A General Integrated Sensing and Communication Channel Model Combined With Scattering Clusters (II)
IV. 结果与分析
本节考虑城市微小区(Urban Micro, UMi)街谷场景,并假设 ISAC 收发机与目标位于同一水平面,以简化计算。此外,BS 被认为是静止的,因此速度向量为 v ˉ ′ = 0 \bar{\mathbf v}'=\mathbf 0 vˉ′=0。假设 BS 位于 GBSM 的原点,发射天线处发射信号的位置记为 d ˉ t x , s \bar{\mathbf d}_{\mathrm{tx},s} dˉtx,s,可表示为
d ˉ t x , s = [ 0 0 0 ] . (39) \bar{\mathbf d}_{\mathrm{tx},s} = \begin{bmatrix} 0&0&0 \end{bmatrix}. \tag{39} dˉtx,s=[000].(39)
记第 e e e 个感知天线处接收信号的位置为 d ˉ s x , e \bar{\mathbf d}_{\mathrm{sx},e} dˉsx,e。假设感知天线之间的间距为半波长,则 d ˉ s x , e \bar{\mathbf d}_{\mathrm{sx},e} dˉsx,e 表示为
d ˉ s x , e = [ 0 e × λ 0 / 2 0 ] , e = 0 , 1 , … , N R x , A n − 1 , (40) \bar{\mathbf d}_{\mathrm{sx},e} = \begin{bmatrix} 0&e\times\lambda_0/2&0 \end{bmatrix}, \quad e=0,1,\ldots,N_{\mathrm{Rx,An}}-1, \tag{40} dˉsx,e=[0e×λ0/20],e=0,1,…,NRx,An−1,(40)
其中, N R x , A n N_{\mathrm{Rx,An}} NRx,An 表示感知天线数量。
对于雷达感知,本文采用 [39] 中提出的经典雷达处理算法检测目标的相对速度和距离。此外,采用 MUSIC 算法估计目标方位信息 [40]。随后,利用最大似然估计算法匹配目标的相对速度、距离和方位信息。经典雷达处理算法的简化步骤如下。
