无人船的基本结构
1 整体架构
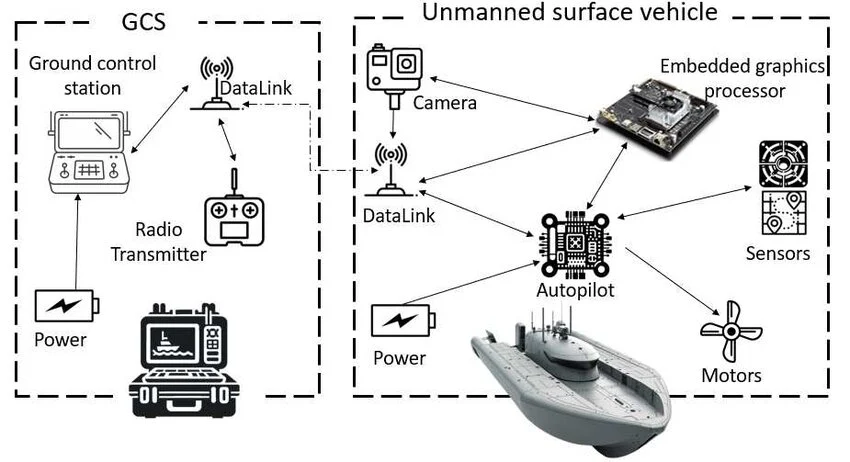
从这个图可以看出来,无人船的核心部件就是船体和马达,MCU船控(相当于小脑),工业计算机(相当于大脑),外围传感器,业务传感器。如果再扩展一下,还有遥控器,地面站这些。
2 船体与动力推进系统(硬件外壳与执行机构)
-
船体结构: 常见有单体船、双体船(Maran)。工业和测绘领域极度青睐双体船,因为水面稳定性极佳,抗风浪能力强,且双体之间有极大的空间用来挂载各种吃水深度不同的传感器。
-
动力源: 绝大多数中小型无人船采用纯锂电池组(LiPo/LiFePO4)供电,大一些的采用油电混合。
-
推进器(Thrusters): * 传统方案是马达驱动螺旋桨+舵机调方向。
-
现在的趋势是双无刷电机(BLDC)差速推进。通过控制左右两个螺旋桨的转速差来实现转弯、原地掉头(360°旋转),直接取消了机械舵机,极大地降低了机械故障率和密封难度。
-
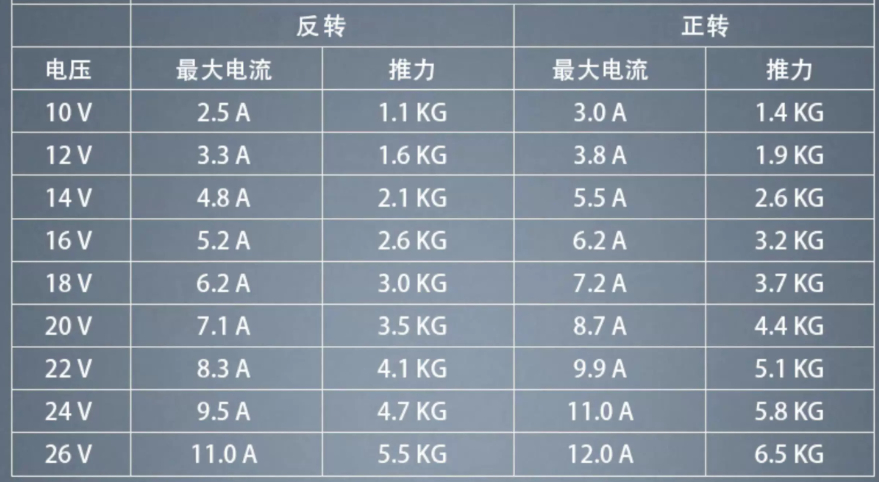
大概看了一下目前淘宝上的无人船电机,大概都是这样的PWM控制直流电机。
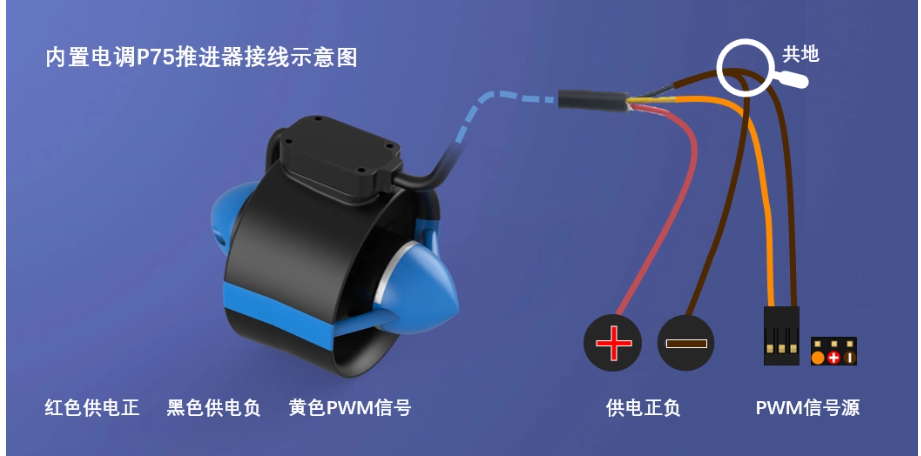
