【RobotStudio 实战】带输送链的工业机器人工作站构建、动态夹具制作与逻辑仿真全流程
前言:为什么需要学习 Smart 组件与工作站逻辑?
在工业机器人离线编程中,单纯的静态模型无法模拟真实工厂中物料流动、夹具抓取等动态过程。RobotStudio 强大的 Smart 组件(Smart Component) 功能,能够赋予静态工装“灵魂”。通过将静态模型与逻辑子组件相结合,我们可以在数字孪生世界中完美复现输送链传输、气动夹具吸放以及复杂的信号交互。
本文将带你从零开始,一步步掌握动态输送链创建、动态夹具制作以及整站逻辑控制的核心技能,最终实现一个完整的自动化码垛工作站仿真。
一、 智能动态输送链的构建
在自动化工作站中,输送链用于连续不断地输送物料。我们需要利用 Smart 组件让静态的输送链模型具备“自动生成产品”和“向前传送”的功能。
1.1 创建基础组件
-
操作路径: 打开或解压基础练习工作站,将其另存为 “码垛工作站”。在 “建模” 选项卡中单击 “Smart组件”,构建一个新的 Smart 组件,将其重命名为
SC_InFeeder。
1.2 添加并配置核心子组件
进入 SC_InFeeder 的编辑界面,单击 “添加组件”,依次添加并配置以下核心子组件:

-
Source(产品源): 位于“动作”列表。将属性中的 Source 设置为工作站中的基础物料模型(如
Product_Source)。它的作用是作为母体,在仿真时自动复制出新的产品实体。 -
Queue(队列): 位于“其他”列表。用于管理和存储输送链上生成的多个产品实体,保持默认参数。
-
LinearMover(线性运动): 位于“本体”列表。用于驱动产品向前移动。设置属性:将 Object 绑定为
Queue (SC_InFeeder),根据输送链方向将 Direction 设为[-1000, 0, 0](沿X轴负方向),Speed 设为300mm/s。 -
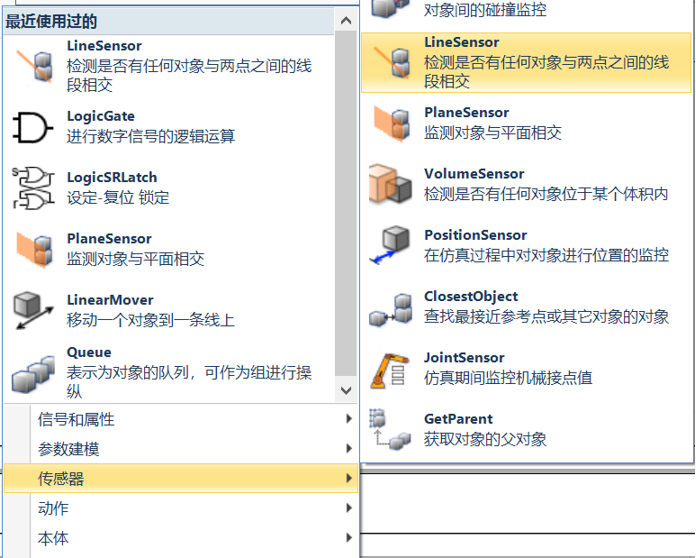
PlaneSensor(面传感器): 位于“传感器”列表。用于在输送链末端检测产品是否到位。根据输送链末端边缘调整其位置和大小。
-
LogicGate(逻辑门): 位于“信号和属性”列表。将属性 Operator 设置为
Not(非门),用于控制物料连续生成的间隔逻辑。
💡 避坑指南(规避传感器干涉): > 虚拟传感器在仿真时容易误检测到输送链自身。在“布局”选项卡中右击
Infeeder输送链模型,取消勾选“可由传感器检测”。随后,将输送链模型Infeeder整体拖入SC_InFeeder智能组件中,完成模型绑定。
1.3 创建属性连结与 I/O 信号连接
为了让子组件之间协同工作,需要建立数据和信号的传递通道:
-
属性连结(Property Link): 进入“属性与连结”选项卡,添加一条连结:源对象
Source (Copy)\rightarrow目标对象Queue (Back)。其含义是将产品源复制出来的每一个新物体,自动推入队列的末尾。 -
创建 I/O 信号: * 添加输入信号
diStart(DigitalInput,用于外部启动输送链)。-
添加输出信号
doBoxInPos(DigitalOutput,产品到位反馈信号)。
-
-
I/O 连接(I/O Connection)配置表:
源对象 源信号/属性 目标对象 目标信号或属性 业务逻辑说明 SC_InFeederdiStartSourceExecute外部启动信号触发产品源生成物料 SourceExecutedQueueEnqueue物料生成完毕后,自动加入运动队列 PlaneSensorSensorOutQueueDequeue物料到达末端后,从队列中移出以便抓取 PlaneSensorSensorOutSC_InFeederdoBoxInPos传感器检测到物料,向系统输出“到位”信号 PlaneSensorSensorOutLogicGate [NOT]InputA将传感器信号取反 LogicGate [NOT]OutputSourceExecute前一个物料被搬走后,自动触发生成下一个物料
1.4 阶段仿真运行验证
-
打开 “I/O仿真器”,选择当前系统为
SC_InFeeder。 -