注:
这里的三个算法分工不同。 经典雷达处理算法主要指后面的逐元素复数除法和二维 DFT/IFFT 处理,用于从 OFDM 回波中得到距离-速度估计 ( R , v ) (R,v) (R,v);MUSIC 利用阵列接收数据估计目标方位角 θ \theta θ;最大似然估计算法并不是替代前面的 2DFFT,而是把 2DFFT 得到的距离-速度峰与 MUSIC 得到的角度峰进行数据关联,形成完整目标参数三元组 ( R , v , θ ) (R,v,\theta) (R,v,θ)。
为什么需要匹配。 距离-速度图只能告诉我们存在若干 ( R , v ) (R,v) (R,v) 峰,MUSIC 只能给出若干角度峰,二者一开始并没有天然绑定关系。最大似然匹配就是在可能的配对关系中选择最能解释接收信号的一组组合。
Step 1:获取信道信息矩阵。 记发射调制信号矩阵和接收感知信号矩阵分别为 X \mathbf X X 和 Y \mathbf Y Y。每个矩阵的大小为 N f × N N_f\times N Nf×N,其中 N N N 表示子载波数量, N f N_f Nf 表示参与评估的 OFDM 符号数量。通过对接收信息符号与发射信息符号进行逐元素复数除法,去除发射信息,可以得到信道信息矩阵:
[ D ] m , n = [ Y ] m , n [ X ] m , n , m = 1 , … , N f , n = 1 , … , N , (41) [\mathbf D]_{m,n} = \frac{[\mathbf Y]_{m,n}}{[\mathbf X]_{m,n}}, \quad m=1,\ldots,N_f,\ n=1,\ldots,N, \tag{41} [D]m,n=[X]m,n[Y]m,n,m=1,…,Nf, n=1,…,N,(41)
其中, [ X ] m , n [\mathbf X]_{m,n} [X]m,n 表示第 n n n 个子载波、第 m m m 个 OFDM 符号上的发射调制符号, [ Y ] m , n [\mathbf Y]_{m,n} [Y]m,n 和 [ D ] m , n [\mathbf D]_{m,n} [D]m,n 类似。
