yolo模型训练及部署过程
第一部分:项目全流程概览
1.1 核心工作流架构
深度学习项目遵循系统化开发流程,确保可重复性和高效迭代:
数据采集 → 预处理 → 标注 → 数据集管理 → 模型训练 → 评估 → 部署
1.2 环境配置最佳实践
GPU环境配置要点:
-
CUDA版本匹配:显卡驱动CUDA版本 ≥ PyTorch所需CUDA版本
-
虚拟环境隔离:为每个项目创建独立环境
-
版本一致性:记录所有依赖包版本,便于复现
推荐配置命令:
# 创建环境
conda create -n dl_project python=3.8 -y
conda activate dl_project
# 安装PyTorch(示例,以官网为准)
pip install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu118
# 安装YOLOv8
pip install ultralytics
第二部分:数据工程体系
2.1 数据采集标准化流程
硬件选型建议:
-
工业相机:全局快门,防果冻效应
-
分辨率:越大越好,确保细节捕捉
-
帧率:根据应用需求选择(检测快速移动目标需高帧率)
数据采集策略矩阵:
| 维度 | 具体方法 | 目的 |
| 视角多样性 | 俯视、仰视、平视 | 提高视角鲁棒性 |
| 光照条件 | 强光、弱光、背光、闪光 | 适应不同光照环境 |
| 距离变化 | 近距离特写、中距离、远距离 | 适应尺度变化 |
| 背景复杂度 | 简单背景、复杂背景、动态背景 | 提高泛化能力 |
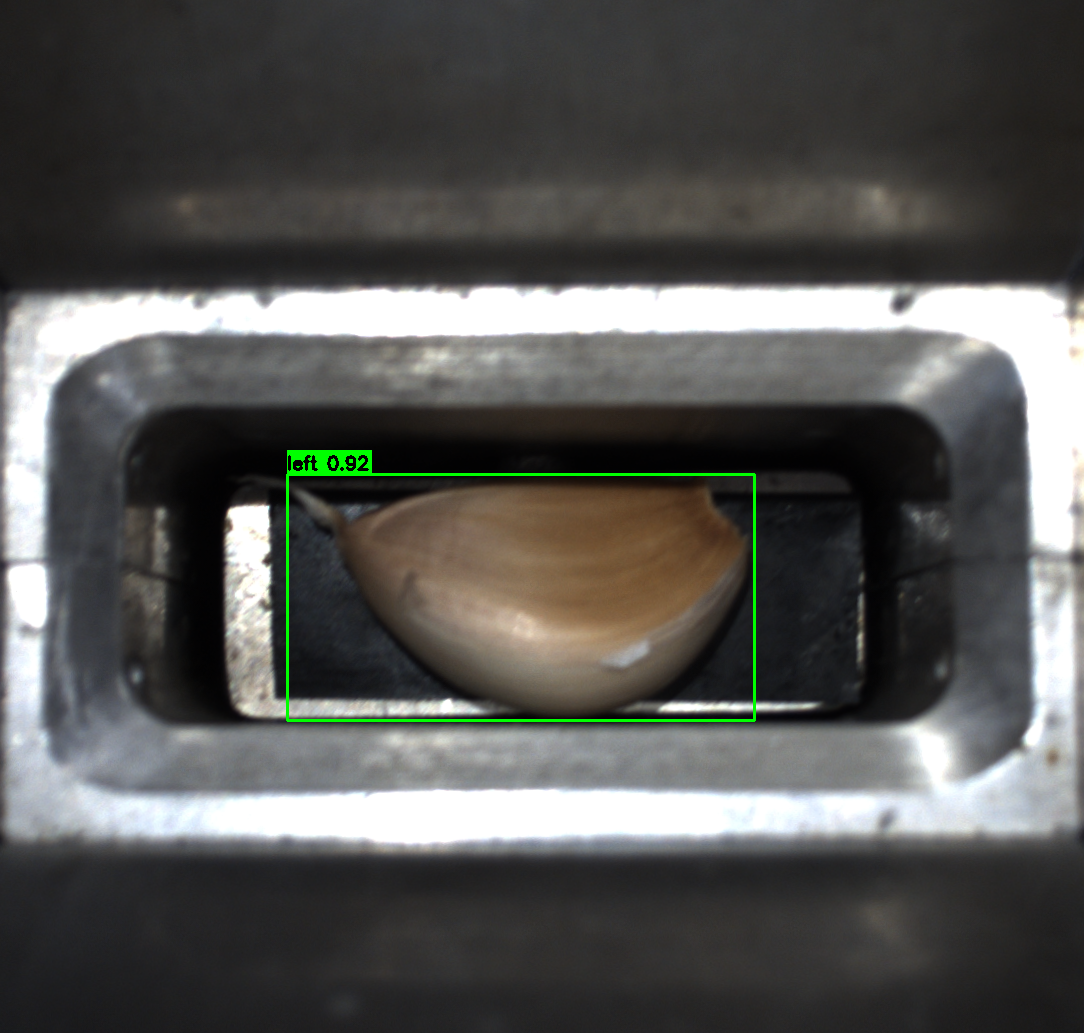
例如这是一个大蒜的数据集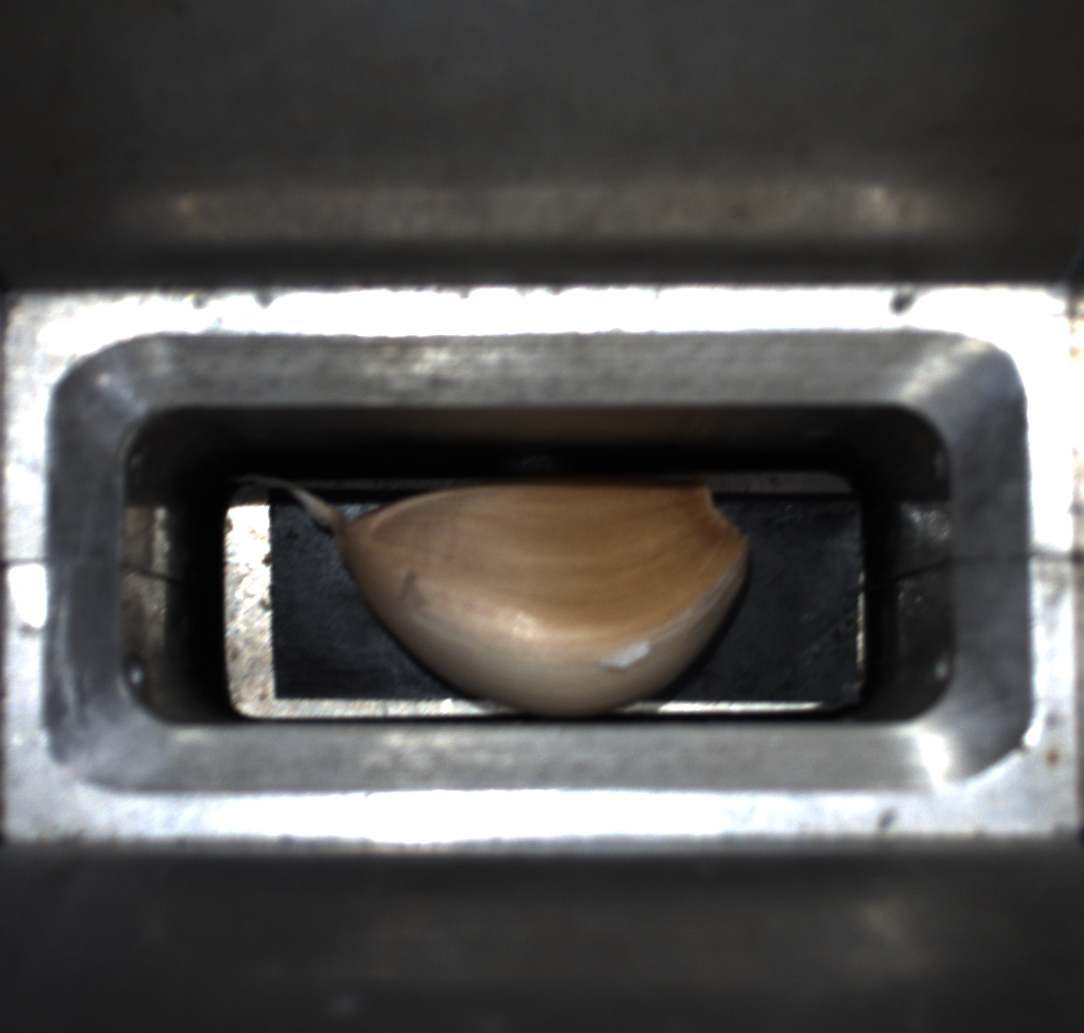
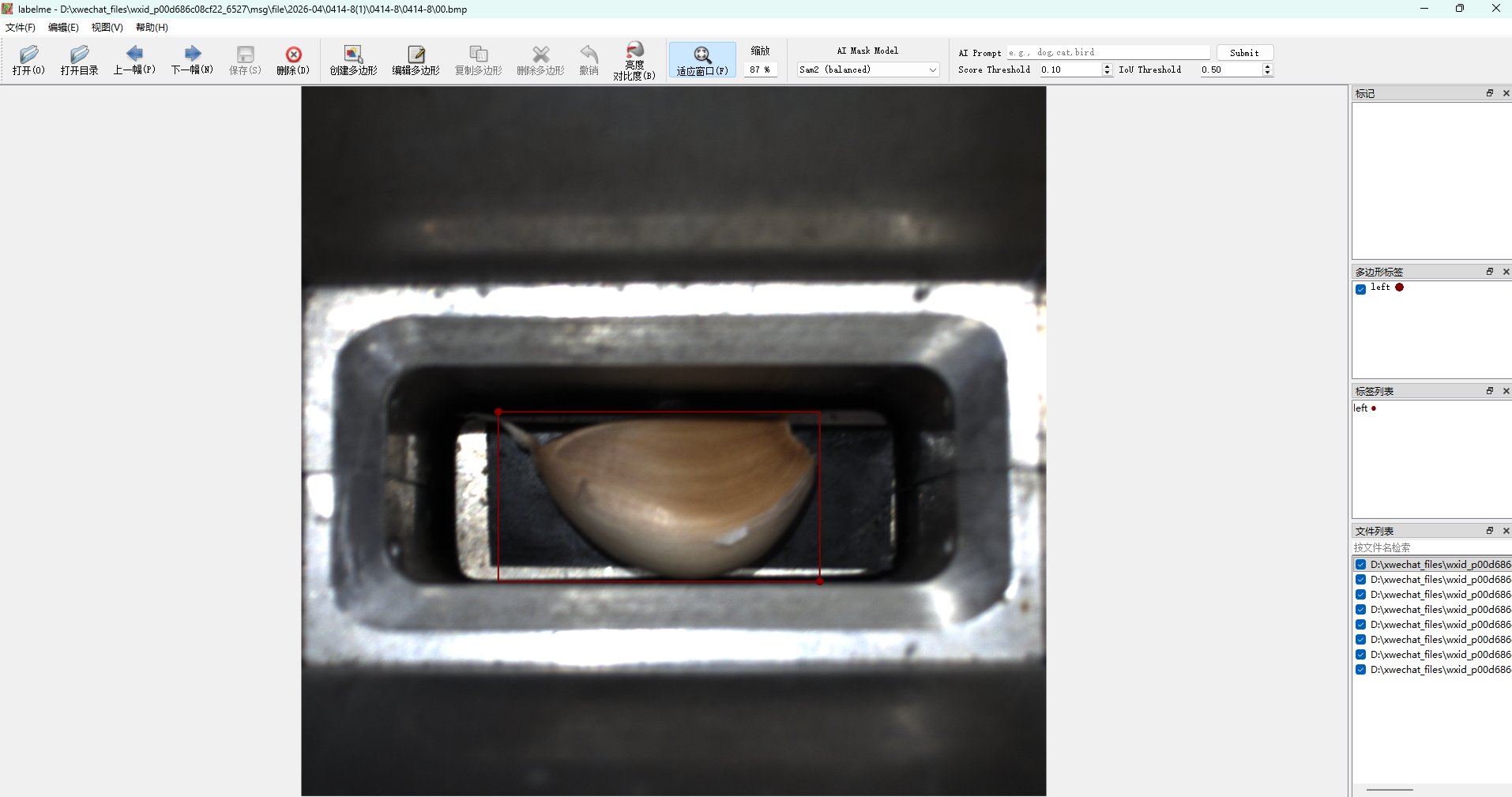
2.2 数据标注专业指南
使用labelme软件进行标注![]()
YOLO格式深入解析:
类别ID 中心点X归一化 中心点Y归一化 宽度归一化 高度归一化
归一化公式详解:
-
x_box = 框左上角的 x 坐标
y_box = 框左上角的 y 坐标
w_box = 框的宽度
h_box = 框的高度
归一化的核心优势:
-
尺度不变性:模型学习的是相对位置关系
-
分辨率灵活性:同一模型可处理不同分辨率输入
-
数值稳定性:所有坐标值在[0,1]范围内
-
