逃不开的小目标漏检:为什么 YOLOv11 频频丢失小目标?附 3 个实用的增强策略
逃不开的小目标漏检:为什么 YOLOv11 频频丢失小目标?附 3 个实用的增强策略
导语:在目标检测的工程落地中,我们似乎总是陷入一个逃不开的“漏检魔咒”:“大目标游刃有余,小目标却频频丢失”。即便架构进化到了最新的 YOLOv11,在面对无人机航拍、远距离行人或工业产线上的微小瑕疵时,原版模型依然容易抓瞎。面对这种情况,许多开发者的第一反应是简单粗暴地拉高输入分辨率。但今天,我们将从底层架构出发,探讨为什么单纯放大图像治标不治本,并分享 3 个真正能从特征层面上拯救 YOLOv11 小目标检测能力的底层增强策略。
01 认知误区:单纯拉高输入分辨率(imgsz)为何不可取?
在发现小目标漏检时,一个最直观的“救火”方案是修改配置文件,将输入分辨率 imgsz 从标准的 640 强行提升至 1280 甚至 1536,试图让网络“看”得更清。
然而,在实际的边缘部署中,这往往是一场灾难。
强行拉高输入分辨率,不仅会打破模型原本在高低频信息提取上的感受野平衡,更会带来计算量(FLOPs)的指数级爆炸和显存的急剧攀升。原本在边缘设备上能够流畅运行 60 FPS 的模型,可能会瞬间降级为个位数帧率。真正的工程优化,应当在不显著增加计算负担的前提下,从网络架构的特征下采样逻辑中寻找破局点。
02 架构剖析:32 倍下采样带来的“特征磨灭”
YOLOv11 频频丢失小目标,根本原因隐藏在它经典的**“32 倍下采样设计”**中。
在标准的 YOLO 架构中,图像进入 Backbone 后,会经历多次步长(Stride)为 2 的卷积或池化操作。到达提取深层语义信息的 P5 层时,特征图的物理尺寸已经被缩小了 2 5 = 32 2^5 = 32 25=32 倍。
🔍 临床剖析:假设原图中存在一个 15x15 像素的微小缺陷。经过 32 倍下采样后,这个缺陷在深层特征图上的映射面积将不足 0.5x0.5 个像素。在物理与数学层面上,微小目标的细粒度特征已经被网络彻底“磨灭”殆尽,后续的检测头自然无从预测。
03 破除魔咒:从特征保真到度量重构的 3 大增强策略
要让 YOLOv11 打破特征丢失的魔咒,盲目堆砌注意力机制(Attention)收效甚微。我们需要从特征提取、多尺度融合与损失函数三个维度,打出一套底层的增强“组合拳”:
-
策略一:引入 SPD-Conv,实现无损下采样
传统的步长卷积(Strided Conv)是造成细粒度信息丢失的主要元凶。SPD-Conv(Space-to-Depth 空间深度转换卷积)提供了一种更为优雅的降维思路:它摒弃了跨步卷积,转而将空间维度的数据“折叠”至通道维度。
这种设计的优势在于:在有效缩小特征图空间分辨率的同时,保留了原始图像中每一个像素的信息。将 YOLOv11 浅层的下采样模块替换为 SPD-Conv,小目标的边缘与纹理特征就能被完好无损地传递至深层网络。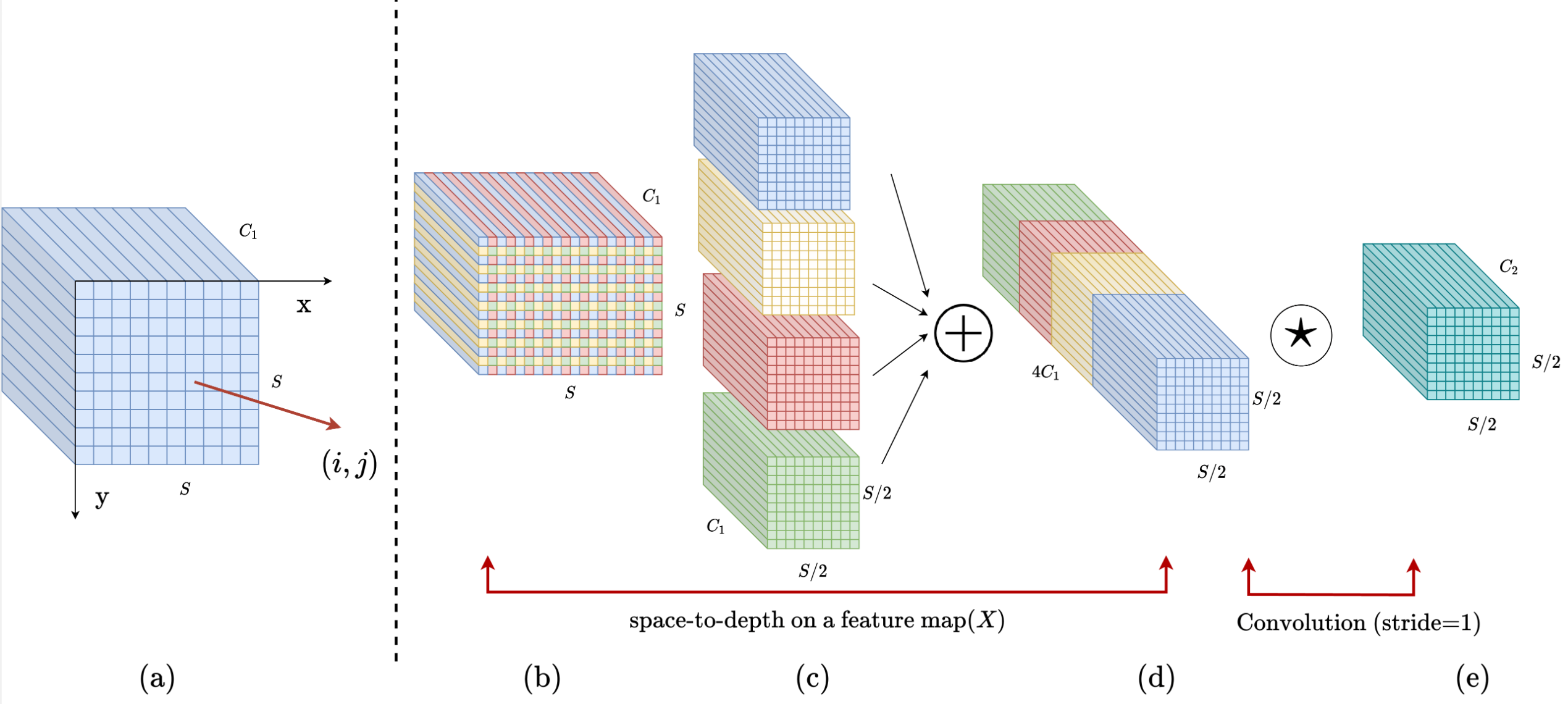
-
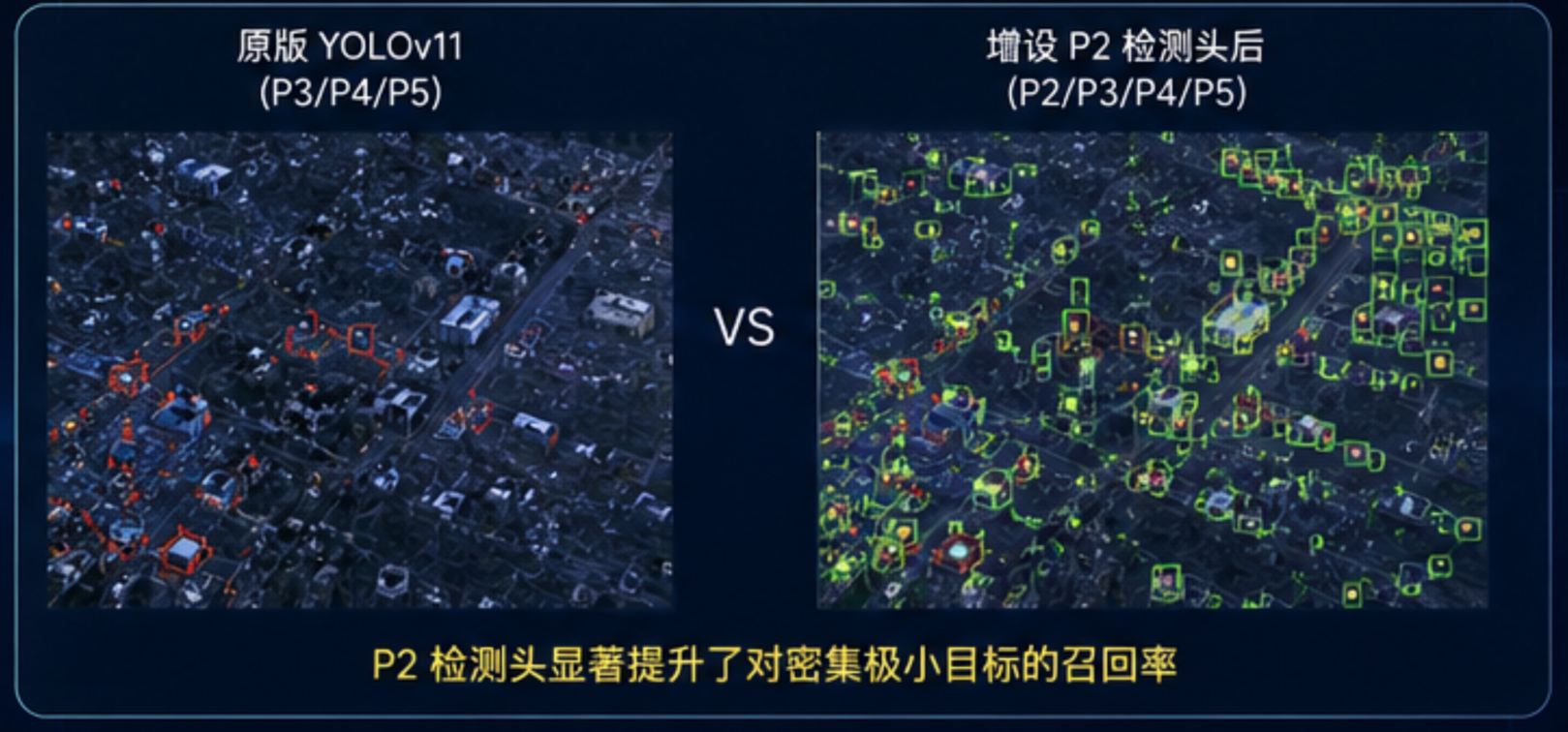
策略二:增设 P2 极小目标专属检测头
原版 YOLOv11 默认输出 P3、P4、P5 三个尺度的检测头(分别对应 8、16、32 倍下采样)。但对于极小目标而言,即便是 P3 层(8 倍下采样)的感受野有时也显得过大。
