RAL 2026|FlyOrb:能飞能滚、还不费电的球形机器人,极简可靠的陆空双模有解了
「可能是最易落地的陆空双模方案」
目录
陆空双模机器人长期受困于一道选择题:要地面高效,就得背上笨重的驱动机构;要飞行灵活,就得容忍地面短腿。
近期发表于 RAL 2026 的 FlyOrb 工作,用一个极简思路终结了这种两难——用被动铰链实现形态无耗切换,用共振驱动让球形机器人轻量滚动,把“鱼与熊掌”变成了可落地的工程方案,让一台球形机器人同时具备了四旋翼的飞行能力与全向滚动的高能效。
01 行业困境:陆空双模机器人的三座大山
在巡检、搜救、勘探、密闭空间作业等场景,机器人既需要低空越障、快速抵达,又需要地面长时值守、低功耗移动。传统多旋翼续航短板明显,轮式/足式地形适应差,因此陆空双模成为研究热点。但现有方案普遍面临三大硬伤:
1、机构冗余与效率折损
轮式、足式附加驱动系统重量占比高,通常达到整机 15%–30%,直接拉低续航与载荷;飞行时地面机构成为死重,地面运动时旋翼系统闲置,双向浪费。
2、模态切换复杂不可靠
多数方案依赖舵机、连杆、锁止机构完成折叠/展开,响应慢、易卡滞、维护成本高,在颠簸、粉尘环境下可靠性堪忧。
3、球形结构的天然矛盾
球形具备全向移动、抗摔、通过性好的优势,但为了起飞稳定必须做质心偏心(类似不倒翁),这又让启动滚动变得极为困难;常规惯性驱动力矩小、效率低,无法有效克服偏心带来的复位势垒。
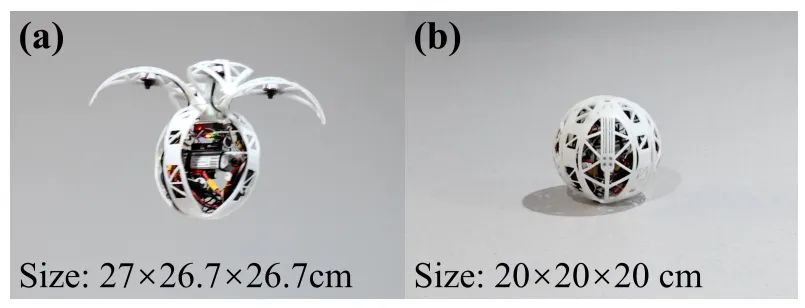
图| FlyOrb 两种形态(飞行模式 / 滚动模式)