在labelme中的标注 1.检查标签格式类型、数量与图片数量,一般txt标签用labimg标完后,会有个classes.txt文件,要删掉,其次,要开启按文件大小排列,检查空的txt标签,将其删掉,再用代码删除多余标签与jpg图片(注意路径不能写错否则会把图片或者标签全部删除) 2.统计标签类别个数正确没有类别标错后,抠图出来检查标的标签是否与抠出来的图相符。3.将所有标签复制到一个文件夹下的labels,所有图片复制到images文件夹下 4.按比例划分数据集,大数据集可以采用7:2:1的方式划分训练集验证集测试集,中小数据可以直接按照8:2划分训练集去划分训练集与测试集。 5.划分完成后,修改yaml文件的验证集测试集的路径(注意是在云端服务器上的路径),修改类别数nc,修改类别标签。6.将其打包压缩成zip格式的压缩包上传
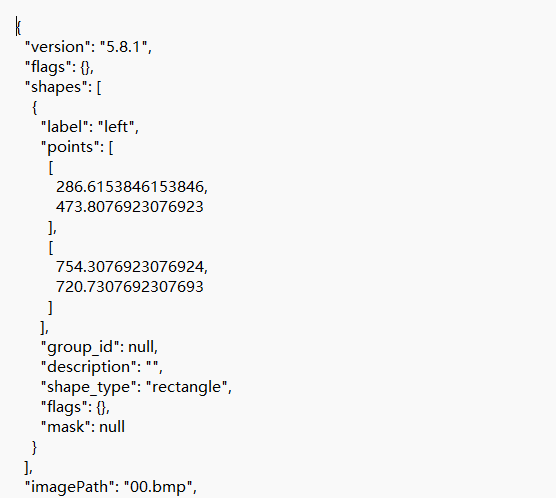
标注后拿到的json文件
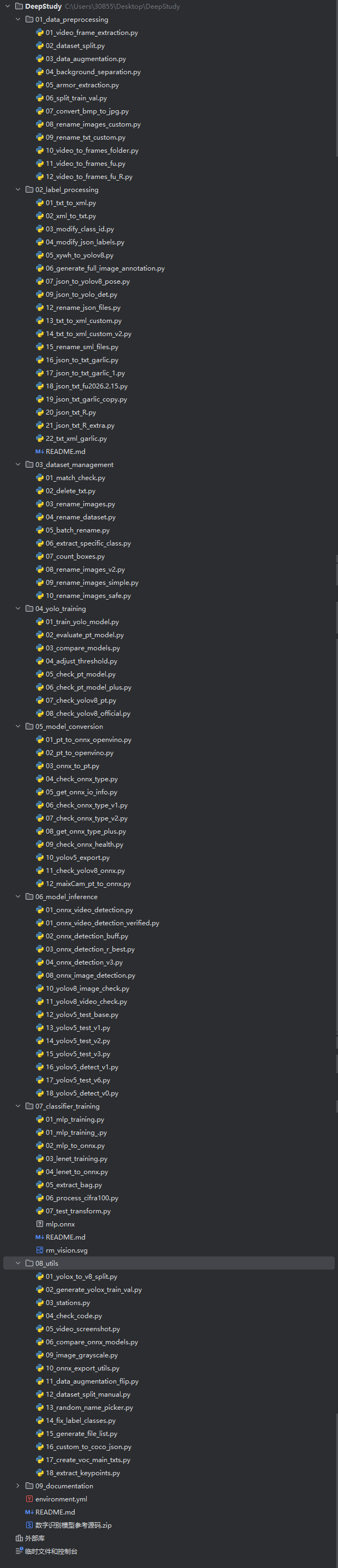
关于数据集操作的python代码:
2.3 数据增强策略库
自动增强(YOLO内置):
-
Mosaic增强:四图拼接,提升小目标检测
-
MixUp:图像混合,提升鲁棒性
-
HSV调整:模拟不同光照条件
-
几何变换:旋转、缩放、裁剪
手动增强(特殊需求):
# 自定义增强示例
import albumentations as A
transform = A.Compose([
A.RandomRotate90(p=0.5),
A.RandomBrightnessContrast(p=0.2),
A.GaussNoise(p=0.3),
])
2.4 ROI(感兴趣区域)技术详解
ROI概念与价值:
-
定义:在图像中划定特定区域,仅对该区域进行处理
-
核心价值:
-
计算效率:减少处理像素数量
-
精度提升:避免背景干扰
-
资源优化:在有限硬件上实现复杂任务
-
ROI应用模式:
-
两级检测架构:
第一级:YOLO检测 → 获取ROI坐标
第二级:ROI裁剪 → 分类器识别
-
代码实现示例:
def extract_roi(image, bbox):
"""根据bbox裁剪ROI区域"""
x1, y1, x2, y2 = bbox
roi = image[y1:y2, x1:x2]
return roi
# 应用场景:装甲板数字识别
detections = yolo_model(image) # 一级检测
for det in detections:
if det.class_id == "armor":
roi = extract_roi(image, det.bbox)
number = classifier(roi) # 二级分类
第三部分:模型架构与原理
3.1 卷积神经网络(CNN)核心组件
卷积层(Convolutional Layer):