基本一般民用无人船就是用直流无助PWM调速电机(BLDC)就够了,步进伺服这些基本也不会用。还有一个核心参数就是推力,基本基本上300W能做到6.5KG的推力。
3 核心控制与导航系统(无人船的 MCU / 主控)
3.1 工业网关
基本上就是一台Linux电脑,可以用Openwrt或者ROS,一般SOC算力会比较强甚至集成NPU。
重点外接业务传感器,比如声纳,激光雷达,全景摄像头等。可以在里面部署深度学习模型,同时可以外挂4G,WIFI等模块,实现远程控制。
总的来说就是Linux系统,这里就不多写了。。。
3.2 MCU控制
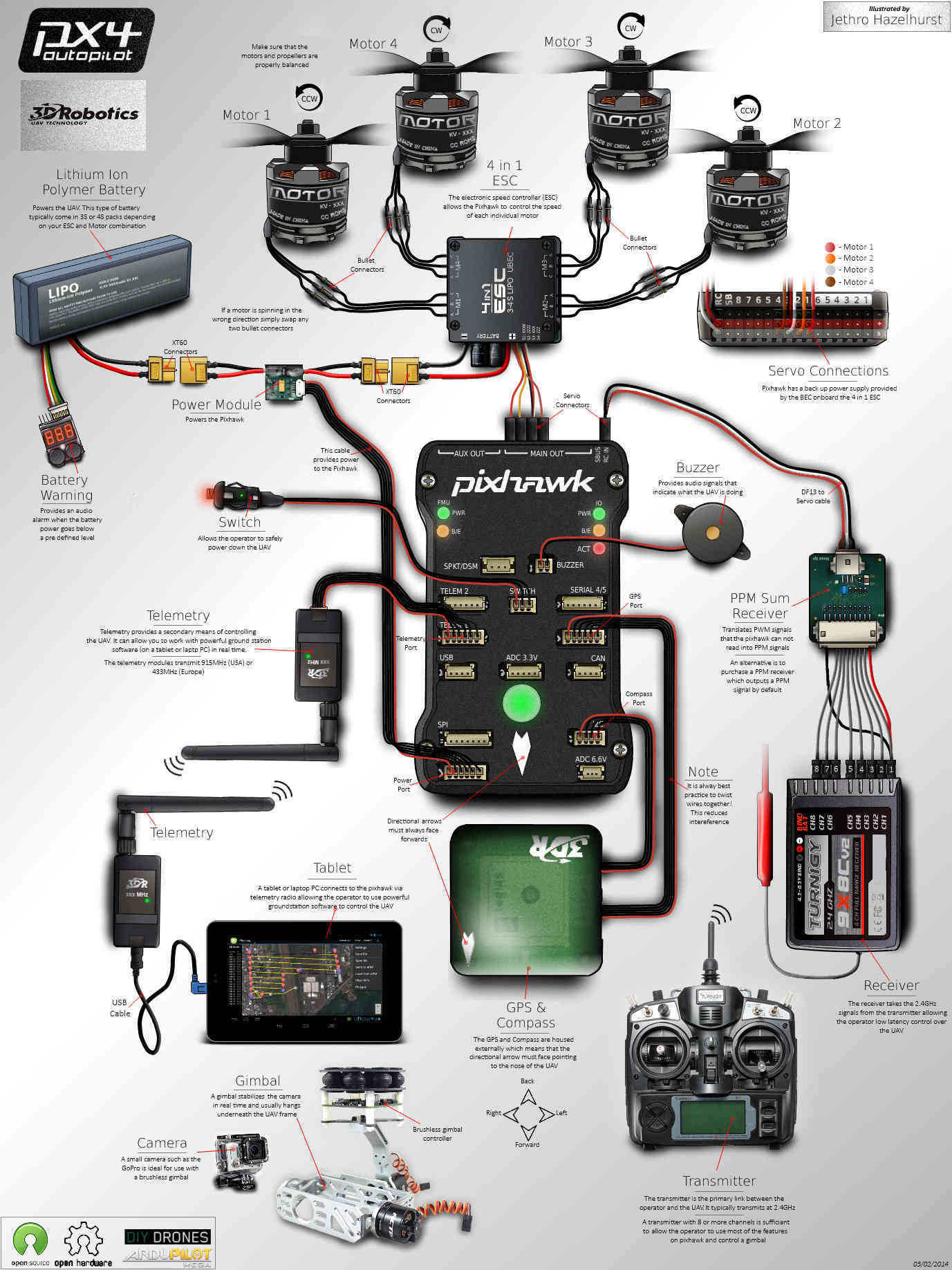
目前主要是ArduPilot和PX4 autopilot,关于这个部分,我觉得还是挺有趣的。也许有时间我会详细看一下这部分的硬件设计和源码。
基本上就是现在开源界把MCU这部分,从软件到硬件到传感器,全部封装了,对于一般的个人或者小厂商,直接买成品拿来,然后修改一些航行参数就可以直接用了。真的省非常多事。
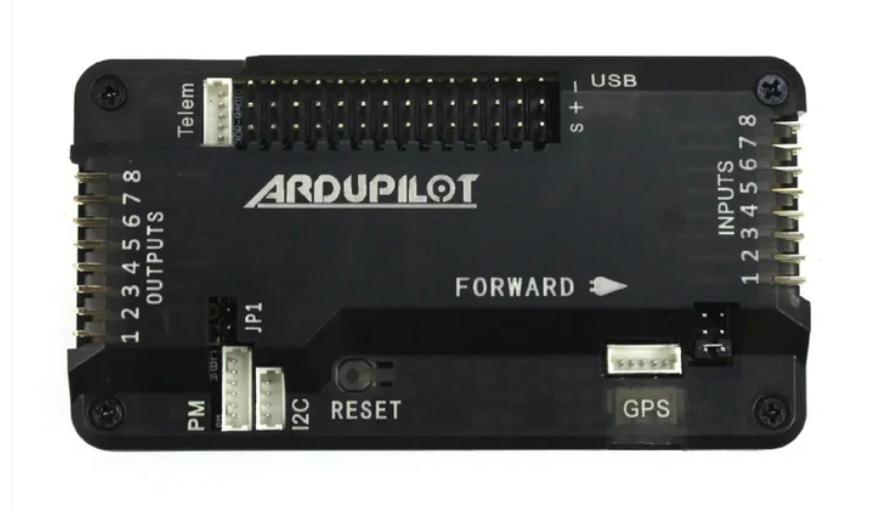
ArduPilot