点击 “播放” 开启仿真,将输入信号
diStart手动置为 1。 -
此时可观察到产品连续生成并沿输送链平稳移动,碰到末端传感器后停止,同时
doBoxInPos变为 1。 -
性能优化: 为防止仿真长时间运行产生大量废弃实体占用内存,可在
Source的属性中勾选 Transient(临时性复制品,被抓走或复位后自动销毁)。
二、 智能动态夹具(吸盘)的制作
在完成物料传输后,我们需要为机器人的机械臂安装一个具备“吸附”与“释放”功能的动态工具。
2.1 拆卸与工具属性设定
-
拆卸原机械工装: 在左侧“布局”窗口中找到原有的静态工具
tGripper,右键单击选择 “拆除”,在弹出的提示中选择“否”(使其保持当前空间位置,不恢复原点)。 -
创建 Smart 工具: 新建一个 Smart 组件并重命名为
SC_Gripper。 -
设定工具角色: 将刚才拆卸下来的
tGripper模型拖入SC_Gripper组件内部。在tGripper上右键勾选 “设定为Role”(Set as Role),使其在系统中具备合法的工业机器人工具特征。 -
装备到机器人: 将整体组件
SC_Gripper拖动到机器人模型(如IRB460)上松开,在弹出的对话框中选择替换原有的工具数据,实现工具的机械与逻辑安装。
2.2 添加吸放控制子组件
单击“添加组件”,为动态夹具配置以下动作逻辑子组件:
-
LineSensor(线传感器): 用于模拟吸盘的接近开关。捕捉吸盘下表面的中心点作为起始点(Start),根据吸附距离,在沿大地坐标系 Z 轴负方向偏移一定距离的位置设定结束点(End)。(同样记得取消 tGripper 自身的“可由传感器检测”属性)
-
Attacher(抓取组件): 实施吸附动作。将安装父对象 Parent 设为
SC_Gripper,子对象 Child 保持留空(由传感器动态捕获)。 -
Detacher(释放组件): 实施释放动作。在属性中勾选 KeepPosition,确保夹具松开后,工件能够保持在当前放下的空间坐标。
-
LogicGate(非门)与 LogicSRLatch(锁存器): 位于信号列表中,联合用于控制夹具气压反馈信号的置位与复位。
2.3 建立夹具内部逻辑连结
-
属性连结:
-
LineSensor (SensedPart)\rightarrowAttacher (Child):将线传感器检测到的动态物体,实时传递给抓取组件作为拾取目标。 -
Attacher (Child)\rightarrowDetacher (Child):确保抓取组件吸过来的物体,就是释放组件需要放开的物体。
-
-
创建夹具 I/O 信号: 创建输入信号
diGripper(由机器人程序控制,1为吸取,0为释放)。-
创建输出信号
doVacuumOK(向机器人反馈真空建立成功)。
-
-
核心控制逻辑: 当机器人发送
diGripper=1时,激活线传感器进行检测并触发Attacher动作,同时通过锁存器将doVacuumOK置位;当diGripper=0时,通过非门触发Detacher释放物体,并将doVacuumOK复位。
三、 工作站全流程逻辑联调与仿真
有了动态输送链和动态夹具后,最后一步是配置机器人系统的 I/O 信号,加载控制程序,并将所有物理信号连接起来。
3.1 机器人系统初始化(I-启动)
为了保证联调时数据干净、无冲突,建议对虚拟机器人控制器进行初始化:
-
备份当前系统: 在“控制器”选项卡下单击“备份” \rightarrow “创建备份”,设置好路径。
-
执行 I-启动: 单击“重启”下拉菜单 \rightarrow 选择 “重置系统(I启动)”。系统重启后,原有的系统参数和 RAPID 程序将被清空,恢复出厂状态。
3.2 虚拟机器人端 I/O 配置
在“控制器”选项卡左侧树状菜单中,展开 “配置”(Configuration) $\rightarrow$ “I/O System”:
-
新建通信板卡: 在 Unit 类型下右键新建,重命名为
Board10(Type 选择DeviceNet Board,Address 设为10)。 -
新建系统信号: 在 Signal 类型下右键新建,创建以下三个与外部通信的关键信号:
-
diBoxInPos(Digital Input,所属板卡Board10) —— 用于接收输送链的产品到位信号。 -