-
核心作用:特征提取,通过滑动窗口学习局部模式
-
关键参数:
-
卷积核:3×3、5×5等,决定感受野大小
-
步长(Stride):决定滑动步幅,影响输出尺寸
-
填充(Padding):保持输入输出尺寸一致
-
通道数:决定提取特征的种类数量
-
批量归一化(Batch Normalization):
-
问题背景:Internal Covariate Shift(内部协变量偏移)
-
解决方案:对每层输入进行标准化
-
核心优势:
-
加速训练收敛
-
允许使用更大学习率
-
提供轻微正则化效果
-
ResNet(残差网络):
-
核心创新:跳跃连接(Skip Connection)
-
残差块结构:y = F(x) + x
-
解决的核心问题:深度网络梯度消失
-
YOLOv8中的应用:C2f模块借鉴了残差思想
3.2 视觉任务全家桶
最常见的是目标检测(Object Detection):
-
任务:定位(框位置) + 分类(是什么)
-
代表算法:YOLO系列、SSD、R-CNN系列
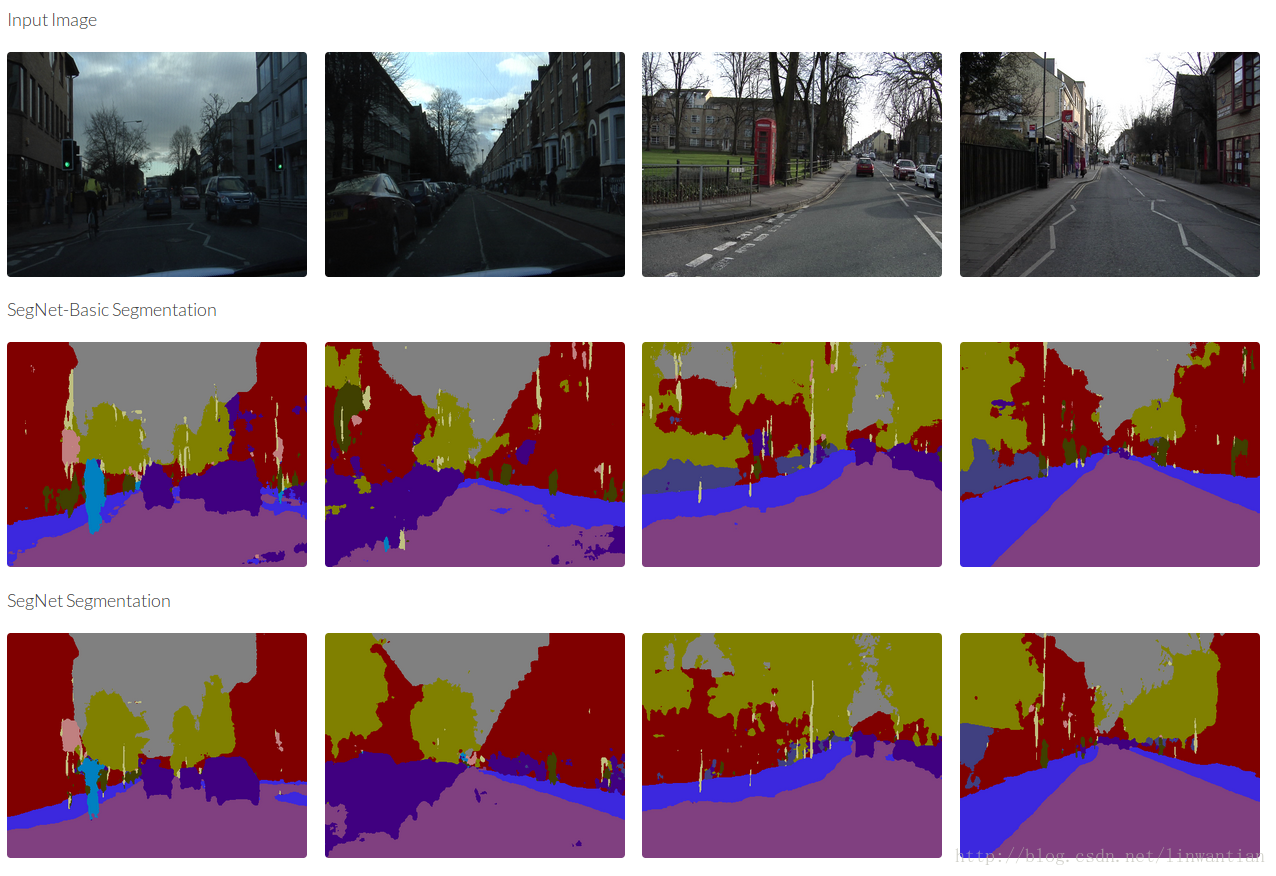
然后还有语义分割(Semantic Segmentation):
-
任务:像素级分类,不区分个体
-
输入:图像 → 输出:相同尺寸的分类图
-
应用场景:
-
道路分割(区分路面、人行道、车辆)
-
医疗影像(区分正常组织与病变区域)
-
-
与实例分割的区别:
-
语义分割:所有"车"像素标记为同一类别
实例分割:每辆车标记为不同实例
姿态估计(Pose Estimation):

-
任务:检测关键点并连接成骨架
-
YOLOv8-pose:检测+姿态一体化
-
应用:能量机关R标定位、人体姿态分析
3.3 目标检测算法演进
两阶段检测器(R-CNN系列):
-
流程:区域提议 → 特征提取 → 分类回归
-
代表:R-CNN、Fast R-CNN、Faster R-CNN
-
特点:精度高,速度慢
单阶段检测器(SSD/YOLO):
-
流程:直接预测边界框和类别
-
SSD(Single Shot MultiBox Detector):
-
多尺度特征图预测
-
默认框(Default Boxes)机制
-
-
YOLO(You Only Look Once):
-
将检测视为回归问题
-
网格化预测,速度快
-
YOLO进化关键点:
-
v1-v3:锚框(Anchor)机制
-
v4:大量优化技巧集成
-
v5:工程化改进,易于部署
-
v8:锚框免费(Anchor-Free),解耦头
-
v11:微观算子打磨,多任务大一统
-
v26:剔除历史包袱,端到端架构落地