FlyOrb 正是瞄准这三点,用极简机制系统性破局:不增加多余驱动、不依赖主动切换、用共振放大有限力矩,在结构、驱动、控制三个层面同时做减法,却实现了性能与能效的双重跃升。
02 核心创新:两套“零冗余”机制,撑起双模能力
FlyOrb 的整机设计高度凝练,所有功能围绕“飞行—滚动”无缝兼容展开,关键突破集中在机械形态与共振驱动两大板块。
1. 被动铰链+磁吸:无驱动、无耗损的形态切换
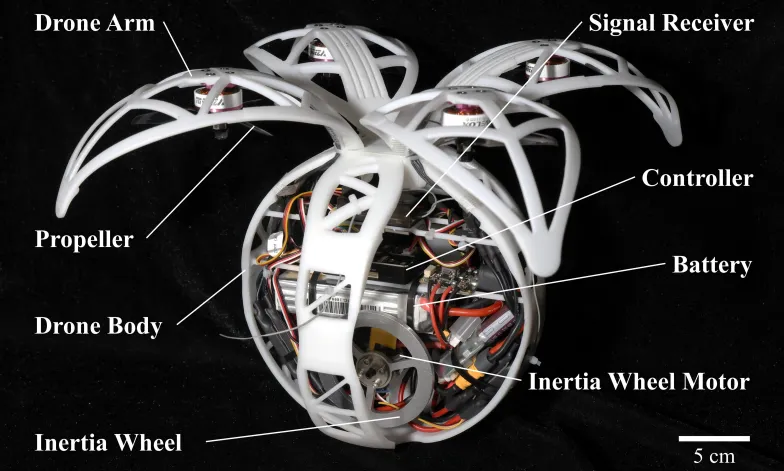
图| FlyOrb 硬件配置结构图
FlyOrb 主体为球形,机身与四旋翼机臂通过无驱动被动铰链连接,臂上集成磁铁,地面状态下吸附闭合,整机呈紧凑球体(20×20×20 cm);飞行时旋翼产生气动力矩,克服磁力被动展开,形成标准四旋翼布局(27×26.7×26.7 cm)。
这一设计的价值在于:
- 零额外驱动:切换不靠电机、不靠舵机,完全由旋翼气动力触发,结构极简、重量极轻;
- 双向自稳定:地面闭合时偏心质心实现不倒翁式自稳,便于起飞姿态对准;飞行展开后等效常规四旋翼,操控逻辑通用;
- 防护一体化:球形外壳天然保护桨叶与器件,碰撞、跌落、在狭小空间穿梭更安全。
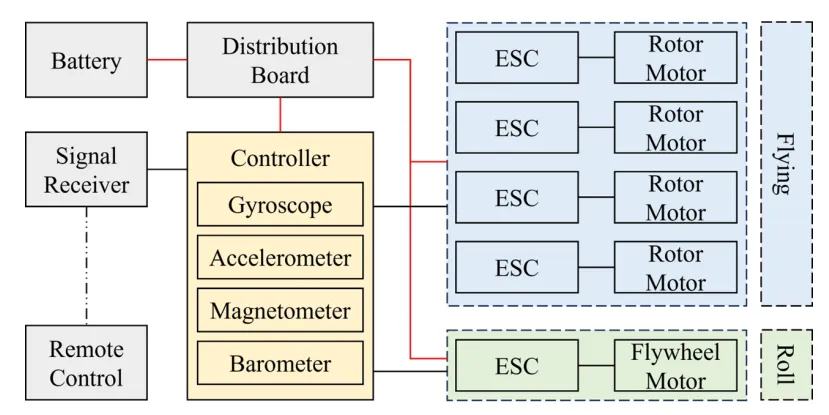
图| FlyOrb 电子系统总览
作为代价,被动铰链会小幅降低飞行机动裕度,但换来的是系统复杂度、重量、故障率的指数级下降,在工程上是高度理性的取舍。
2. 共振驱动滚动:用小力矩撬动大运动
为解决偏心球形难以启动与惯性轮力矩不足的双重问题,论文提出共振驱动滚动策略,成为整套系统的“灵魂设计”。