diVacuumOK(Digital Input,所属板卡Board10) —— 用于接收夹具的真空反馈信号。 -
doGripper(Digital Output,所属板卡Board10) —— 用于控制夹具进行吸放。
-
3.3 导入 RAPID 控制程序
-
在左侧 RAPID 菜单下右击机器人任务
T_ROB1,选择 “加载模块”,导入准备好的MainModule.mod码垛控制程序。 -
模块加载后,单击菜单栏的 “同步” \rightarrow “同步到工作站”,勾选全部路径、位置和数据,确保离线程序在仿真环境中生效。
📄 核心 RAPID 代码逻辑解析
本项目采用经典的 “3+2”交错堆叠跺型(即单层满载为 5 个产品:2个纵向,3个横向,上下层错开),双层总计码垛 10 个产品满载。
主程序 Main: 循环判断托盘满载标志
bPalletFull。若未满载,则循环调用rPick(吸取流程)和rPlace(放置流程)。rPick 核心控制段:
WaitDI diBoxInPos, 1; ! 等待输送链上的物料到位信号 MoveJ pPickHome, v1000, z50, tGripper; ! 移动到吸取上方点 MoveL pPick, v500, fine, tGripper; ! 线性下行到吸取点 Set doGripper; ! 机器人输出置位:控制吸盘吸取 WaitDI diVacuumOK, 1; ! 等待 Smart 夹具反馈真空建立成功 MoveL pPickHome, v500, z50, tGripper; ! 带料抬起码垛位置计算(rPosition): 程序内部使用
TEST nCount计数器结合RelTool相对工具位移函数。根据当前放入的是第 1 至第 10 个产品,自动在数组或位置中计算出对应的 X、Y、Z 轴偏移坐标,实现精确定位。
3.4 建立整站闭环逻辑连接
这是数字孪生工作站成败的关键。在 “仿真” 选项卡中单击 “工作站逻辑”(Station Logic),进入 “信号和连接” 选项卡,单击 “添加I/O连接”(Add I/O Connection),将机器人系统与两大 Smart 组件的信号彻底打通:
[机器人系统 SC_Practise] 的 doGripper --> [智能夹具 SC_Gripper] 的 diGripper
[智能夹具 SC_Gripper] 的 doVacuumOK --> [机器人系统 SC_Practise] 的 diVacuumOK
[智能输送链 SC_InFeeder] 的 doBoxInPos --> [机器人系统 SC_Practise] 的 diBoxInPos
四、 成果验证与项目交付
-
准备就绪: 打开 “I/O仿真器”,切换到
SC_InFeeder信号窗口。 -
开启仿真: 点击仿真选项卡正上方的 “播放”(Play)按钮。手动给
diStart一个脉冲信号。 -
全自动运行呈现: 输送链前端开始自动、源源不断地生成工件并向后输送;工件到达末端限位传感器处自动停下,同时向机器人发出到位信号。机器人收到信号后,立刻下行执行吸取动作,夹具吸住工件并成功向机器人反馈真空信号。机器人随之抬起,将工件搬运至右侧托盘,按照预设的“3+2”交错型样式进行精密码垛。
-
循环结束: 当精准码满 10 个工件后,托盘满载,机器人自动停止搬运并返回安全等待点,整站动态仿真完美闭环。
-
项目打包分享: 全线联调成功后,可以通过 RobotStudio 的 “文件” \rightarrow “共享” \rightarrow “打包并运行” 功能(Pack and Go),将整个数字孪生工作站及其控制系统、Smart组件完整打包成一个独立文件。非常适合直接发送给客户展示或与同行交流分享!
如果你在实战配置过程中遇到了工件飞出、信号死锁或吸盘不吸等常见仿真问题,欢迎在评论区留言讨论!点赞、收藏不迷路,持续更新更多工业机器人高级离线编程与仿真教程!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 2
2 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)