3.4 模型选择策略
根据硬件选择模型:
| 硬件平台 | 推荐模型 | 推理速度 | 精度 |
| 树莓派4B | YOLOv8n | 15-20 FPS | 中等 |
| Jetson Nano | YOLOv8s | 30-40 FPS | 良好 |
| RTX 3060笔记本 | YOLOv8m | 60+ FPS | 优秀 |
| RTX 4090服务器 | YOLOv8l/x | 100+ FPS | 顶尖 |
根据任务复杂度选择:
-
简单场景:少量类别,背景干净 → YOLOv8n/s
-
复杂场景:多类别,遮挡严重 → YOLOv8m/l
-
高精度要求:小目标检测,密集场景 → YOLOv8l/x
3.5 面向边缘的模型联合优化策略
对于机器人、无人机等边缘计算场景,模型必须在有限的计算资源、内存和功耗下实现高效推理。单一技术往往难以兼顾,联合优化成为关键。
-
内存-算力协同优化框架:结合量化感知训练和结构化模型剪枝,可以实现远超单一技术的优化效果。
-
量化感知训练:在训练中模拟低精度(如INT8)计算,让模型提前“适应”量化误差,精度损失通常小于1%。
-
结构化剪枝:移除网络中不重要的通道或层,直接减少参数和计算量。
-
联合效益:实验表明,通过联合优化可将模型体积和计算量压缩90% 以上,推理延迟降低10倍,同时将精度损失控制在2%以内。
第四部分:训练与优化
4.1 训练流程科学化
完整训练阶段:
-
热身阶段:3个epoch,学习率从0线性上升
-
主训练阶段:模型参数更新,损失下降
-
微调阶段:最后10个epoch,关闭马赛克增强
关键超参数设置:
| 参数 | 建议值 | 说明 |
| batch_size | 16/32/64 | 显存允许下越大越好 |
| workers | CPU核心数/2 | 数据加载线程数 |
| patience | 50-100 | 早停耐心值 |
| optimizer | SGD/AdamW | 大数据集SGD,小数据集AdamW |
| cos_lr | TRUE | 余弦退火学习率 |
4.2 过拟合与欠拟合诊断与解决
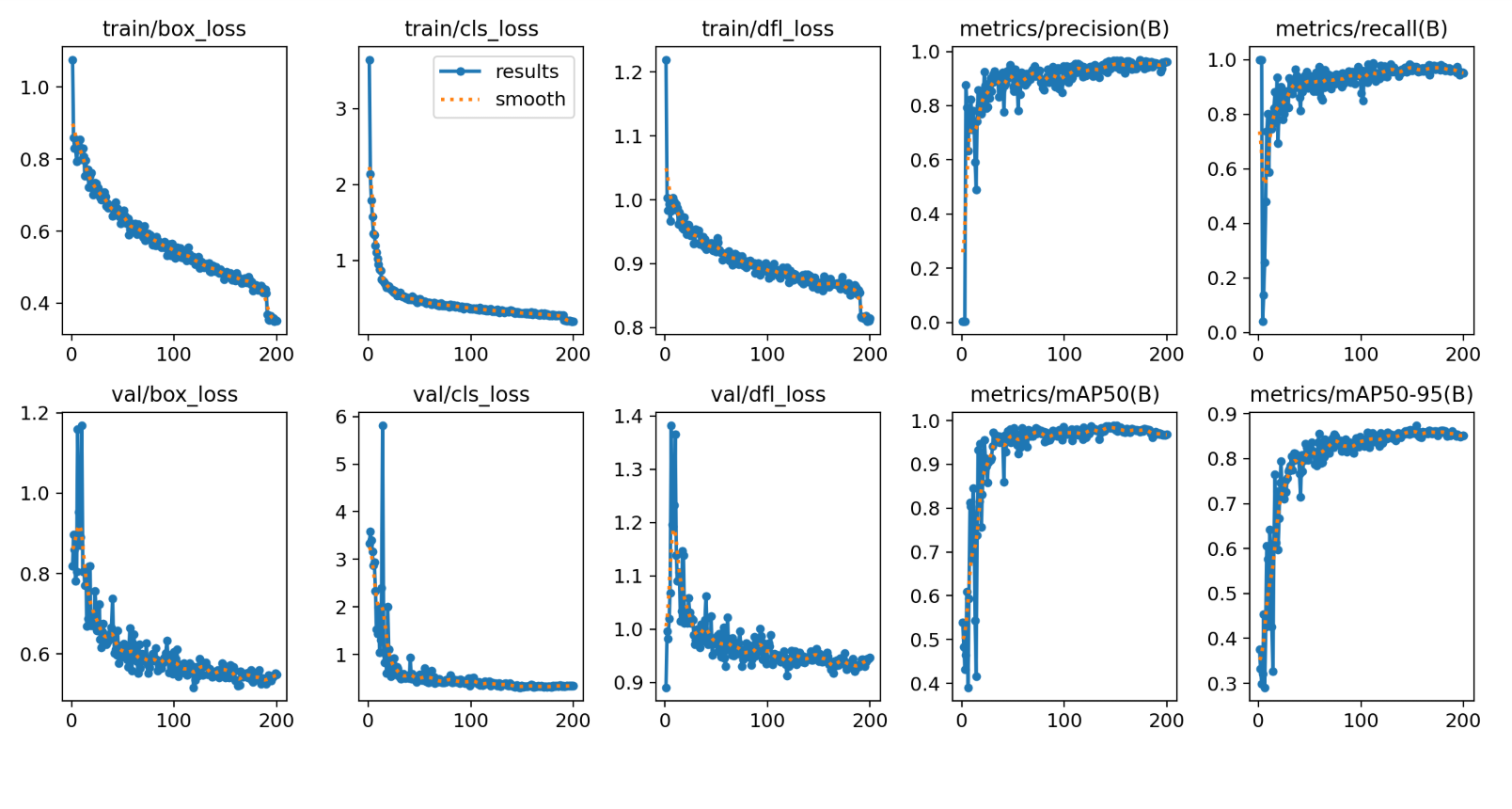
过拟合(Overfitting):
-
现象:训练损失低,验证损失高
-
根本原因:模型复杂度过高,记忆训练数据
-
诊断指标:Train Loss << Val Loss,mAP差异大
-
解决方案:
-
增加数据量(最有效)
-
数据增强(Mosaic、MixUp、CutMix)
-
正则化(权重衰减、Dropout)
-
早停(Early Stopping)
-
简化模型(使用更小模型)
