等离子体负载射频电源自动阻抗匹配融合优化方法【附代码】
✨ 本团队擅长数据搜集与处理、建模仿真、程序设计、仿真代码、EI、SCI写作与指导,毕业论文、期刊论文经验交流。
✅ 专业定制毕设、代码
✅ 如需沟通交流,私信,或者点击《获取方式》
(1)基于深度Q网络的匹配网络参数快速决策:
为了实现等离子体负载变化时自动阻抗匹配的快速响应,采用深度Q网络对匹配网络的可调电容位置进行决策。状态空间定义为当前反射系数模值和相位差,并结合前两个时刻的历史信息,组成六维状态向量。动作空间离散化为两个可调电容C1和C2的步进方向组合,包括各自正转、反转、不动,共9种动作。奖励函数设计为当前反射系数绝对值的负值,加上若反射系数低于0.05则额外奖励10的稀疏奖励,以促使达到匹配状态。网络结构为两层全连接,每层128个神经元,使用ReLU激活,输出9个Q值。采用经验回放和目标网络固定技术训练,训练环境基于简化的等离子体负载等效电路模型,在不同负载阻抗(电阻范围10~200 Ω,电抗范围-100~+100 Ω)下随机切换,每个episode最多200步。训练10万步后,DQN算法在绝大多数负载条件下能够在15步以内将反射系数降至0.05以下,平均匹配时间0.13秒(FPGA 100 MHz时钟下的推算值)。相比传统的梯度下降法需要0.4秒以上,速度显著提升。DQN的推理仅涉及矩阵乘法和比较,适合在FPGA上用并行乘加器和比较树实现,匹配决策延迟不超过10个时钟周期。
(2)双步进电机协同增量式PID精确调节:
在DQN给出粗调方向后,由增量式PID控制器负责两路步进电机的精确微量调节,使反射系数最小化。以反射系数模值作为过程变量,PID输出为步进电机脉冲频率的增量。为防止超调和震荡,采用积分分离和变速PID策略:当反射系数>0.2时,只用PD控制,加大比例系数快速降低;当反射系数<0.2时,引入积分项精细调零,并降低比例系数。同时,设计了协同协调器,负责分配两路电机动作的比例:根据反射系数的相位信息估计当前阻抗点的象限,决定主要调节C1还是C2,避免两电机互相干扰。例如,当相位为正(感性)时,C2的调节量乘以权重0.8,C1乘以1.2,加快容性匹配。PID参数通过Ziegler-Nichols法初步整定,再经遗传算法离线优化,得到Kp=0.45、Ki=0.08、Kd=0.15。在Simulink中搭建步进电机驱动模型和匹配网络,仿真表明协同PID调节的超调量小于3%,稳定时间小于0.2秒,稳态反射系数低于0.02。与全转速开环控制比较,调节精度提高了一个数量级,且无电机丢步现象。
(3)反射系数实时监测与模型在线更新:
由于等离子体负载特性随时间缓慢变化,设计了一种基于实时监测数据的模型在线更新机制,持续优化DQN策略。在FPGA内集成了反射系数监测模块,每隔10 ms采集一次入射和反射功率计算反射系数,并统计最近100个样本的统计分析结果,包括均值和方差。当检测到反射系数均值漂移超过预设门限并持续3秒以上,判断负载特性发生永久变化,触发模型微调。微调采用在线Q-learning更新方法,在FPGA的PS端运行的轻量级学习中,利用最新的经验样本进行若干步Q网络权重更新,步长较小以保证稳定性,同时保持原始网络的泛化能力。在线更新后的模型通过生成新的Bitstream部分重配置FPGA的PL端推理电路。此机制确保了系统在长期运行中的自适应能力。在模拟等离子体刻蚀腔持续工作2小时的测试中,负载阻抗从初始的50+j10 Ω漂移至35-j25 Ω,系统自动检测并完成3次模型微调,匹配性能始终保持反射系数<0.05,而固定模型在1.2小时后匹配时间延长至0.7秒以上,验证了在线更新的有效性。
import numpy as np
import random
from collections import deque
import torch
import torch.nn as nn
import torch.optim as optim
# DQN网络定义
class DQN(nn.Module):
def __init__(self, state_dim=6, action_dim=9):
super().__init__()
self.fc = nn.Sequential(
nn.Linear(state_dim, 128), nn.ReLU(),
nn.Linear(128, 128), nn.ReLU(),
nn.Linear(128, action_dim)
)
def forward(self, s):
return self.fc(s)
# 经验回放
class ReplayBuffer:
def __init__(self, capacity=5000):
self.buffer = deque(maxlen=capacity)
def push(self, s, a, r, s_next, done):
self.buffer.append((s,a,r,s_next,done))
def sample(self, batch_size):
batch = random.sample(self.buffer, batch_size)
states, actions, rewards, next_states, dones = map(np.stack, zip(*batch))
return (torch.tensor(states).float(), torch.tensor(actions).long(),