ArduPilot是2007年起源于DIY Drones社区、基于GPLv3协议的**开源跨平台无人系统自动驾驶软件**,用C++编写,支持多旋翼、固定翼、无人船/USV、无人车、水下机器人等几乎所有无人载具,可运行在Pixhawk、Cube、Navio2等多种硬件上;它集成IMU/GPS/气压计/罗盘等多传感器融合与MAVLink通信,提供手动、半自主、全自主(航点、自动起降、悬停、返航)等模式,配套Mission Planner、QGroundControl等地面站,具备完善的安全保护(失控/低电/地理围栏)与日志分析能力,全球社区活跃、文档丰富、高度可定制,广泛用于科研、教育、商业巡检、测绘、农业及工业自动化场景。
PX4 autopilot
PX4 Autopilot是Linux基金会Dronecode项目下、基于NuttX实时操作系统的**开源工业级无人系统自动驾驶软件栈**,采用模块化架构与uORB消息总线,支持多旋翼、固定翼、VTOL、无人船/车、水下机器人等全品类无人载具;集成EKF2多传感器融合(IMU/GPS/罗盘/气压计),提供手动、半自主、全自主(航点、返航、悬停、避障)模式,兼容Pixhawk等硬件与QGroundControl地面站,支持MAVLink/ROS2通信,具备完善安全保护与故障容错能力,全球社区活跃、工业适配性强,广泛用于测绘、巡检、农业、物流及科研场景。 要不要我把它和ArduPilot做一个关键差异对比表,方便你快速选型?