-
欠拟合(Underfitting):
-
现象:训练损失和验证损失都高
-
根本原因:模型能力不足或训练不充分
-
诊断指标:Loss下降缓慢或停滞
-
解决方案:
-
增加模型复杂度(使用更大模型)
-
延长训练时间(增加epoch)
-
提高学习率
-
检查数据质量(标签是否正确)
-
减少正则化强度
-
4.3 SoftMax回归详解
特性与优势:
-
概率解释:输出可直接视为分类概率
-
可微性:便于梯度计算和反向传播
-
放大差异:高分更高,低分更低
-
多分类标准:几乎用于所有多分类任务
YOLO中的应用:
-
分类分支:每个锚点预测各类别概率
-
置信度计算:物体置信度 × 类别概率
第五部分:序列模型与语言处理
5.1 从视觉到序列的拓展
RNN(循环神经网络):
-
核心思想:引入时间维度,具有记忆功能
-
局限性:梯度消失/爆炸,长程依赖问题
LSTM(长短期记忆网络):
-
关键创新:门控机制
-
遗忘门:决定丢弃哪些信息
-
输入门:决定存储哪些新信息
-
输出门:决定输出什么信息
-
-
细胞状态:信息高速公路,梯度可无损传递
-
应用场景:时间序列预测、文本生成
5.2 注意力机制革命
核心概念:
-
核心思想:动态权重分配,关注重要信息
-
自注意力公式: Attention(Q,K,V) = softmax(\frac{QK^T}{\sqrt{d_k}})V
-
Q:查询(我想要什么)
-
K:键(你有什么)
-
V:值(实际内容)
-
视觉注意力:
-
空间注意力:关注图像的特定区域
-
通道注意力:关注特征图的特定通道
-
应用:帮助模型关注关键特征,提升小目标检测
5.3 语言模型与语音模型
语言模型(Language Model):
-
核心任务:预测下一个词的概率分布
-
数学表达:P(w_t | w_1, w_2, ..., w_{t-1})
-
现代LLM:基于Transformer的生成式预训练模型
-
应用:文本生成、翻译、代码补全
语音模型(Speech Model):
-
与语言模型的关系:将音频信号视为"听觉语言"
-
关键技术:
-
音频编码:将波形转为频谱图或特征向量
-
序列建模:使用CNN+Transformer处理时间序列
-
解码:转为文本或直接理解
-
-
应用:语音识别、语音合成、语音情感分析
多模态融合:
-
视觉+语言:图像描述、视觉问答
-
语音+视觉:唇语识别、多模态情感分析
-
发展趋势:统一的多模态大模型
第六部分:评估与部署
6.1 专业评估指标体系
目标检测核心指标:
| 指标 | 公式/定义 | 适用场景 |
| mAP50 | IoU阈值0.5的平均精度 | 实时检测,如RoboMaster |