Step 2:两次 DFT 处理。 从矩阵 D \mathbf D D 可以估计每个目标的距离和相对速度。具体而言,对矩阵 D \mathbf D D 进行两次离散傅里叶变换(Discrete Fourier Transform, DFT):对每行应用大小为 N f N_f Nf 的 DFT,对每列应用大小为 N N N 的逆 DFT(Inverse DFT, IDFT),得到矩阵 Z = I D F T [ D F T [ D ] ] \mathbf Z=\mathrm{IDFT}[\mathrm{DFT}[\mathbf D]] Z=IDFT[DFT[D]],其中包含距离和相对速度估计结果。采用经典雷达处理算法获得的总处理增益 G P G_P GP 可表示为
G P = N N f . (42) G_P=NN_f. \tag{42} GP=NNf.(42)
A. ISAC 系统参数设置
本文基于 3GPP TR 38.901 [37] 中规定的 CDL 信道模型,实现了结合散射簇的 ISAC 信道模型。假设 ISAC 信号的发射与接收均在 CDL 多径环境中实现。仿真中,本文同时考虑单目标和多目标场景。在单目标场景中,假设目标到 BS 的距离、相对速度和方位角分别为 50 m、15 m/s 和 5 ∘ 5^\circ 5∘。在全局坐标系中,ISAC 收发机位于原点,目标位于 ( 50 m , 0 m , 0 m ) (50\ \mathrm m,0\ \mathrm m,0\ \mathrm m) (50 m,0 m,0 m)。在多目标场景中,环境中考虑三个目标。具体地,目标 1-3 的距离、相对速度和方位角分别为:目标 1 ( 30 m , 35 m / s , − 5 ∘ ) (30\ \mathrm m,35\ \mathrm{m/s},-5^\circ) (30 m,35 m/s,−5∘),目标 2 ( 50 m , − 15 m / s , − 30 ∘ ) (50\ \mathrm m,-15\ \mathrm{m/s},-30^\circ) (50 m,−15 m/s,−30∘),目标 3 ( 80 m , 10 m / s , 20 ∘ ) (80\ \mathrm m,10\ \mathrm{m/s},20^\circ) (80 m,10 m/s,20∘)。