小公司基本都用这两家,区别如下:
| 维度 | ArduPilot (ArduRover) | PX4 Autopilot |
| 代码风格 | 纯 C++ 经典面向对象,追求高效率、压榨裸机性能 | 现代 C++ 结合 POSIX 接口,高度模块化、松耦合 |
| 系统架构 | 单线程/多任务时间片调度,核心算法高内聚 | 真正的微内核多线程,依靠 uORB 分布式总线通信 |
| ROS 2 兼容 | 需要靠 MAVROS 协议转换网关(略显繁琐) | 原生 DDS 桥接,飞控话题直接就是 ROS 2 话题 |
| 开源协议 | GPLv3(要求开源,商业防犯规成本高) | BSD(极度自由,允许大厂闭源魔改) |
| 水面船支持 | ArduRover 极其成熟,调参保姆级,小厂首选 | 早期重航模飞行,目前正疯狂补齐水面/割草机方案 |
据说PX4的方案会稍微高端一点点。有时间详细再看看这部分的软硬件吧。。
4 避障与安全系统(感知层)
水面上充满了不确定性(如暗礁、漂浮的渔网、过往的游船、枯树枝),必须有自主避障能力:
-
毫米波雷达(77GHz/24GHz): 水面环境噪声大(浪涌),毫米波雷达穿透力强,不受大雾、强光、水汽影响,用来做远距离的动静态障碍物检测极好。
-
激光雷达(LiDAR): 用于近距离(100米内)高精度的三维建模和障碍物识别。
-
双目/单目摄像头: 配合端侧 NPU,运行轻量级目标检测算法(如 YOLO),识别水面的浮标、垃圾或行人。
-
红外夜视仪: 用于夜间巡检或搜救。
这部分就暂时不多写了。
5 任务载荷系统
-
水下测绘/搜救: 挂载 单波束/多波束测深仪(Echo Sounder)、侧扫声呐(Side Scan Sonar),利用声学原理探测水深、生成水下地形图,或者搜寻溺水者/沉船。
-
环保水质监测: 内部集成多参数水质采样与分析仪(实时测量 pH 值、溶解氧、浊度、氨氮等),甚至自带机械臂或抽水泵进行物理水样采集。
-
水面清理: 船体中部设计成开放式传送带或收集网,用来自动打捞水面绿萍、塑料瓶等垃圾。
这部分就暂时不多写了。
6 无人船关键技术点
-
水流/风浪涌对冲算法: 水流是有推力的,如何让船在强风大浪里还能笔直地走直线(对控制理论、PID 调谐要求极高)。
-
多传感器融合(Sensor Fusion)与自主避障: 如何把 IMU、RTK、雷达和视觉数据在端侧(SoC/MCU)进行低延迟的融合,做到在复杂水域不撞船、不挂网。
-
低功耗长期驻留: 很多无人船现在配合“自动充电坞”,自己没电了会自动开回岸边的岸基机箱里充电,充满再出来干活。这就要求整套系统的电源管理(PMIC)、待机休眠和唤醒机制要做得天衣无缝。
-
自动驾驶与自主等级:航点自主 + 简单避障(摄像头 / 超声 / 短距雷达)。更高级的可以全场景感知 + AI 避障 + 动态航线重规划 + 集群协同。
-
定位精度。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 6
6 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)