| mAP50-95 | IoU阈值0.5-0.95的平均 | 高精度要求,如医疗 |
| Precision | TP/(TP+FP) | 强调误报率低的场景 |
| Recall | TP/(TP+FN) | 强调漏检率低的场景 |
| F1-Score | 2×P×R/(P+R) | 平衡精确率和召回率 |
混淆矩阵分析:
-
对角线:正确分类的比例
-
非对角线:混淆情况(A类误认为B类)
-
应用:发现模型特定弱点,针对性改进
6.2 部署优化策略
模型导出最佳实践:
from ultralytics import YOLO
model = YOLO('best.pt')
# 针对不同 Runtime 的导出建议
# 1. 通用 ONNX (适用于 ONNX Runtime, OpenVINO)
model.export(format='onnx', opset=11, simplify=True)
# 2. 针对 TensorRT (注意:通常建议直接用 Ultralytics 的 engine 导出)
# model.export(format='engine', half=True) # FP16 模式,速度快
# 3. 针对 OpenVINO
# model.export(format='openvino')
推理优化技术:
| 技术 | 精度损失 | 速度提升 | 适用场景 |
| FP32 | 无 | 基准 | 精度优先 |
| FP16 | 极小 | 1.5-2× | 平衡场景 |
| INT8 | 中等 | 2-3× | 速度优先 |
| 模型剪枝 | 可控 | 1.5-2× | 边缘设备 |
| 知识蒸馏 | 小 | 1.2-1.5× | 模型压缩 |
6.3 全链路质量保障
测试策略:
-
单元测试:每个脚本功能验证
-
集成测试:全流程打通测试
-
压力测试:高负载下的稳定性
-
A/B测试:新旧模型对比
监控指标:
-
推理延迟:端到端处理时间
-
吞吐量:单位时间处理数量
-
资源使用:CPU/GPU/内存占用
-
准确率跟踪:线上数据性能监控
6.4 边缘与移动端的深度部署优化
将模型部署到资源受限的设备时,需要在转换、压缩和硬件适配各环节精细优化。
-
模型转换与算子兼容
-
格式选择:
ONNX通用性好;TorchScript在PyTorch生态内损耗低。 -
常见问题:遇到不支持的算子时,需进行算子替换或图优化(如常量折叠、移除训练专用层)。
-
硬件感知的性能榨取
-
CPU优化:利用
NEON指令集实现向量化计算,并通过多线程调度平衡负载。 -
GPU优化:利用纹理内存和计算着色器优化并行计算。
-