目标和散射簇的 RCS 分别设置为 σ R C S = 25 d B m 2 \sigma_{\mathrm{RCS}}=25\ \mathrm{dBm}^2 σRCS=25 dBm2, σ R C S , C l u s t e r , i ∈ U [ − 10 , 10 ] d B m 2 \sigma_{\mathrm{RCS,Cluster},i}\in U[-10,10]\ \mathrm{dBm}^2 σRCS,Cluster,i∈U[−10,10] dBm2, i = 1 , 2 , … , I i=1,2,\ldots,I i=1,2,…,I。对于更加实际的场景,可以采用 Swerling 的经典目标建模研究,利用其提出的四类统计目标 RCS 模型,灵活应用于不同场景 [41]。ISAC 系统整体参数如 TABLE I 所示。
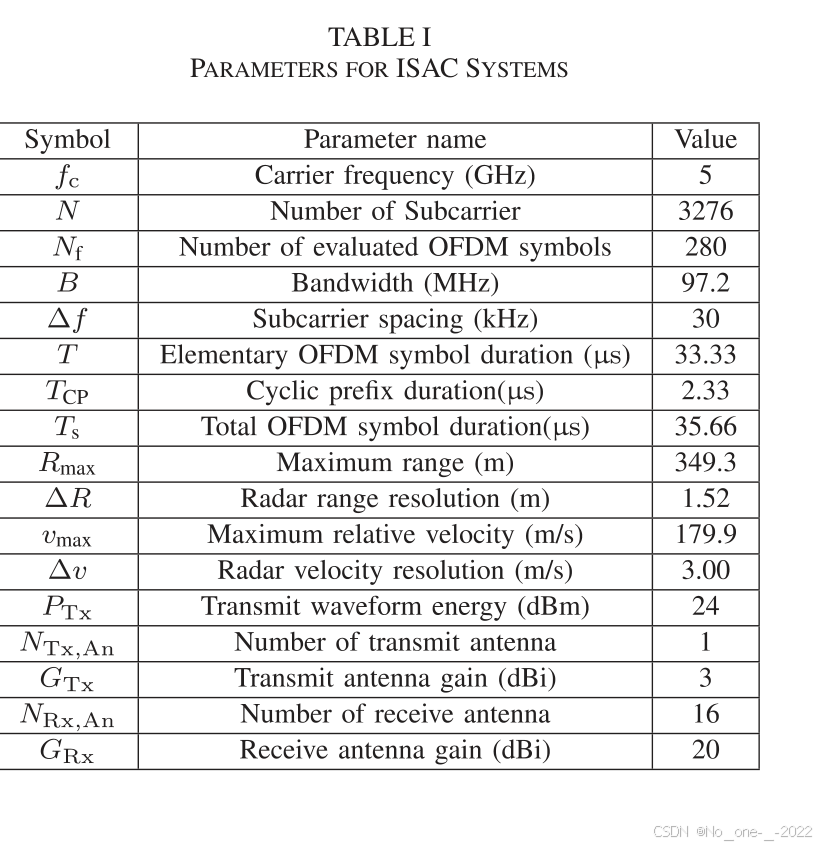
TABLE I. ISAC 系统参数。
B. 仿真结果分析
本节研究本文提出的 ISAC 信道模型的雷达感知性能。首先,基于 3GPP 通信信道模型和前文提出的方法,构建散射簇的三维位置。在确定这些散射簇之后,在 CDL 多径信道中开展雷达感知仿真,以验证多径条件对雷达感知性能的影响。
1. 散射簇仿真:Fig. 8 给出了一个示例,展示了在 CDL-D 模型下,针对单目标场景,使用所提出方案生成的散射簇三维位置,其中每个散射簇包含三个散射体。从图中可以看出,散射簇 1-3 具有相近的三维位置,散射簇 4-6 也有类似现象。更极端地,散射簇 1 中的三个散射体几乎重合。这是因为这些 NLOS 路径中的时延 τ \tau τ 很小且彼此相近。因此,这些构建出的散射簇位于具有相同焦点的椭圆轮廓上,但长轴略有不同。
注:
这一小节展示的是散射簇位置的“几何构造/反推”。 作者并不是从真实环境中直接测得散射体坐标,而是以 3GPP CDL-D、CDL-E 等信道模型给出的 NLOS 路径参数为输入,包括时延 τ \tau τ、AOD/ZOD 等角度信息;再结合前文的椭圆几何关系,构造出与这些时延和角度一致的散射簇三维位置。因此,Fig. 8 和 Fig. 9 可以理解为:不同 CDL 模型参数经过本文方法映射到空间后,对应得到的散射簇分布。
