【MATLAB】基于运动学滑模的车辆轨迹跟踪控制实现与鲁棒性验证
摘要
针对自动驾驶车辆变道行驶轨迹跟踪难题,本文以车辆后轴作为控制参考点,设计运动学滑模轨迹跟踪控制器,并结合搭载 Pacejka 非线性轮胎模型的自行车动力学模型完成仿真验证。将车辆位姿偏差转换至路径局部坐标系,融合航向偏差构建耦合滑模面,搭配固定趋近律与输入饱和抑制策略开展控制。设置单变道、双变道两类行驶轨迹,遍历 0.4、0.6、0.8、1.0 四档路面附着系数,共计 8 组仿真工况。结果表明:高附着干路面条件下,双变道工况最大法向跟踪误差 0.4719m,平均法向误差 0.1910m;路面附着系数降至 0.4 时,双变道场景控制器失去稳定,法向误差最大值突破 5m。本次仿真明确了该固定增益滑模控制器有效工作边界,可为后续抖振优化、自适应控制算法设计提供仿真基准。
关键词:滑模控制;轨迹跟踪;自动驾驶;Pacejka 轮胎模型;鲁棒性分析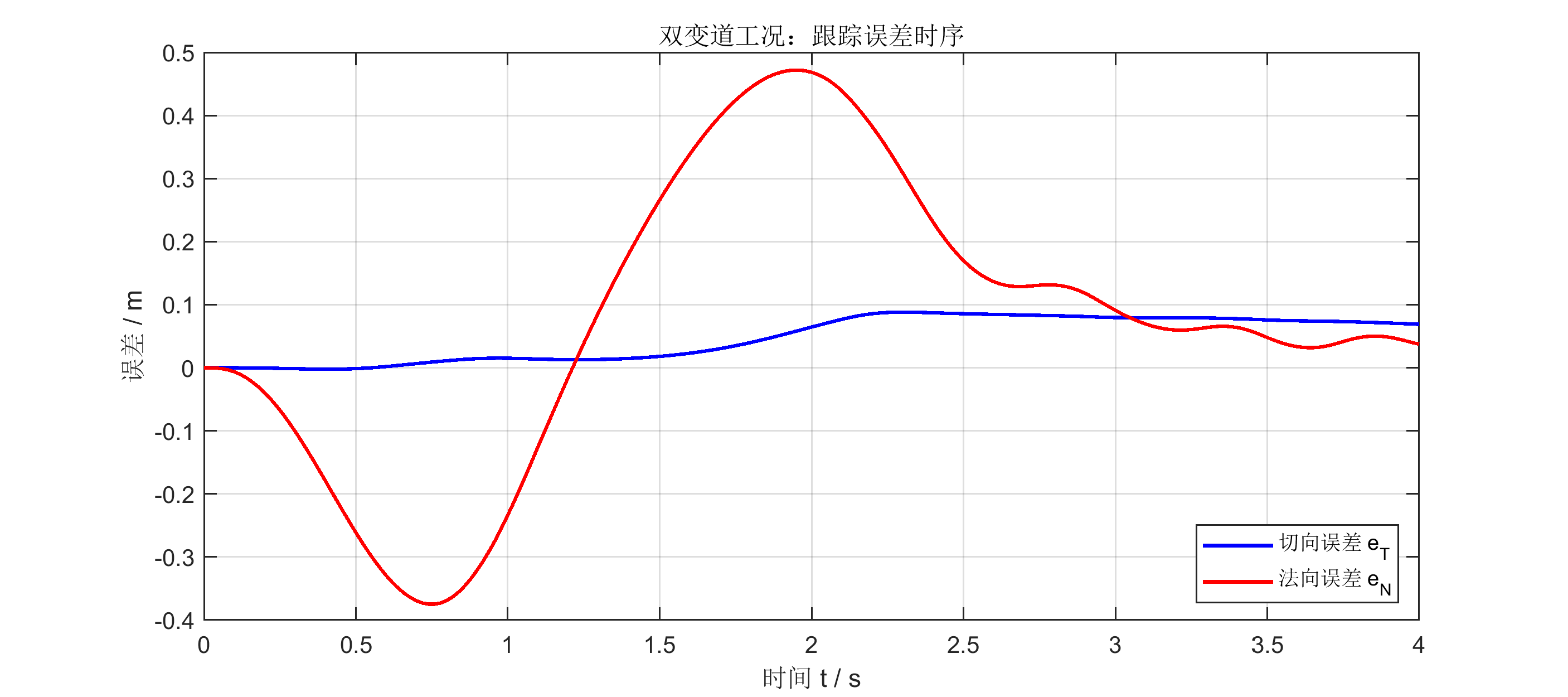
1 引言
轨迹跟踪是自动驾驶运动控制核心模块,车辆系统本身具备强非线性特征,轮胎接地作用力受路面附着状态约束显著,叠加轨迹曲率突变、模型参数扰动与外界干扰,大幅提升控制设计难度。目前主流控制方案包含几何跟踪算法、模型预测控制、非线性反馈控制等。滑模控制具备抗参数扰动、有限时间收敛的优势,广泛应用于车辆侧向运动控制领域。
