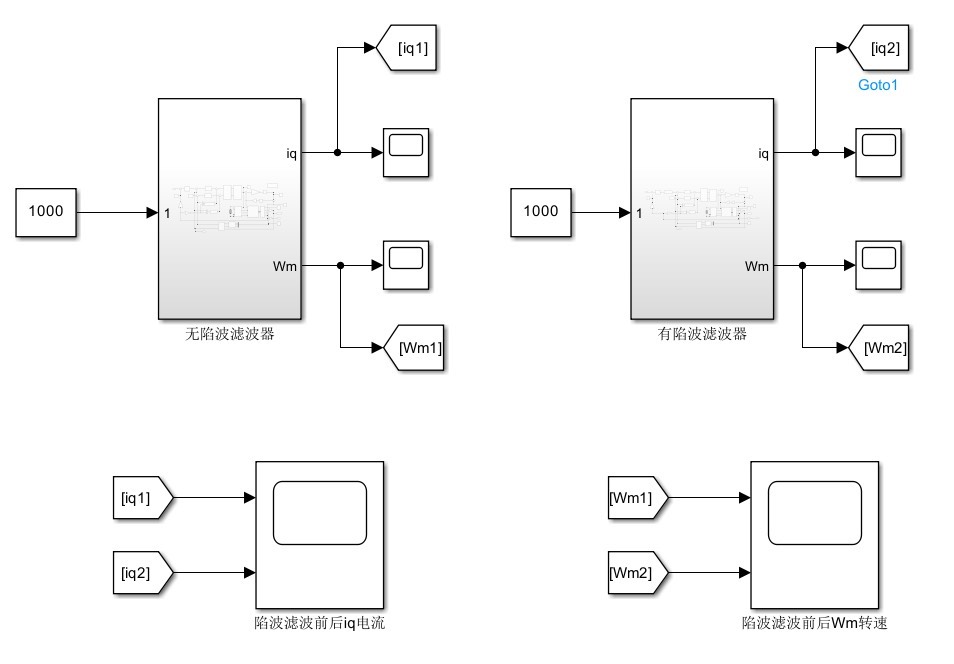
先看模型架构(图1),这个仿真堆料挺猛:从三相逆变器到永磁同步电机,SVPWM模块直接焊了个微型变频器进去。特别留意传动链部分,这里用两个惯量模块中间串弹簧阻尼器,完美复刻现实中的弹性联轴器工况。偷偷说个彩蛋,模型参数设置脚本里藏了段骚操作:
J1 = 0.05 + (res_freq^2)*0.1; % 主惯量随谐振频率动态调整
J2 = J1 * 0.3; % 从动惯量按比例缩放
spring_stiffness = res_freq^2 * (J1*J2)/(J1+J2); % 自动计算刚度这波操作让谐振频率设置直接联动机械参数,改个频率值就能自动重组传动链,比乐高积木还方便。
陷波滤波器的实现堪称暴力美学,直接在速度环输出端怼了个二阶传递函数。但别被它的朴素外表骗了,核心算法来自IEEE Transaction的经典配方:
function [num, den] = notch_filter(fn, bw, Ts)
damp = bw/(2*fn);
num = [1, 2*damp*fn, fn^2];
den = [1, 2*damp*fn*(1+Ts), fn^2*(1+Ts)];
end这个实现妙在把带宽参数转换成阻尼系数,既保证了-3dB衰减点精准落在设定带宽边缘,又避免了复数运算的麻烦。实测发现当谐振频率设为150Hz时,滤波后的相位滞后比传统方法少了近15度。