其原理通俗理解为:
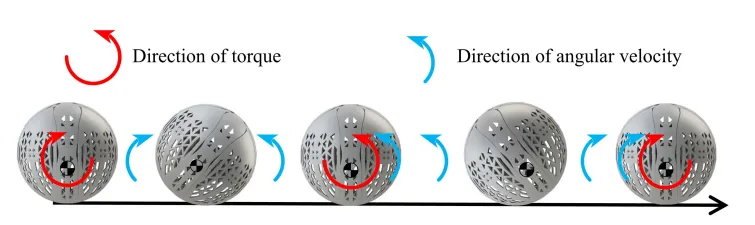
图| 共振驱动策略原理示意图
偏心球体在地面受扰后会围绕平衡点做非线性摆动;惯性轮在球体经过平衡位置、角速度最大时瞬间反向加速,施加短脉冲力矩,且力矩方向与运动方向始终一致,持续做正功;经过数轮振荡放大,动能累积足以越过 180° 势垒,球体开始持续滚动。
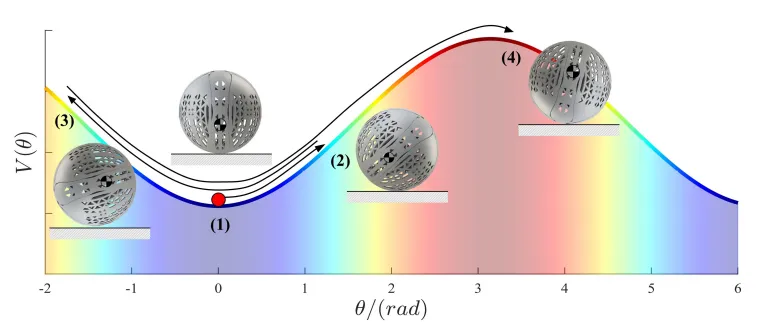
图| 滚动启动过程中的势能变化曲线
论文基于拉格朗日方程建立了惯性轮驱动球体的动力学模型,核心关系可简化理解为:
系统总动能由球体转动与惯性轮转动共同构成,势能由偏心质量位置决定;共振控制的本质,是在固有振荡周期的最优相位注入力矩,实现能量高效注入。
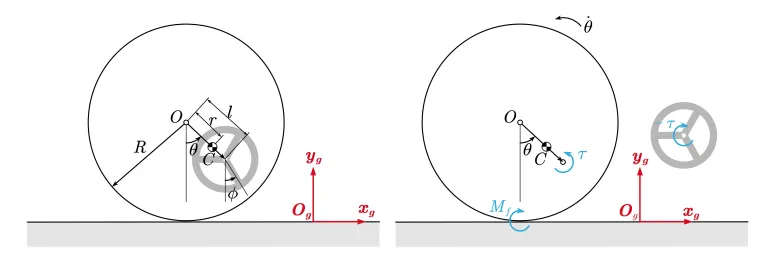
图| 滚动动力学模型示意图
这一机制的优势极其突出:
- 超轻驱动:惯性轮总成仅 136 g,占整机质量 11.6%,远低于同类方案;
- 超高能效:地面滚动平均功率 7.22 W,悬停功率 231.99 W,节电效率高达 96.8%;
- 平地稳定启动:实测平均滚动速度 0.3505 m/s,在平坦地面可稳定持续行进。
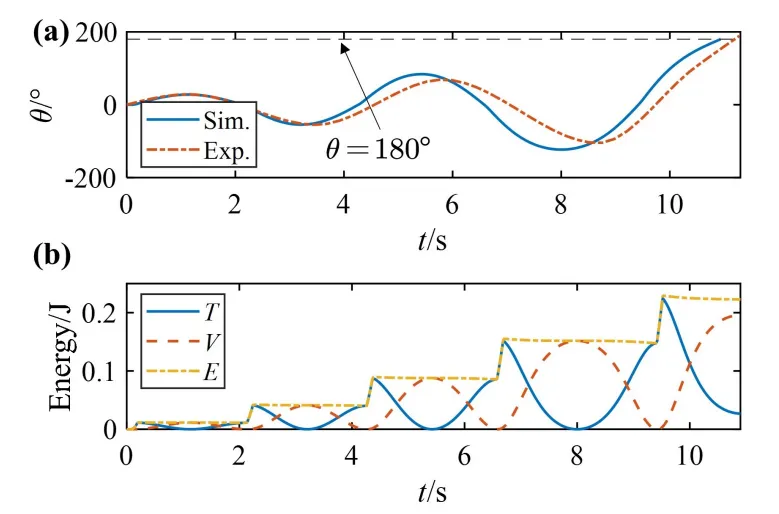
图| 滚动过程数值仿真与实验结果(角度–时间曲线 / 能量–时间曲线)
3. 气动优化:最小化臂体对推力的损失
机臂遮挡会降低旋翼气动效率,论文对比两种臂型,最终选定气动更优的 Arm 2:在相同转速下,推力可达无臂状态的 87.2%,在结构防护与飞行效率之间取得理想平衡。