常规运动学滑模控制适用于低速行驶场景,高速行驶或低附着路面工况下,传统切换函数易引发控制抖振,固定控制增益无法适配复杂路况变化。本文依托高精度非线性轮胎车辆模型,搭建后轴点位运动学滑模控制器,测试不同变道工况、不同路面附着系数下的轨迹跟踪精度与轮胎受力状态,界定控制器稳定运行范围,为算法优化提供量化参考依据。研究内容涵盖参考轨迹参数化求解、位姿误差坐标转换、耦合滑模面设计、控制律求解与限幅处理,完成多工况批量仿真及性能统计分析。
2 研究方法
2.1 车辆动力学模型
采用平面自行车模型描述车辆运动状态,系统状态量\(\boldsymbol{x}=[X,Y,\psi,v_x,v_y,\omega]^\mathrm{T}\),依次对应大地坐标系横纵坐标、车身航向角、车体纵向侧向速度与横摆角速度。车辆动力学方程:\(\dot v_x=\frac{F_{fx}+F_{rx}}{m}+v_y\omega,\quad \dot v_y=\frac{F_{fy}+F_{ry}}{m}-v_x\omega,\quad \dot\omega=\frac{l_F F_{fy}-l_R F_{ry}}{J}\)整车质量\(m=1750\mathrm{kg}\),横摆转动惯量\(J=2500\mathrm{kg\cdot m^2}\),质心至前后轴距离分别为\(l_F=1.43\mathrm{m}\)、\(l_R=1.27\mathrm{m}\)。采用 Pacejka 魔术公式计算轮胎作用力,结合路面附着系数、轮胎滑移率求解前后轮受力,依据法向载荷平衡关系获取轮胎垂向载荷。
2.2 路径误差坐标转换
将车辆实际位置与参考轨迹坐标偏差,转换至轨迹切向、法向局部坐标系,得到切向误差\(e_T\)、法向误差\(e_N\),航向偏差定义为\(e_\theta=\psi-\theta_d\)。结合后轴控制点位置完成误差修正,保证误差模型与控制目标相互匹配。