为什么说“相同焦点,但长轴略有不同”。 在本文的几何构建中,椭圆的两个焦点分别是 BS 和目标,二者距离为 R R R,所以焦点位置固定。椭圆上任一点到两个焦点的距离和恒定,即 d 1 + d 2 = 2 a d_1+d_2=2a d1+d2=2a,而式 (9) 给出 2 a = d 1 + d 2 = R + c τ 2a=d_1+d_2=R+c\tau 2a=d1+d2=R+cτ。因此,不同 NLOS 路径的时延 τ \tau τ 决定不同的长轴 2 a 2a 2a;若这些 τ \tau τ 很小且彼此接近,则对应椭圆的长轴只会略有差异。
短轴不是独立说明的量。 对共焦椭圆,半焦距为 R / 2 R/2 R/2,长半轴 a a a 与短半轴 b b b 满足 b 2 = a 2 − ( R / 2 ) 2 b^2=a^2-(R/2)^2 b2=a2−(R/2)2。因此当焦点固定时,只要长轴 2 a 2a 2a 确定,短轴 2 b 2b 2b 也随之确定。作者强调“长轴略有不同”,是因为时延直接控制的是距离和 d 1 + d 2 = 2 a d_1+d_2=2a d1+d2=2a;短轴虽然也会变化,但它是由长轴和焦点距离自动推出来的。
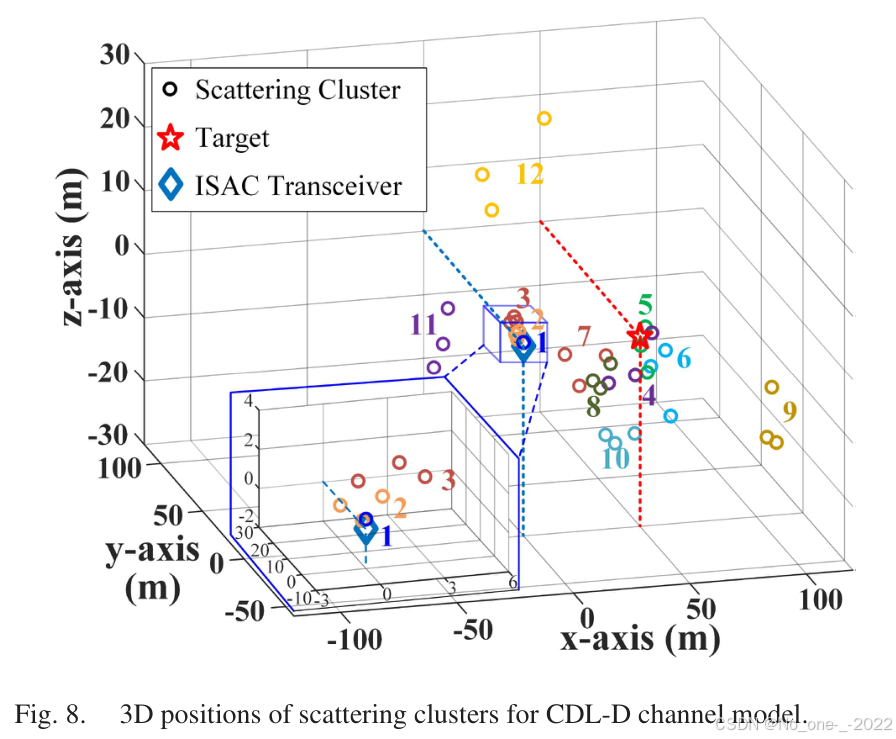
Fig. 8. CDL-D 信道模型中散射簇的三维位置。
Fig. 9 给出了 CDL-E 模型中单目标对应散射簇三维位置的示例。可以看出,不同于 Fig. 8,散射簇几乎都生成在 z = 0 z=0 z=0 平面下方,这是由 CDL-E 信道模型的角度信息决定的。与 Fig. 8 类似,由于时延 τ \tau τ 很小,一些散射簇具有相近的三维位置。Fig. 8 和 Fig. 9 能够较合理地反映真实环境中的散射簇。
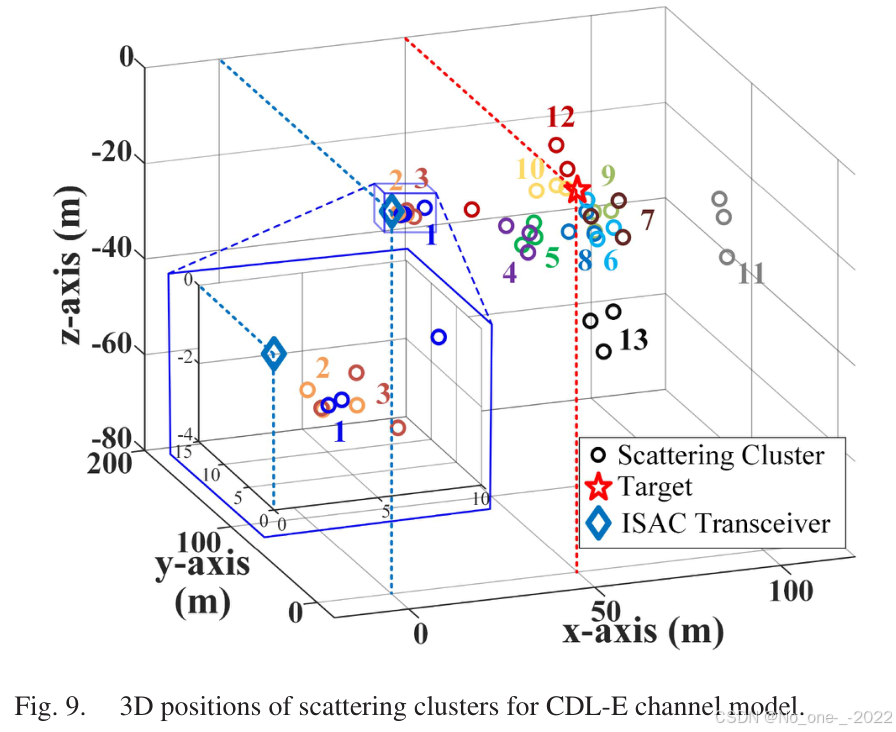
Fig. 9. CDL-E 信道模型中散射簇的三维位置。
2. ISAC 雷达感知信道模型仿真:在确定 CDL-E 信道模型中散射簇的三维位置后,本文开展雷达感知仿真,以验证多径条件对 ISAC 系统雷达感知性能的影响。Fig. 10 显示了考虑散射簇影响时,多径环境中单目标的雷达图像。不失一般性,所有仿真结果均经过归一化,使得 30 m 距离处 σ R C S = 0 d B m 2 \sigma_{\mathrm{RCS}}=0\ \mathrm{dBm}^2 σRCS=0 dBm2 对应 0 dB。散射簇的具体影响是,雷达图像中会产生多个与真实目标速度相同、但距离不同的鬼影目标峰。