同时,论文定量分析了被动铰链对飞行机动性的影响:无驱动铰链使得最小单臂推力必须大于臂自重,可用总推力与偏航力矩范围有所收缩,但仍满足稳定悬停、姿态控制与垂直起降需求。
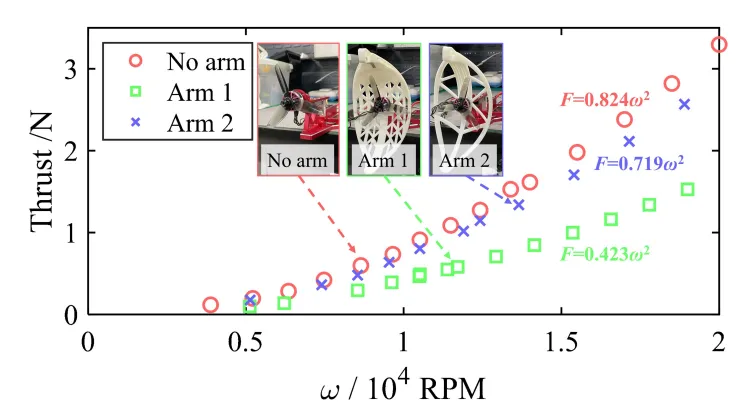
图| 不同机臂结构下旋翼推力实验结果
03 环境通过性:爬坡与越障的理论边界与实测
陆空双模的实用价值,很大程度取决于何时该滚、何时该飞。论文针对斜坡与台阶两种典型障碍,建立了判据模型,给出清晰的可行域边界。
1. 斜坡攀爬
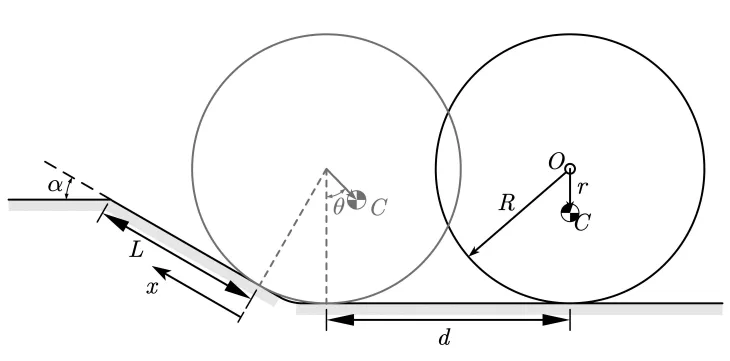
图| FlyOrb 爬坡过程参数示意图
假设无滑转、无碰撞能量损失,球体能否滚上斜坡,取决于初始动能是否足以克服最大势能抬升。论文给出核心条件:

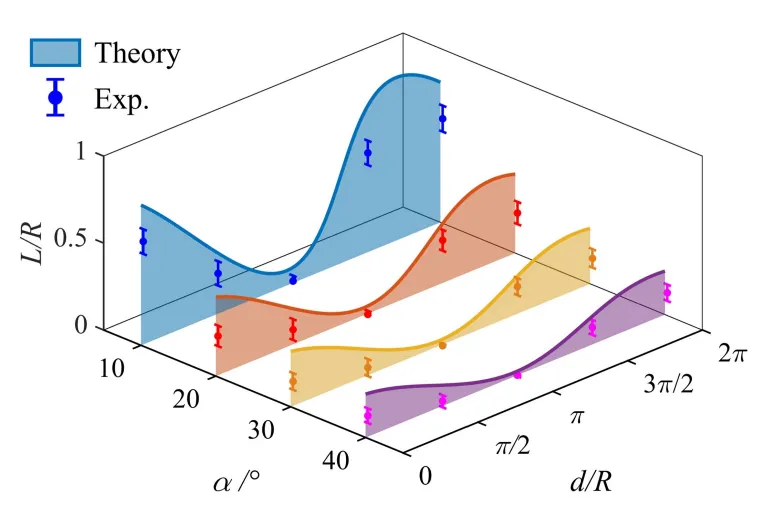
图| 不同启动距离与坡度下的最大攀爬距离(理论 + 实验)
理论与实测趋势一致,受摩擦损耗影响,实际攀爬距离略短于理论值;起始位置会影响质心初始势能,进而改变最大攀爬距离,呈现先减后增再减的非线性规律。
2. 台阶越障
台阶通过需同时满足两个条件:
1. 动能足够克服势能峰值;
2. 碰撞后支撑力,球体不脱离台阶支点。
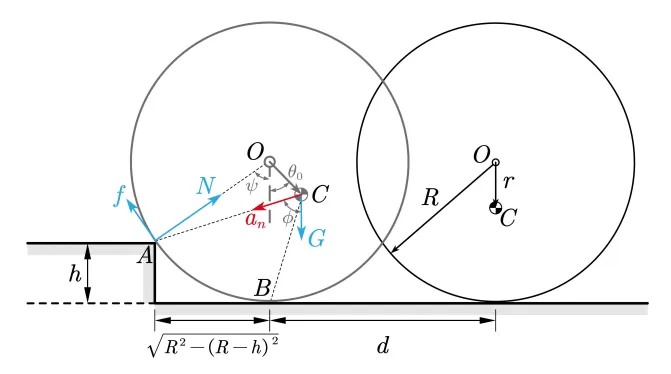
图| FlyOrb 爬台阶过程参数示意图