2.3 滑模面与控制律设计
构建两组耦合滑模面,关联位置误差与航向偏差:\(s_1=\dot e_T+k_1 e_T,\qquad s_2=\dot e_N+k_2 e_N+k_0\mathrm{sgn}(e_N) e_\theta\)选取恒定趋近律设计控制律,求解纵向期望加速度与前轮转角控制量,设置固定控制增益参数,同时对前轮转角输出施加正负九十度限幅约束,规避执行机构超限问题。
2.4 仿真实验设置
采用 MATLAB ode45 求解器运算,仿真步长 0.02s。构造分段多项式轨迹,分别开展 2s 单变道、4s 双变道仿真测试。以路面附着系数为变量开展鲁棒性测试,四档系数搭配两类轨迹形成 8 组工况。统计轨迹贴合度、跟踪误差、控制输出、轮胎受力饱和度四项评价指标。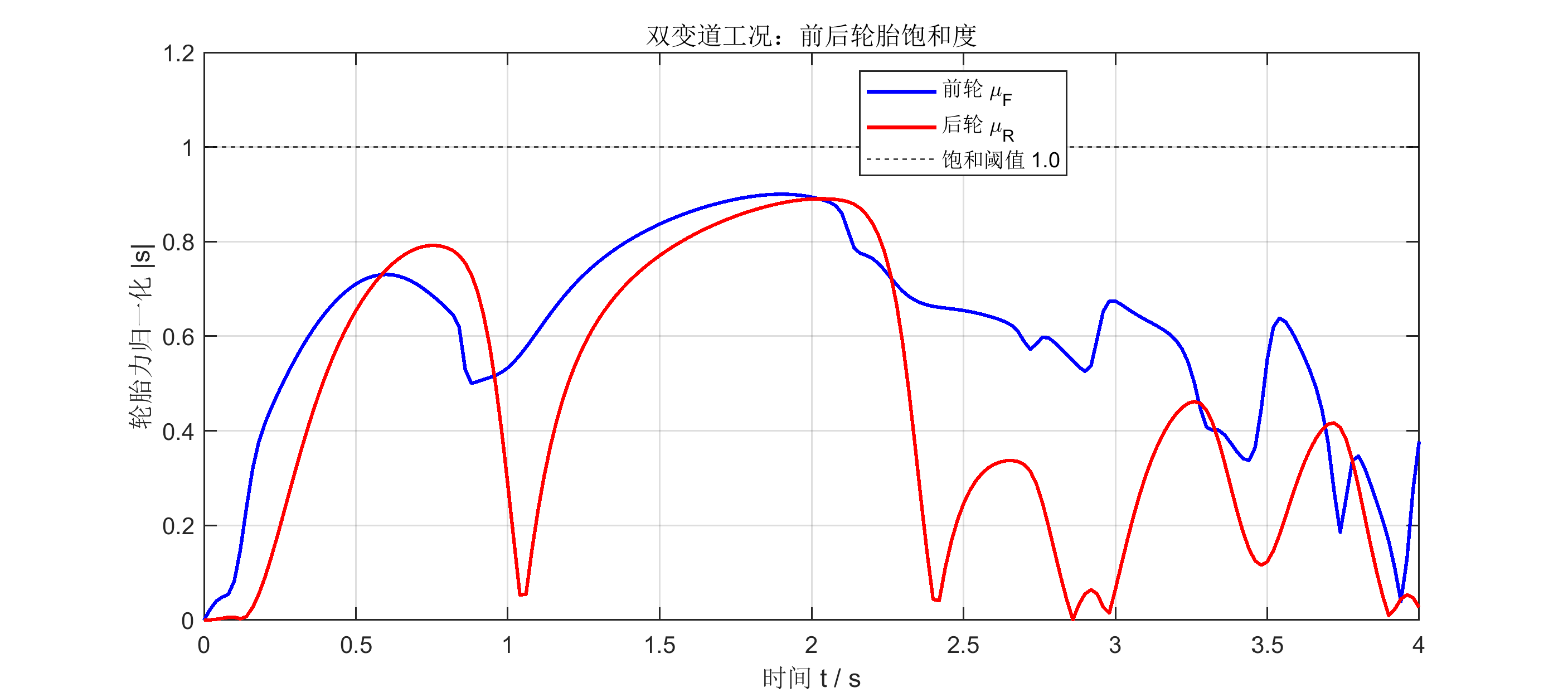
3 仿真结果
3.1 标准路面跟踪性能
单变道工况车辆轨迹可紧密贴合规划路径,运行过程无明显超调,切向误差稳定维持小范围区间,法向误差峰值 0.27m,直线行驶阶段误差快速收敛,前轮转向动作平缓。
双变道轨迹存在两次反向曲率切换,跟踪难度提升,最大法向误差 0.4719m,平均法向误差 0.1910m,仿真末期误差收敛至厘米级别。车辆轮胎整体工作在线性及弱非线性区间,前后轮平均力饱和度分别为 0.611、0.453,未达到极限附着状态。
3.2 滑模面动态变化规律
切向对应滑模面波动幅度较小,运行曲线平稳;曲率突变时刻法向滑模面产生瞬时脉冲波动,短时间内快速回归稳定区间。符号函数带来的非光滑特性,使得滑模曲线过零点处斜率突变明显,未出现持续性高频抖振现象。
