工业机器人手眼标定技术指南--从原理到实践,掌握机器人视觉系统核心标定技术
一、什么是手眼标定
手眼标定(Hand-Eye Calibration)是机器人视觉系统的核心技术,用于确定相机坐标系与机器人末端坐标系(或基座坐标系)之间的空间变换关系。
-
- 两种典型配置
|
配置类型 |
英文名称 |
相机安装位置 |
应用场景 |
|
眼在手上 |
Eye-in-Hand |
固定在机器人末端 |
移动抓取、柔性装配 |
|
眼在手外 |
Eye-to-Hand |
固定在工作空间外 |
全局定位、托盘分拣 |
1.2 核心数学模型:AX=XB
手眼标定的本质是求解齐次变换方程。下图为两种配置的空间关系示意图:
图1:手眼标定两种配置的空间关系示意图(左:Eye-in-Hand,右:Eye-to-Hand)
A · X = X · B
其中:
· A:机器人末端两次位姿间的变换(由机器人运动学给出,来自编码器数据)
· B:相机两次观测标定板得到的位姿变换(由视觉算法计算)
· X:待求的手眼变换矩阵(相机→末端 或 相机→基座)
二、经典求解算法
2.1 Tsai-Lenz 两步法(1989)
Tsai-Lenz方法是手眼标定领域最经典的算法,其核心思想是将旋转和平移解耦分步求解:
图2:Tsai-Lenz两步法算法原理
算法步骤:
·第一步:求解旋转矩阵 R
·利用罗德里格斯公式,将旋转矩阵转化为旋转向量 g = tan(θ/2)·ê,建立线性方程组求解。
·第二步:求解平移向量 t
·在已知旋转矩阵的基础上,代入原方程 (RA-I)·tX = RX·tB - tA 求解平移分量。
优点:计算速度快,闭式解,适合实时应用
局限:旋转误差会传递至平移求解,噪声敏感
2.2 主流算法对比
|
算法 |
核心思想 |
特点 |
适用场景 |
|
Tsai-Lenz |
旋转/平移解耦 |
快速、经典、误差传递 |
实时应用、快速标定 |
|
Park |
李群李代数优化 |
同时求解、精度较高 |
精度要求高的场景 |
|
Daniilidis |
对偶四元数 |
统一表示、理论优雅 |
理论研究 |
|
克罗内克积法 |
向量化求解 |
高精度、计算复杂 |
离线精密标定 |
三、数据采集与位姿规划
3.1 位姿分布策略
合理的位姿分布是保证标定精度的关键。根据IEEE文献与实测经验,推荐以下采集策略:
图3:数据采集位姿分布策略(左:俯视图,右:侧视图)
关键原则:充分激励手眼矩阵的所有自由度,避免方程退化。
推荐参数:
|
参数 |
推荐值 |
说明 |
|
位姿数量 |
15-25组 |
工业级精度推荐≥20组 |
|
方位角覆盖 |
8个方位(45°间隔) |
充分覆盖绕光轴旋转 |
|
俯仰角度 |
15°-45° |
与标定板法线夹角 |
|
距离分层 |
2-3层 |
近/中/远不同距离 |
3.2 不同配置的采集要点
Eye-in-Hand(眼在手上):
· 机器人末端带动相机运动,标定板固定在工作台上
· 确保标定板始终在视野内,避免边缘畸变影响
· 标定板占画面比例建议30%-60%
Eye-to-Hand(眼在手外):
· 相机固定,机器人夹持标定板运动
· 标定板需刚性连接在末端,避免振动
· 避免遮挡和反光,保证角点清晰
四、精度影响因素与优化
4.1 误差来源分析
图4:精度影响因素分析与优化效果对比
|
误差来源 |
影响程度 |
控制方法 |
|
机器人重复定位误差 |
高 |
预热机械臂10-20分钟,选择高精度位姿 |
|
相机内参误差 |
高 |
精确内参标定(重投影误差<0.1像素) |
|
标定板平面度 |
中 |