注:
“同速度、不同距离”的含义。 雷达图像中的距离由回波总时延决定,而速度由多普勒决定。散射簇引入多径后,同一个真实运动目标可以通过不同路径返回,例如 BS → Cluster → Target → BS \text{BS}\rightarrow\text{Cluster}\rightarrow\text{Target}\rightarrow\text{BS} BS→Cluster→Target→BS 或 BS → Cluster i → Target → Cluster j → BS \text{BS}\rightarrow\text{Cluster}_i\rightarrow\text{Target}\rightarrow\text{Cluster}_j\rightarrow\text{BS} BS→Clusteri→Target→Clusterj→BS。这些路径的总长度不同,因此会在不同距离单元产生峰;但它们都经过同一个运动目标,所以多普勒与真实目标运动相关,表现为速度维度接近真实目标速度。
严格来说,多普勒不一定完全相同。 文章确实声称散射簇会产生多个“与真实目标速度相同、但距离不同”的 ghost peaks,但文中没有给出充分的物理推导来证明这些 ghost peaks 必然落在同一个 velocity bin。多普勒本质上由整条传播路径长度 L ( t ) L(t) L(t) 的一阶导数决定,即 f D ∝ − 1 λ d L ( t ) d t f_D\propto -\frac{1}{\lambda}\frac{dL(t)}{dt} fD∝−λ1dtdL(t)。不同散射簇对应不同路径几何, d L ( t ) / d t dL(t)/dt dL(t)/dt 一般并不完全相同,所以该结论在严格物理上通常不必然成立。
更稳妥的理解是:文中“同速度”可能来自仿真或处理层面的简化,例如作者让 clutter / ghost echoes 继承了真实目标的 Doppler;或者不同多径路径的 Doppler 差异小于速度分辨率,因此在 2DFFT 雷达图像中落入同一个 velocity bin。