论文基于绕支点角动量守恒推导模型,划定成功越障的参数区间。实验表明:低台阶(0.1R)与理论吻合度高;较高台阶(0.2R)因滑动、能量损失,实际能力弱于理论,印证了模型的有效性与工程边界。
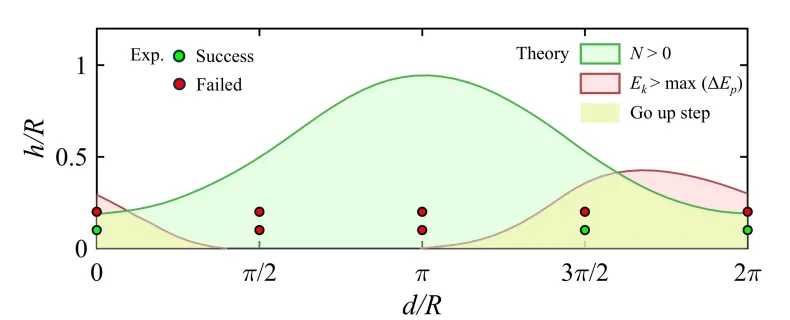
图| 不同启动距离与台阶高度下的越障可行性分析(理论 + 实验)
这套判据为自主导航提供直接依据:机器人可根据障碍尺寸实时决策“滚过去”还是“飞过去”,实现能效最优路径。
04 性能基准:FlyOrb 在同类中的真实位置
论文将 FlyOrb 与多项代表性陆空双模工作对比,核心指标如下:
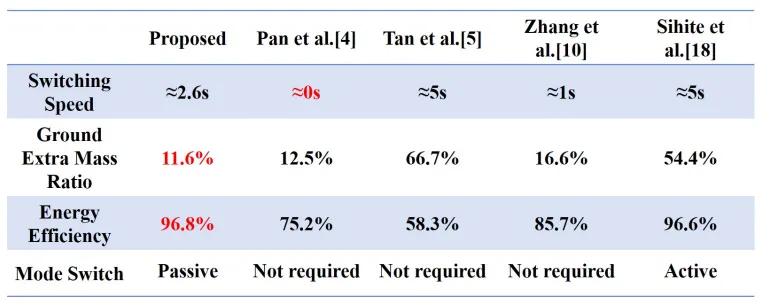
图| FlyOrb 与同类方案基准对比表
可以清晰看出:
- FlyOrb 实现了最低附加质量占比与最高能效,把“地面节能”做到极致;
- 被动切换牺牲了少量切换速度,但换来结构最简、可靠性最高;
- 共振驱动首次在偏心球形上实现稳定、高效、轻量的滚动,填补了技术空白。
它不是综合机动最强的方案,却是工程约束下最均衡、最易落地、能效最优的陆空双模形态之一。
05 中立审视:优势、局限与未解决的问题
任何工程方案都有取舍,FlyOrb 同样存在清晰的能力边界。
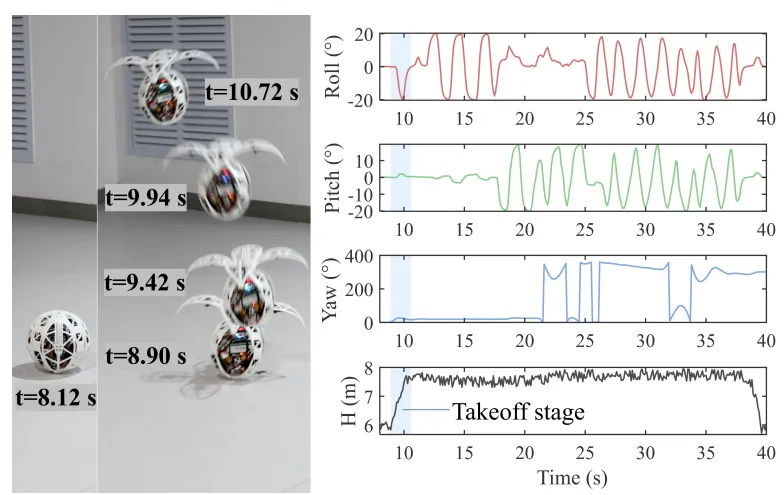
图| FlyOrb 起飞过程与姿态角 / 高度变化曲线
突出优势
1. 极简高可靠:无主动切换机构,故障点极少,适合长期无人值守;
2. 能效一骑绝尘:96.8% 节电效率,大幅延长任务时长;
3. 形态天然友好:球形抗摔、全向移动、防护性好,适合室内、管道、废墟等复杂环境;