使用陶瓷/玻璃材质,避免打印纸 |
|
角点提取精度 |
中 |
亚像素级角点检测(OpenCV cornerSubPix) |
|
光照条件 |
低 |
均匀漫射光,避免反光和阴影 |
4.2 精度优化策略

五、精度验证方法
标定完成后,必须通过验证步骤确认精度是否达到工业要求。下图展示了两种常用验证方法:
图5:精度验证方法示意图(左:重投影误差验证,右:定点验证法)
5.1 重投影误差验证
将标定得到的手眼矩阵代入,计算标定板角点在图像上的重投影位置与实际提取位置的偏差。
验证步骤:
· 在图像中检测标定板角点
· 利用标定后的手眼矩阵X,将3D角点投影到图像平面
· 计算投影点与实际检测点的像素距离δ
工业级标准:平均重投影误差 < 0.5像素
5.2 定点验证法
这是最直接的精度验证方法,反映实际工作时的定位精度:
· 在相机视野内选取一个固定点P(如棋盘格角点)
· 通过手眼矩阵将P转换至机器人基坐标系:P_base = T·X·P_cam
· 控制机械臂末端到达P_base
· 测量末端与P的实际偏差ε
工业级标准:位置误差 < 1mm,旋转误差 < 1°
六、前沿技术趋势
6.1 基于深度学习的方法
近年来,深度学习方法在手眼标定领域展现出新的可能性,主要包括以下方向:
|
方法 |
代表工作 |
特点 |
|
无标定物方法 |
LRBO (2023) |
利用机器人底座点云,无需外部标定板 |
|
视觉基础模型 |
Kalib (2025) |
利用DINO等预训练模型,无需标定物 |
|
神经网络优化 |
CNN-based |
补偿非线性畸变,端到端学习 |
6.2 性能对比
下图为传统方法与深度学习方法的性能对比:
图6:传统方法与深度学习方法对比(左:精度对比,右:耗时对比)
|
方法 |
位置误差(mm) |
旋转误差(°) |
耗时 |
|
传统棋盘格法 |
1.5-3.0 |
0.5-1.0 |
数分钟 |
|
LRBO (点云法) |
0.93 |
0.265 |
<1秒 |
|
Kalib (视觉模型) |
~3.0 |
~0.5w |
~6秒 |
结论:传统方法精度稳定但耗时;深度学习方法速度快但需GPU支持,适合快速部署场景。对于工业级精密应用,传统方法配合合理的采集策略仍是首选。
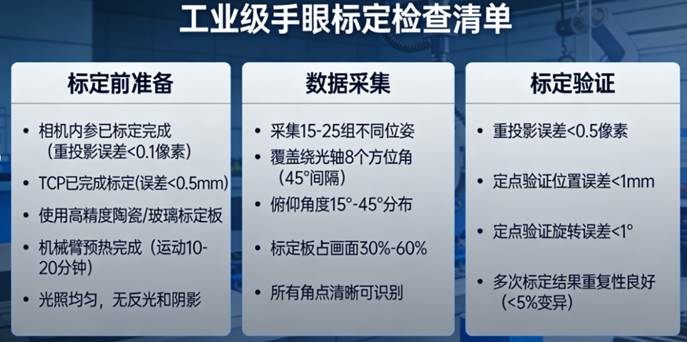
七、工业级手眼标定检查清单
八、总结
手眼标定是机器人视觉系统的"最后一公里",直接决定了抓取、装配等应用的精度上限。本文从原理、算法、采集策略、误差分析和验证方法等方面进行了系统阐述。
核心要点:
1. AX=XB 是手眼标定的数学基础,理解A、B、X的物理意义是关键
2. Tsai-Lenz是工程实践的经典选择,旋转/平移解耦策略简单有效
3. 15-25组位姿、8方位角、15°-45°俯仰是推荐的采集策略
4. TCP精度和相机内参是标定精度的前提条件,必须先行确保
5. 重投影误差和定点验证是必做的验证步骤,缺一不可
关于图准科技
图准科技专注于机器视觉标定、精度测试与工业自动化场景,提供从高精度标准件(陶瓷标准球、棋盘格/圆斑标定板)到全自动标定系统的完整解决方案。所有标准件经精密三坐标测量机检测,符合VDI/VDE、JJF等国际国内权威标准。
📞 业务咨询:17601364008(张先生)
🌐 官网:https://tuzhuntech.com

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 8
8 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)