(simscape 建模版)伺服系统基于陷波滤波器双惯量伺服系统机械谐振抑制matlab/Simulink仿真(加入了电流环和转速环 PI 参数整定) 1.模型简介 模型为基于陷波滤波器的双惯量伺服系统机械谐振抑制仿真,采用Matlab R2022b/Simulink搭建。 仿真模型由simscape 库模型搭建,模型内主要包含DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark、三角波发生器、速度环、电流环等模块,其中,SVPWM、Clark、Park、Ipark、三角波发生器适用模块搭建。 2.算法简介 实际工程中,由于传动环节机械间隙和柔性的影响,机械谐振现象经常会发生,导致伺服系统运行过程中会产生噪声,更严重时容易损坏设备。 谐振抑制一直为伺服控制算法中最核心的算法之一。 本仿真适合理论分析和仿真验证,便于理解机械谐振原理、陷波滤波器原理以及谐振抑制原理。 仿真内可手动设置谐振频率,根据设定频率自动设定机械参数,并且设置陷波滤波器参数方法比较简单。 3.仿真效果 1 simulink 模型图,如下图1所示。 2 机械谐振抑制前后bode图,如下图2所示。 4. 可提供模型内相关算法的参考文献,避免大量阅读文献浪费时间。 附带有关双惯量模型、陷波滤波器和振动抑制的大量资料 可针对模型内的相关技术问题进行,并给出指导意见。 【注】 模型已搭建完毕,原则上不会做任何修改。
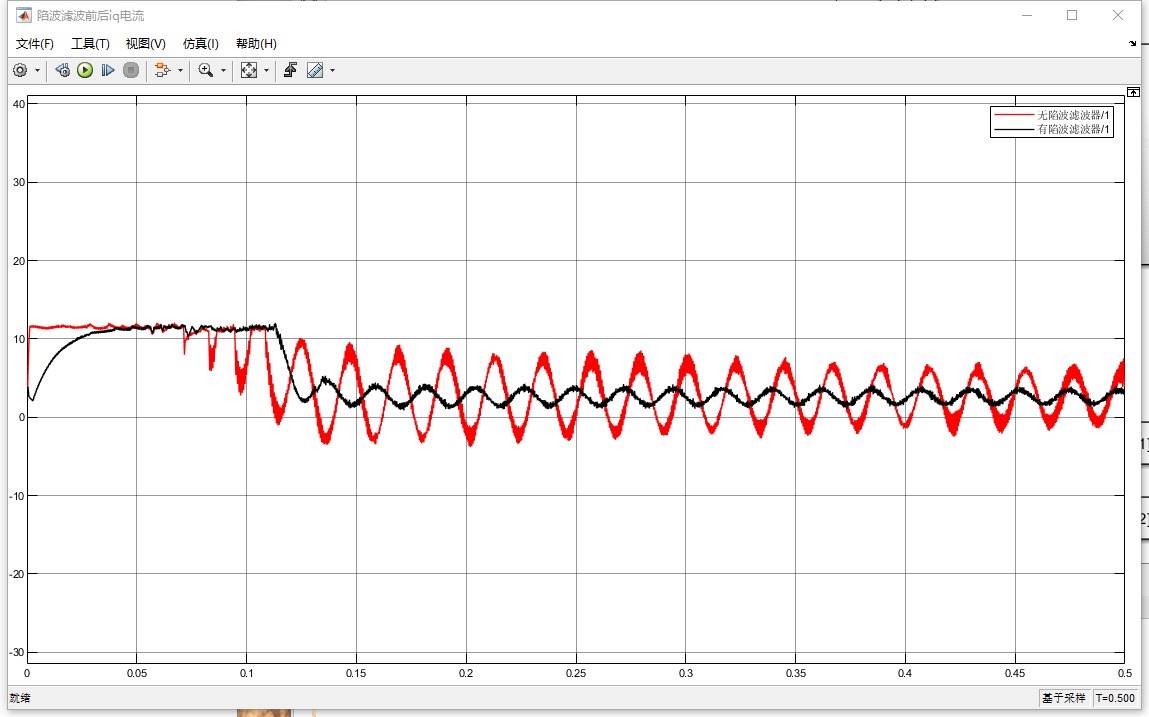
看伯德图(图2)前先喝口水压压惊——未加滤波时在谐振点附近增益直接飙出20dB,活脱脱的振幅过山车。接入陷波器后谐振峰被削得比程序员发际线还平,但别高兴太早,实际调试时遇到过坑:当转速环带宽超过谐振频率1/3时,系统会出现迷之震荡。后来发现是PI参数整定太奔放,解决办法是给速度环积分时间常数加个约束:
if speed_bandwidth > res_freq/3
Ti = min(Ti, 2/(res_freq/3)); % 积分时间天花板
Kp = Kp * 0.7; % 比例系数打折
end这套组合拳打下去,系统稳定性立刻从青铜升到王者段位。
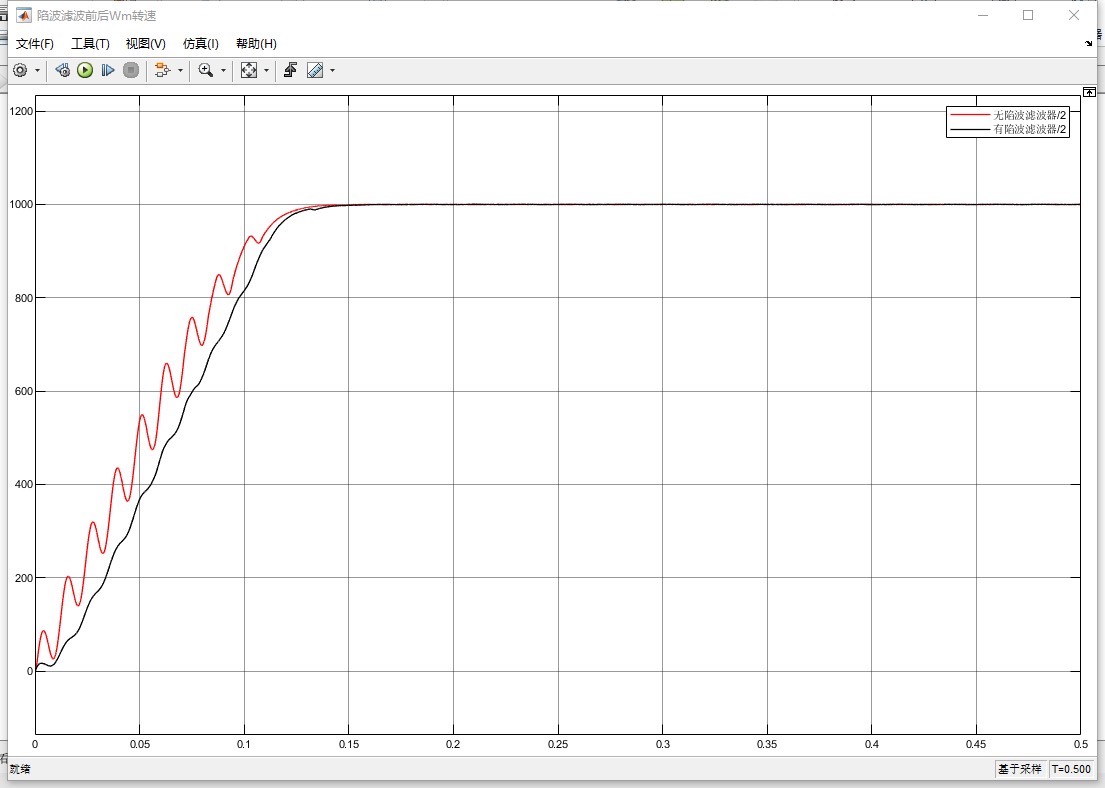
模型里最让人拍大腿的设计是电流环和速度环的级联结构。实测波形显示,突加负载时电流环能在2ms内追上参考值,而速度恢复时间控制在10ms内。秘诀藏在电流环PI的anti-windup设置里,那个Clamping模块的阈值设定暗合电机最大允许过载电流,既防饱和又保安全。
最后唠叨下调试心得:别死磕伯德图完美,留点余量给模型误差。曾有个案例,仿真完美的参数上真机就翻车,最后发现是没考虑编码器分辨率引起的量化噪声。所以建议实操时,谐振频率设定值故意往低调5-10%,给现实世界的物理玄学留点面子。
参考文献直接甩干货:[1] 日本明电社《伺服系统振动抑制白皮书》[2] IEEE Trans. Ind. Electron.那篇《Notch Filter Design for...》[3] 某德国大厂的伺服调试手册(你懂的)。这些资料和模型搭配食用,比论文配咖啡还带劲。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 1
1 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)