纯静态杂波需要区分。 若只是 BS → Cluster → BS \text{BS}\rightarrow\text{Cluster}\rightarrow\text{BS} BS→Cluster→BS 且 BS 与散射簇都静止,则路径长度不随时间变化,理论多普勒应接近 0。能够产生“接近真实目标速度”的鬼影峰的,更合理理解是经过运动目标的 NLOS 多径回波,而不是单纯静态散射簇杂波。
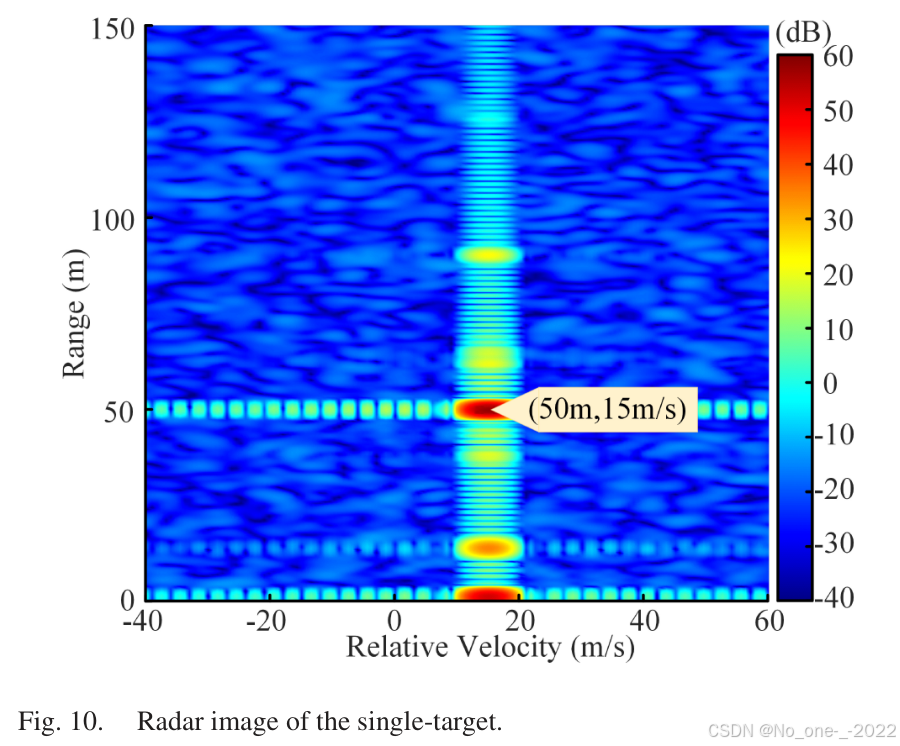
Fig. 10. 单目标雷达图像。
为了展示散射簇导致的雷达图像鬼影目标,Fig. 11 给出了单目标的距离剖面。从图中可以看出,目标峰值幅度比最大鬼影目标峰值约高 22.8 dB。在确定真实目标峰值时,首先排除距离很小的目标峰,因为这些峰可以确定为由散射簇产生的鬼影目标峰。最后,通过获得雷达图像中的峰值来确定目标位置。
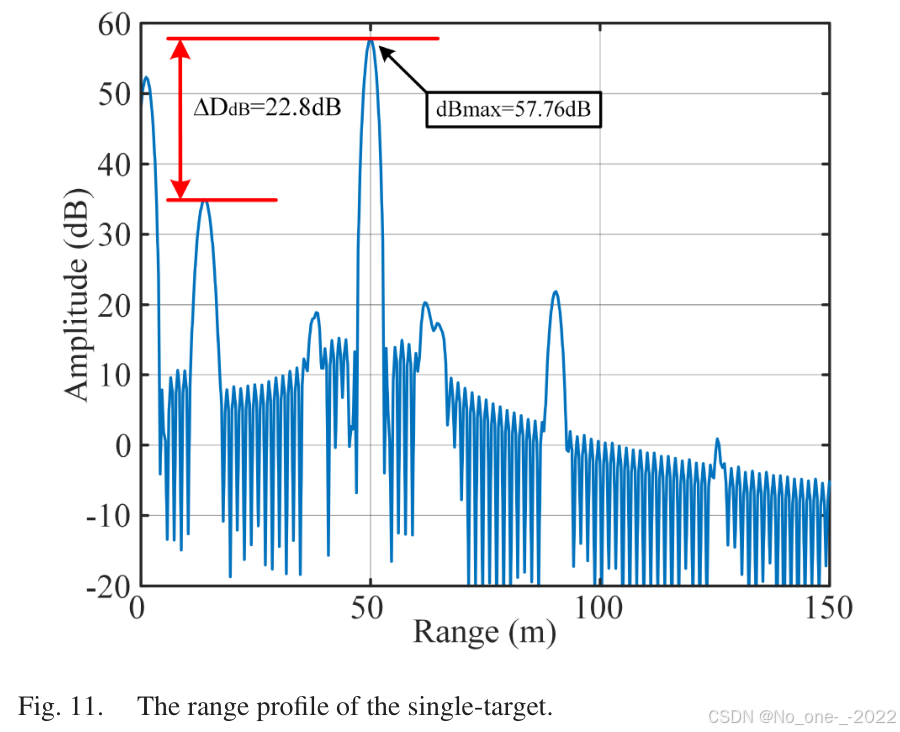
Fig. 11. 单目标距离剖面。
在接收到 ISAC 雷达感知回波信号后,BS 使用 MUSIC 算法估计目标方位。在单目标感知情况下,MUSIC 算法得到的真实目标方位可以与经典雷达处理算法获得的相对速度和距离信息相匹配,如 Fig. 12 所示。
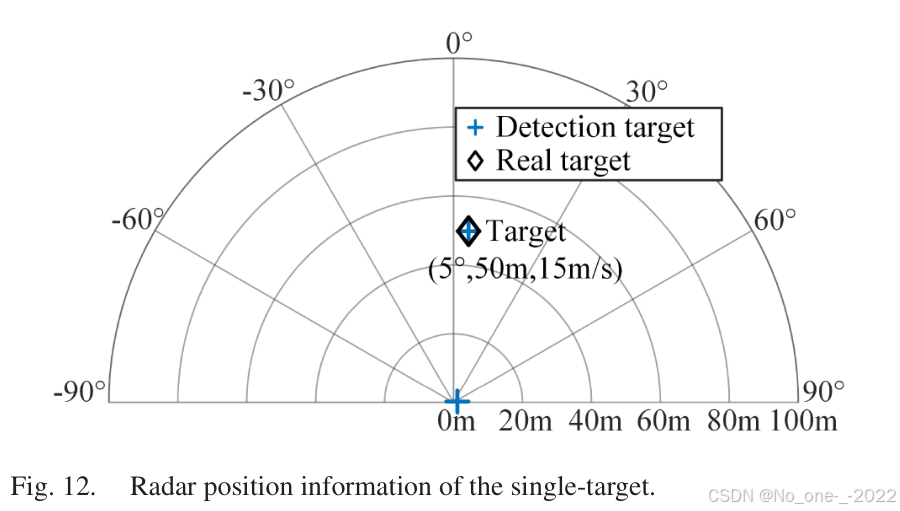
Fig. 12. 单目标雷达位置信息。
接下来给出多目标场景的评估结果。Fig. 13 显示了 BS 处的多目标雷达图像。目标 1-3 的峰值分别为 66.53 dB、57.76 dB 和 51.30 dB。绿色标记的峰值是由非常接近收发机的散射簇产生的杂波峰。如前所述,这些峰被认为是鬼影峰。
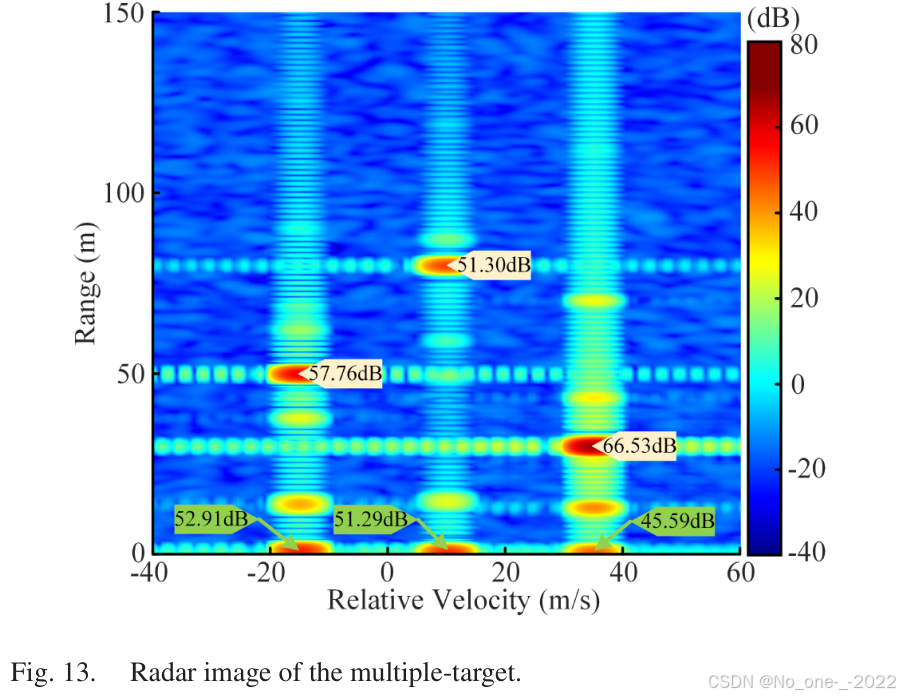
Fig. 13. 多目标雷达图像。
Fig. 14-Fig. 16 分别给出三个目标的峰值剖面。可以看出,目标 1-3 的目标峰与最高鬼警峰之间的差距分别为 25.16 dB、19.37 dB 和 25.22 dB。
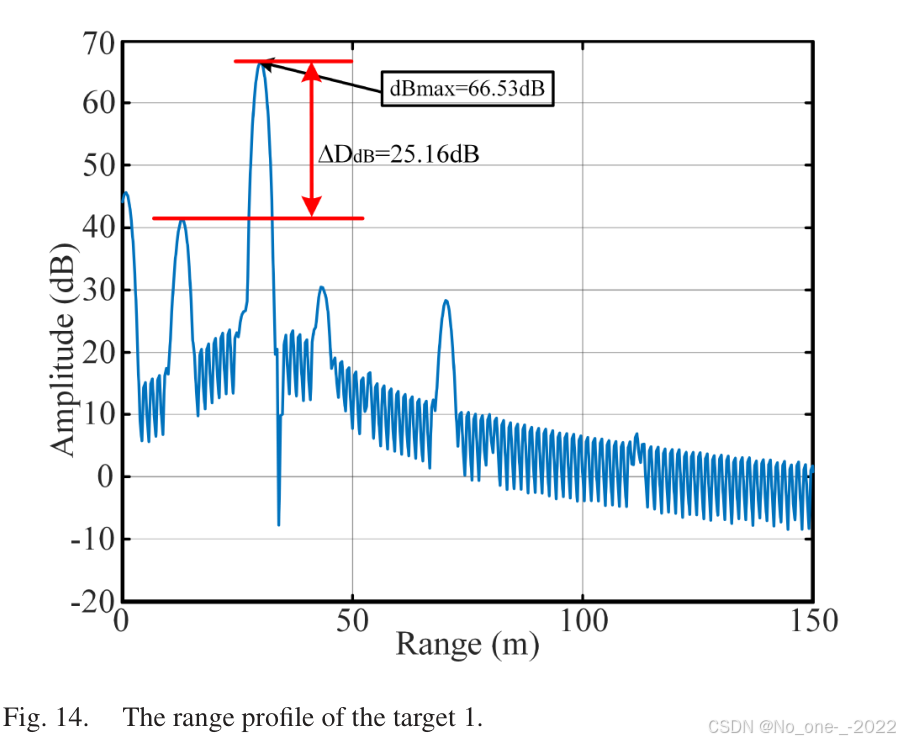
Fig. 14. 目标 1 的距离剖面。
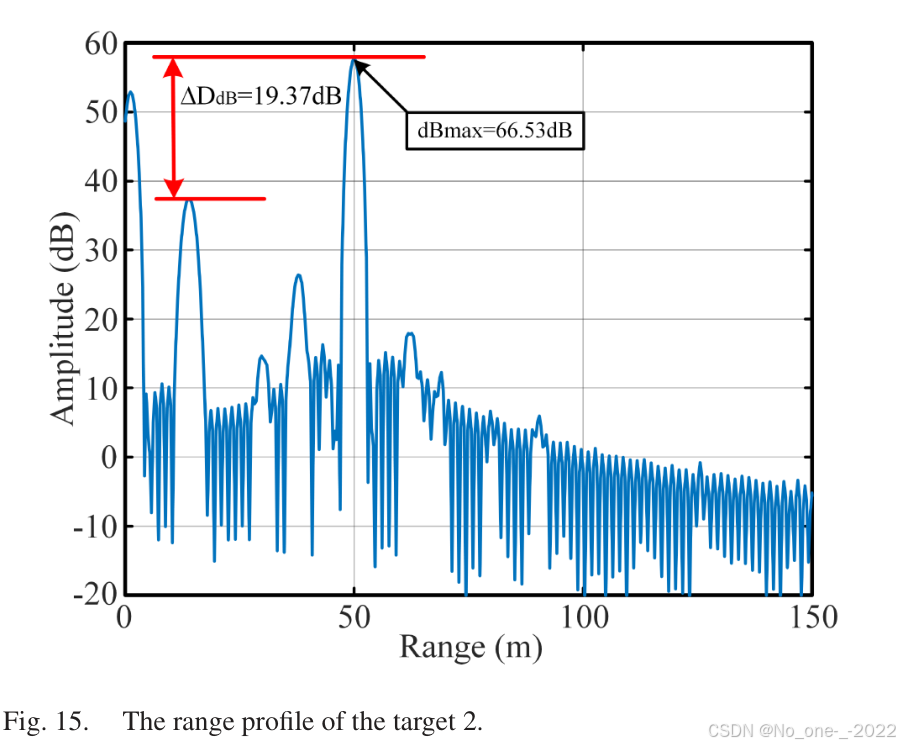
