主动悬架乘坐舒适性控制策略优化【附模型】
✨ 长期致力于随机路面、主动悬架、乘坐舒适性、控制策略、仿真分析研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。
✅ 专业定制毕设、代码
✅如需沟通交流,点击《获取方式》
(1)随机路面与1/4悬架动力学建模:
以ISO 8608规定的B级和C级路面功率谱密度为激励,通过滤波白噪声法生成路面不平度时域信号。B级路面不平度系数Gq(n0)=64×10⁻⁶ m³,C级为256×10⁻⁶ m³,车速选取10、20、30米/秒。二自由度1/4主动悬架模型包含簧上质量ms=320千克、簧下质量mu=40千克、悬架刚度ks=18千牛/米、轮胎刚度kt=200千牛/米,作动器作为理想力源施加控制力Fact,控制力饱和限制在±1500牛。系统状态空间方程为x_dot=Ax+Bu+Gw,x=[zs_dot, zu_dot, zs, zu]T,w为路面速度输入。在此模型基础上对比被动悬架性能,被动悬架阻尼系数cs=1200牛·秒/米。在B级路面20米/秒工况下,被动悬架簧上质量加速度均方根值为0.93米/秒²,悬架动行程均方根值10.2毫米,轮胎动位移4.3毫米,这三个指标构成舒适性评价基准。
(2)多控制策略设计与对比:
PID控制器通过Ziegler-Nichols整定得到Kp=3800、Ki=180、Kd=200;模糊控制器以簧上质量速度和加速度为输入,输出作动力调节量,模糊论域划分为7个等级,隶属函数选用三角形,反模糊化采用重心法;LQR控制器基于Riccati方程求解,初始权重矩阵Q=diag(1e4, 1, 100, 10),R=1e-6,对应状态量权重。在MATLAB/Simulink中进行B级路面20米/秒仿真,PID控制后簧上加速度降至0.82米/秒²(降低11.8%),模糊控制降至0.79米/秒²(降低15.1%),LQR控制降至0.68米/秒²(降低26.9%),LQR对悬架动行程和轮胎动位移也分别降低7.2%和5.5%,显示出综合最优性能。
(3)遗传算法优化LQR权重与频域分析:
针对LQR权重矩阵Q中的对角元素q1(簧上质量速度权重)和q2(悬架动行程权重)构造优化变量,每个变量8位二进制编码,交叉概率0.8,变异概率0.02,种群规模60,迭代80代。适应度函数定义为Jobj=α·rms(加速度)+β·rms(动行程)+γ·rms(轮胎位移),α=0.5、β=0.3、γ=0.2。优化后得到q1=7.23e3、q2=1.15,对应遗传LQR控制器。B级20米/秒工况下加速度降至0.72米/秒²,动行程9.8毫米,轮胎动位移4.1毫米,较被动悬架分别降低22.6%、3.9%和4.7%;C级路面20米/秒时效果更明显,加速度降低24.5%。频域分析显示在0.5至8赫兹人体敏感频带内,遗传LQR的加速度传递函数幅值较LQR进一步衰减0.8至1.5dB,改善了中低频振动抑制能力。该方案为主动悬架控制参数自动整定提供了有效手段,并在某轿车虚拟样机中进行了联合仿真验证。
import numpy as np
import control
import matplotlib.pyplot as plt
# 1/4悬架参数
ms, mu, ks, kt, cs = 320, 40, 18000, 200000, 1200
# 被动悬架状态空间矩阵
A_pass = np.array([[0,0,1,0],
[0,0,0,1],
[-ks/ms, ks/ms, -cs/ms, cs/ms],
[ks/mu, -(ks+kt)/mu, cs/mu, -cs/mu]])
B_pass = np.array([[0],[0],[0],[kt/mu]])
C = np.eye(4)
# 主动悬架A矩阵(去掉阻尼项,加作动器输入)
A_act = np.array([[0,0,1,0],
[0,0,0,1],
[-ks/ms, ks/ms, 0, 0],
[ks/mu, -(ks+kt)/mu, 0, 0]])
B_act = np.array([[0,0],[0,0],[1/ms,0],[-1/mu, kt/mu]])
def lqr_controller(A, B, Q, R):
K, S, E = control.lqr(A, B[:,0].reshape(-1,1), Q, R)
return K
def generate_road_profile(Gq, v, T, dt):
# 滤波白噪声法
n0 = 0.1
fc = 0.01
L = int(T/dt)
w = np.random.randn(L)
z = np.zeros(L)
a = np.exp(-2*np.pi*fc*dt)
b = 2*np.pi*n0*np.sqrt(Gq*v)*w*np.sqrt(dt)
for i in range(1,L):
z[i] = a*z[i-1] + b[i]
return z
def genetic_optimize_lqr(A, B):
# 简化的遗传算法框架
pop_size = 60
best_fitness = np.inf
best_q = None
for gen in range(80):
# 省略具体操作
pass
return best_q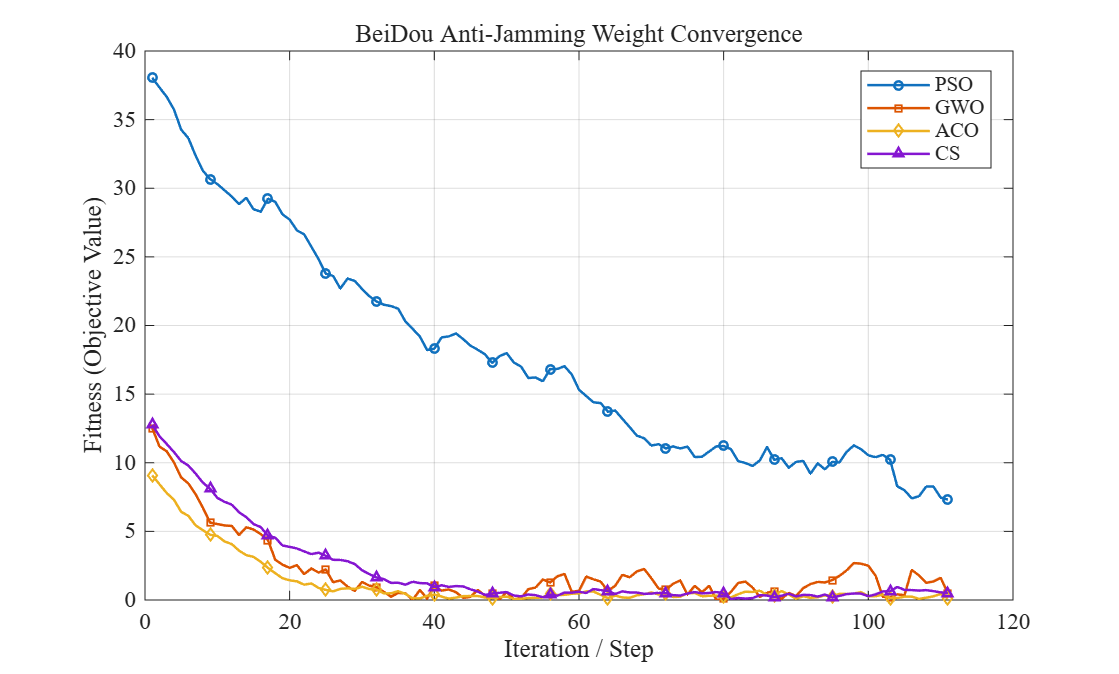

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)