4. 控制可扩展:飞行沿用成熟四旋翼框架,地面仅需共振闭环,开发门槛低。
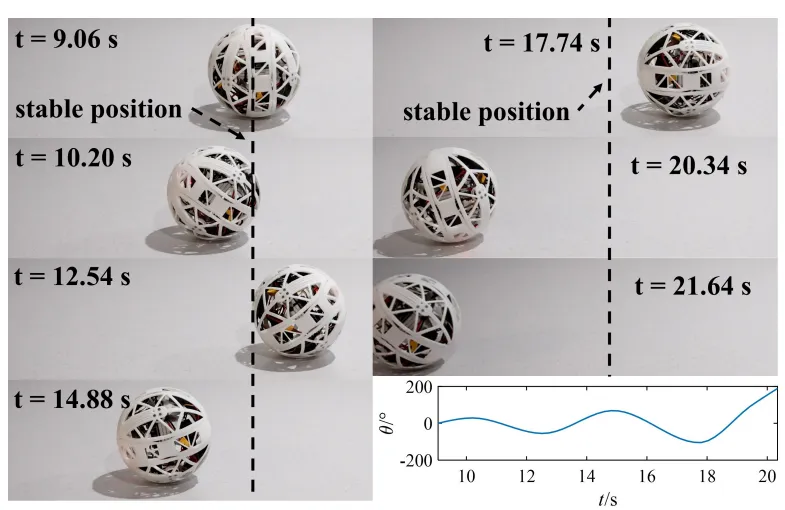
图| FlyOrb 共振驱动过程与旋转角度变化曲线
现存局限
- 地面机动性有限:当前仅实现单向滚动,未实现全向转向,路径规划受限;
- 通过能力中等:依赖惯性冲坡/冲台阶,对高障碍、软地面、湿滑路面适应差;
- 飞行机动性妥协:被动铰链与臂体遮挡导致机动裕度低于纯四旋翼;
- 负载与扩展性弱:紧凑球形内部空间有限,难以搭载大功率传感器与执行器。
06 总结
FlyOrb的核心价值,是在行业内卷中回归机械本质与动力学规律,用被动铰链、共振驱动、偏心质心三大极简设计,化解了陆空双模的结构与能效矛盾。
它证明跨域移动的关键不是功能叠加,而是机制复用、结构共生、能效最优,为搜救、勘探、密闭空间作业提供了高可靠、长续航的落地路线,更为下一代紧凑型陆空机器人树立了权威设计参照。
Ref:
论文标题:FlyOrb: Spherical Terrestrial-Aerial Bimodal Vehicle
发表期刊:IEEE Robotics and Automation Letters (RA-L), 2026
论文地址:https://astar-lab.github.io/attaches/docs/journals/RAL2026.pdf

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 2
2 0
0- 0



 已为社区贡献44条内容
已为社区贡献44条内容

所有评论(0)