Fig. 15. 目标 2 的距离剖面。
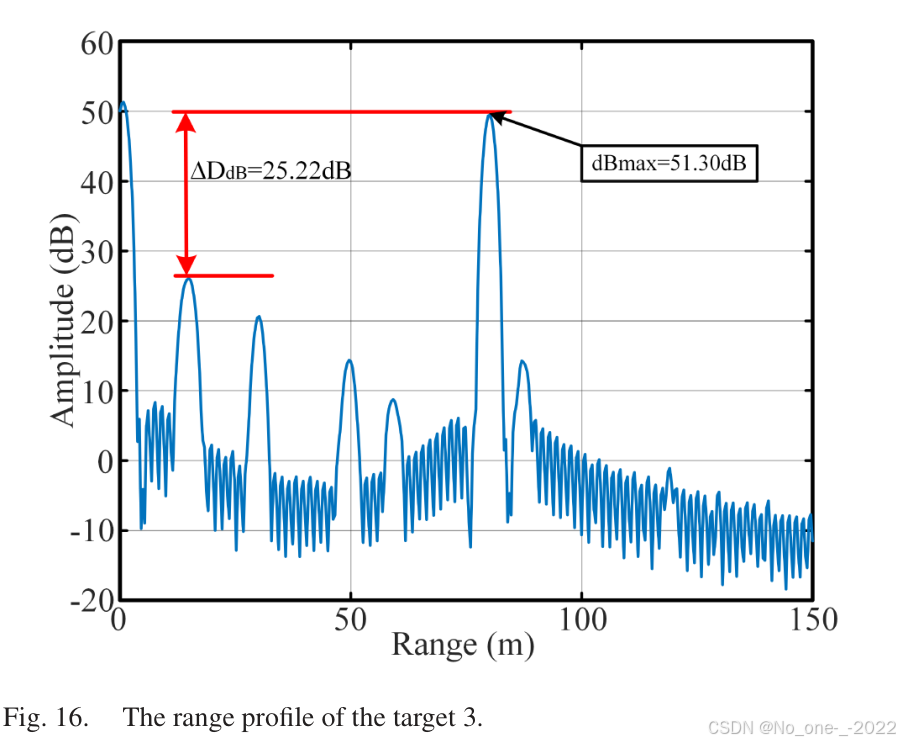
Fig. 16. 目标 3 的距离剖面。
此外,Fig. 17 展示了由 MUSIC 角度估计算法获得的多目标角度信息与各目标距离和速度之间的匹配结果。所使用的匹配算法是最大似然匹配算法,该算法能够在复杂多径条件下有效匹配部分目标。
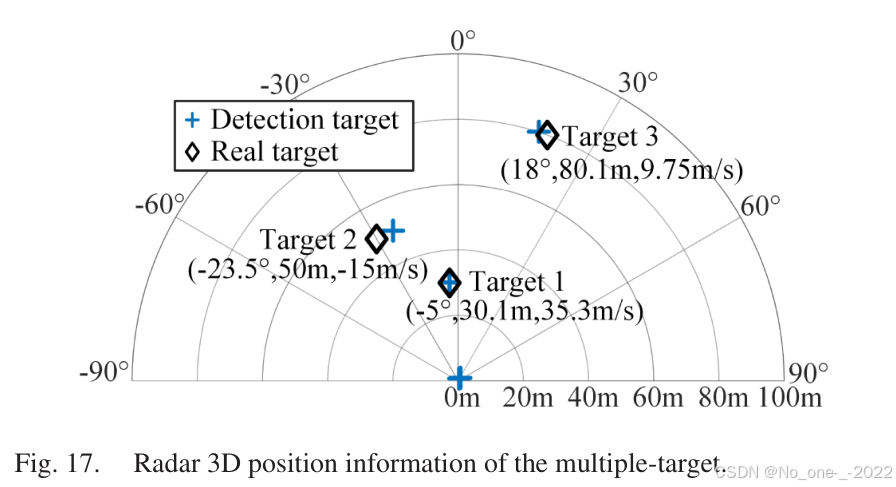
Fig. 17. 多目标雷达三维位置信息。
因此可以推断,在多径环境中,远距离目标可能被近距离目标产生的鬼影目标峰组遮蔽。上述问题是 ISAC 系统在多径条件下开展雷达感知操作时不可避免的挑战。为应对该挑战,需要针对 ISAC 系统采用的雷达感知算法开展深入研究,特别是面向这些多径干扰问题的检测与分辨。
V. 结论
本文提出了一种结合散射簇的 ISAC 信道模型新框架。该框架以兼容方式将雷达感知能力集成到 3GPP 通信信道模型中。该框架的特点是确定多径信道中散射簇的位置并建立其三维位置。随后,本文对环境信号回波进行综合分析,包括 LOS、NLOS 和杂波回波,以推导精确的 ISAC 信道响应。本文采用标准 CDL 模型仿真多径场景,研究这些信道中的散射簇如何影响 ISAC 系统的感知性能。该研究为 6G 标准化发展框架下 ISAC 技术的持续探索与评估提供了关键见解和支撑。
未来工作中,本文将围绕所提出的基础 ISAC 信道模型框架开展更加全面的研究。一个很有意义的方向是考虑在较长时间的感知过程中,环境中簇的出生和消亡如何改变通信信道与感知信道之间的相关性。此外,将更加通用的起伏 RCS 模型与散射动态结合到 ISAC 系统中,可以为 ISAC 系统设计与优化提供更加准确和全面的理论支撑。进一步地,本文将分析 ISAC 信道,研究当感知目标以高速移动或沿特定轨迹运动时,信道特性例如非平稳性的变化。最后,在更广泛的典型场景中开展 ISAC 信道建模,例如室内场景、工业物联网等,也具有重要价值,因为这将有助于进一步完善 ISAC 信道模型。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 6
6 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)