专用AI加速器:针对
NPU进行算子融合和数据布局转换,能大幅提升能效。
自动化编译优化:使用如Apache TVM及其AutoScheduler等工具,可以自动为不同的边缘硬件搜索最优的算子实现方案,显著提升执行效率。
6.5 部署后的系统监控与持续迭代
模型上线并非终点,而是持续运营的开始。
-
性能与异常监控:需建立实时看板监控推理延迟、吞吐量、资源利用率等指标。设置异常检测机制,如监控数据分布漂移(例如使用KL散度),在指标异常时触发告警。
持续优化闭环:
-
A/B测试:通过流量分层采样,科学评估新模型版本在真实场景下的效果。
自动化评估与调优:利用工具对智能体工作流进行基准测试,并自动调整关键超参数。
数据回流与模型更新:建立管道,将生产环境中的困难样本、新案例回流,用于迭代训练,形成闭环。
6.6 主流部署框架与 Runtime 详解
在模型部署环节,ONNX 通常是通用的“中间语言”,而 TensorRT、OpenVINO 等则是针对特定硬件进行极致优化的“终极执行环境”。
1. ONNX (Open Neural Network Exchange)
-
定位:通用的模型中间表示格式。
-
作用:解决框架壁垒。无论你是用 PyTorch (Ultralytics) 还是 TensorFlow 训练的模型,都可以先导出为
.onnx格式。它定义了一个标准的计算图,使得模型可以在不同的训练框架和推理引擎之间迁移。 -
YOLO 实践:
model.export(format='onnx')生成的文件可以被几乎所有主流推理框架读取。它是通往 TensorRT 或 OpenVINO 的必经之路。
2. TensorRT (NVIDIA)
-
定位:NVIDIA GPU 专属的高性能推理 Runtime。
核心优势:
-
算子融合 (Layer Fusion):将 Conv + BN + ReLU 合并为一个算子,减少显存读写。
-
精度校准 (INT8/FP16):利用 NVIDIA 显卡的 Tensor Cores 进行低精度高速计算。
- 显存优化:为模型分配最优的显存空间。
-
适用场景:服务器端、Jetson 系列边缘设备(如 Jetson Nano/Orin)。这是目前 YOLO 在 NVIDIA 硬件上跑得最快的方案。
3. OpenVINO (Intel)
-
定位:Intel 硬件专属的推理工具套件。
核心优势:
-
针对 Intel CPU、核显(Iris Xe)、以及神经计算棒(NCS2)进行了深度优化。
- 支持通过 ONNX 导入模型,并转换为
.xml和.bin文件。 -