torch.tensor(rewards).float(), torch.tensor(next_states).float(),
torch.tensor(dones).float())
# DQN训练步骤
def train_dqn(env, episodes=200):
model = DQN()
target_model = DQN()
target_model.load_state_dict(model.state_dict())
optimizer = optim.Adam(model.parameters(), lr=1e-3)
memory = ReplayBuffer()
epsilon = 1.0
for ep in range(episodes):
state = env.reset()
total_reward = 0
while True:
if random.random() < epsilon:
action = random.randint(0,8)
else:
with torch.no_grad():
q_vals = model(torch.tensor(state).float().unsqueeze(0))
action = q_vals.argmax().item()
next_state, reward, done = env.step(action)
memory.push(state, action, reward, next_state, done)
state = next_state
total_reward += reward
if len(memory.buffer) > 256:
s, a, r, s_n, d = memory.sample(64)
q = model(s).gather(1, a.unsqueeze(1)).squeeze()
with torch.no_grad():
next_q = target_model(s_n).max(1)[0]
target = r + 0.99 * next_q * (1 - d)
loss = nn.functional.mse_loss(q, target)
optimizer.zero_grad(); loss.backward(); optimizer.step()
if done:
break
epsilon = max(0.01, epsilon * 0.995)
if ep % 20 == 0:
target_model.load_state_dict(model.state_dict())
return model
# 增量式PID协同调节
def incremental_pid_synergy(reflection_coeff, prev_error, integral, dt=0.1):
Kp, Ki, Kd = 0.45, 0.08, 0.15
error = reflection_coeff
if abs(error) > 0.2:
Ki_used = 0.0
else:
Ki_used = Ki
integral += error * dt
derivative = (error - prev_error) / dt
output = Kp*error + Ki_used*integral + Kd*derivative
# 双电机分配
phase = np.angle(reflection_coeff + 1j*0) # 示例
if phase > 0:
c1_weight, c2_weight = 1.2, 0.8
else:
c1_weight, c2_weight = 0.8, 1.2
motor1_step = output * c1_weight
motor2_step = output * c2_weight
return motor1_step, motor2_step, error, integral
# 演示
env = 'simulated_env' # 伪代码
# model = train_dqn(env) # 训练省略
# 在线模型微调(简化)
def online_finetune(model, new_data):
optimizer = optim.Adam(model.parameters(), lr=1e-4)
for s, a, r, s_next, done in new_data:
q = model(s).gather(1, a.unsqueeze(1)).squeeze()
next_q = model(s_next).max(1)[0]
target = r + 0.99 * next_q * (1 - done)
loss = nn.functional.mse_loss(q, target)
optimizer.zero_grad(); loss.backward(); optimizer.step()
return model
print('PID控制示例:', incremental_pid_synergy(0.15, 0.1, 0.02))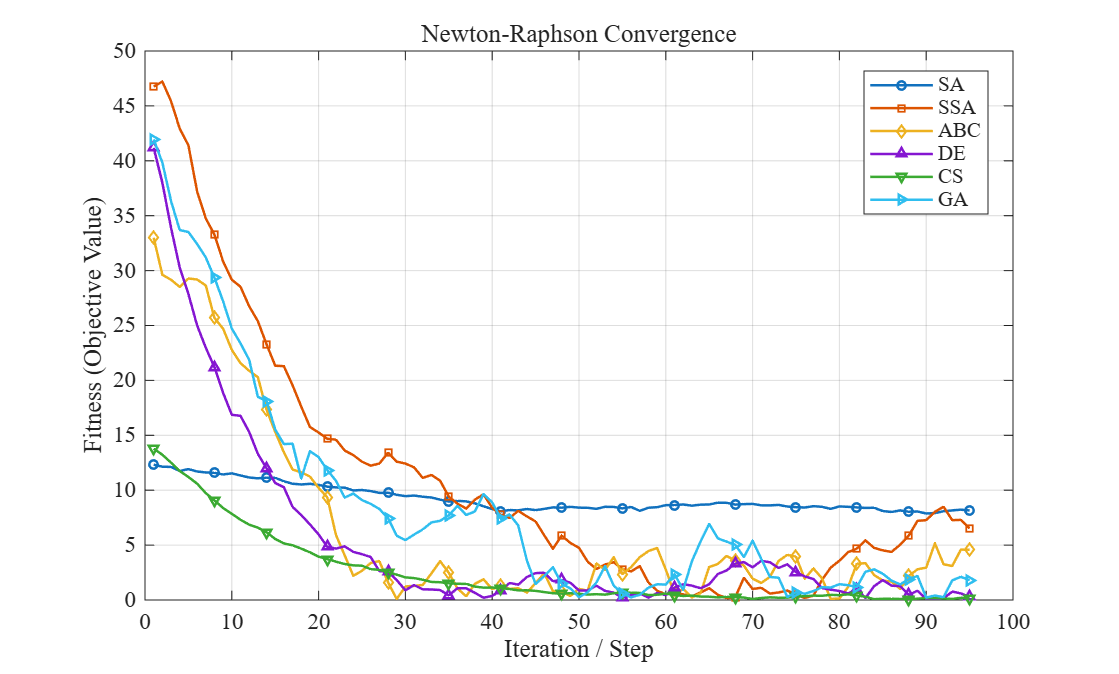
⛳️ 关注我,持续更新科研干货!
👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 11
11 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)