3.3 路面附着系数鲁棒特性
路面附着系数逐步降低,车辆跟踪误差呈现逐级增大趋势。单变道工况下,附着系数降至 0.4 时误差出现突变式上涨;双变道工况性能衰减更为剧烈,低附着路面车辆大幅偏离预设轨迹。低附着条件下轮胎趋近受力极限,原有线性建模假设不再成立,控制效果显著变差。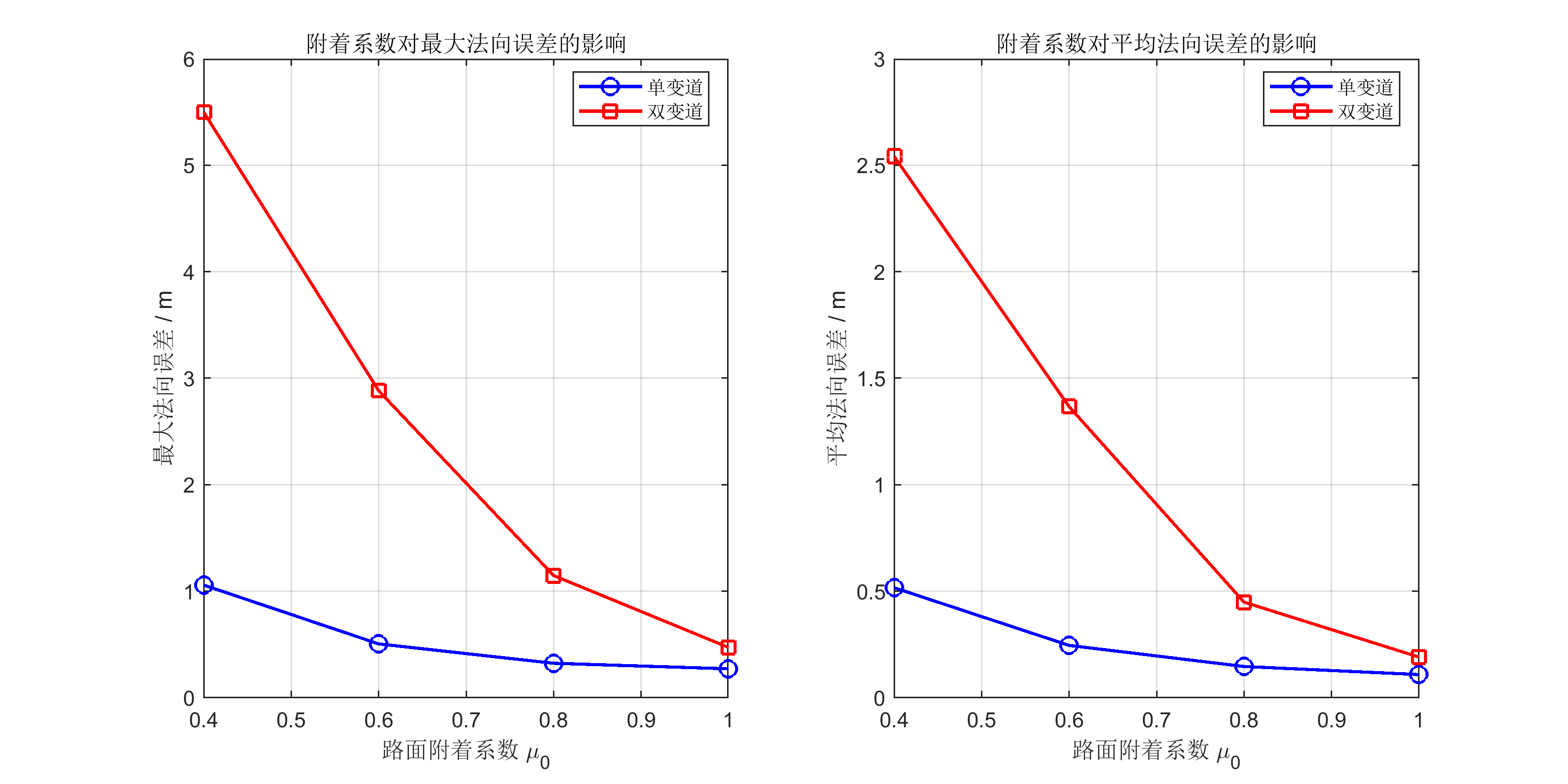
4 分析与讨论
耦合式滑模面可有效协调位置偏差与航向偏差,正常附着路面能够实现分米级高精度轨迹跟踪,变道过渡行驶状态平稳。控制器性能对路面附着条件敏感度极高,固定增益无法补偿低附着下轮胎刚度衰减特性,同时轮胎进入强非线性工作区间后,控制反馈匹配性下降,加剧轨迹偏离问题。
控制律内部符号切换函数是抖振产生的根源,数值求解步长可小幅平滑波动,实际车载硬件运行时,需替换饱和函数、双曲正切函数优化切换逻辑,削弱控制抖振。本次仿真未引入传感器测量噪声、车体参数扰动,且仅测试低速变道场景,后续可拓展复杂路况,完善扰动抑制相关研究。
5 结论
本文设计的运动学滑模控制器,在高附着路面单双变道工况中均可实现良好轨迹跟踪效果,轮胎受力处于合理区间;路面附着系数下降会持续劣化控制性能,附着系数低于 0.6 后双变道跟踪精度急剧恶化,固定增益滑模控制难以适配低附着复杂路况。后续可引入边界层优化抑制抖振,设计自适应增益、扰动观测器,提升控制器全路况适配能力。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 12
12 0
0- 0



 已为社区贡献26条内容
已为社区贡献26条内容

所有评论(0)