适用场景:工业电脑(大多使用 Intel CPU)、海康/大华等安防设备、普通笔记本。在没有独立显卡的情况下,OpenVINO 能让 YOLO 在 CPU 上跑出惊人的帧率。
4. 其他常见 Runtime
|
框架/Runtime |
厂商/平台 |
特点与适用场景 |
|---|---|---|
|
ONNX Runtime |
微软/开源 |
跨平台通用性强,支持 CPU/GPU,API 简单易用,适合快速验证。 |
|
TFLite |
|
专为 Android 移动端和嵌入式设备设计,模型体积小,功耗低。 |
|
NCNN |
腾讯 |
针对手机端(ARM 架构)优化的极轻量级推理框架,国内移动端开发首选。 |
|
DeepStream |
NVIDIA |
基于 TensorRT 构建的视频分析框架,适合多路视频流(如几十路摄像头)并发处理。 |
5. 部署链路示意图
为了理清它们的关系,可以参考这个标准流程:
[YOLO 训练完成] (best.pt)
↓
[导出为 ONNX] (通用格式,验证计算图是否正确)
↓
┌───┴───┬─────────┐
↓ ↓ ↓
[TensorRT] [OpenVINO] [TFLite/NCNN]
(NVIDIA GPU) (Intel CPU) (Mobile/Embedded)
↓ ↓ ↓
[极致 FPS] [高效 CPU] [低功耗运行]第七部分:项目管理与最佳实践
7.1 代码组织结构
text
project/
├── data/ # 数据集
│ ├── raw/ # 原始数据
│ ├── processed/ # 处理后数据
│ └── labels/ # 标签文件
├── src/ # 源代码
│ ├── data_processing/ # 数据处理模块
│ ├── models/ # 模型定义
│ ├── training/ # 训练脚本
│ └── inference/ # 推理脚本
├── experiments/ # 实验记录
│ ├── exp001/ # 实验1
│ └── exp002/ # 实验2
├── configs/ # 配置文件
├── docs/ # 文档
└── tests/ # 测试代码
7.2 实验管理
关键记录内容:
-
环境信息:Python版本、库版本、CUDA版本
-
超参数:完整训练配置
-
数据信息:数据集大小、分布、增强策略
-
实验结果:评估指标、可视化图表
-
观察发现:训练过程中的异常或洞见

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 11
11 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)