优化实践:在 Neck 网络的设计中,我们可以显式地引出 P2 层(仅下采样 4 倍)的特征图,并为其接入一个高分辨率的专属检测头。尽管这会带来少许的参数量增长,但对于密集型小目标(如航拍视角下的车辆与人群)的召回率提升具有立竿见影的效果。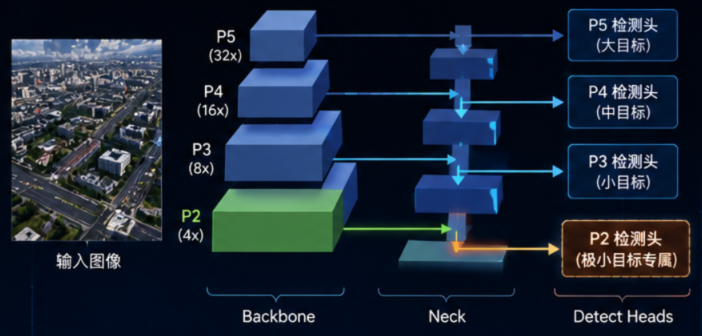
-
策略三:引入 NWD Loss(归一化 Wasserstein 距离)
传统的 IoU(交并比)在衡量小目标边界框时存在严重的敏感性问题。对于一个 6x6 像素的真实框,预测框哪怕仅偏移 1 个像素,IoU 也会出现断崖式下跌,导致模型训练极度震荡。
NWD Loss 创新性地将边界框建模为二维高斯分布,并利用分布之间的 Wasserstein 距离来衡量相似度。它对轻微的位置偏差拥有更好的宽容度,完美契合了小目标检测的优化需求。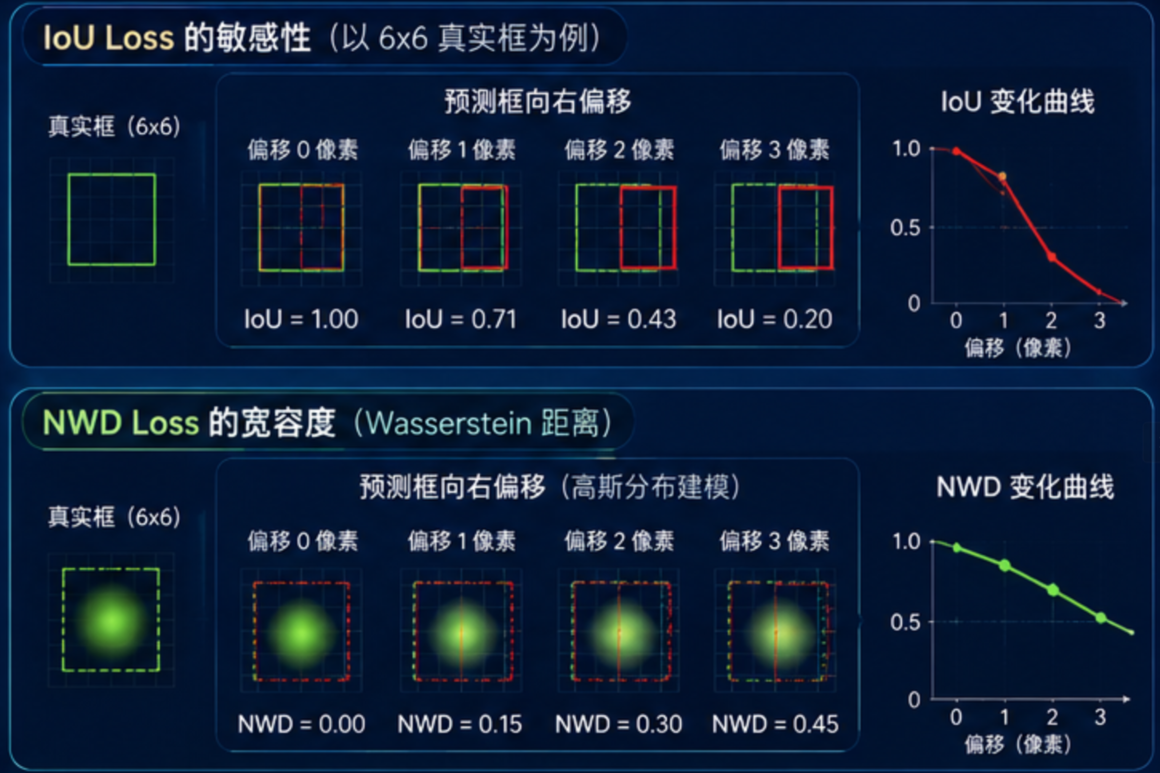
💡 总结与工程落地建议
综上所述,打破 YOLOv11 漏检魔咒的底层逻辑可以概括为:“浅层特征保真(SPD-Conv)+ 高分辨率预测(P2检测头)+ 鲁棒的分布度量(NWD Loss)”。
这套优化方案能够在控制计算复杂度的前提下,实质性地提升模型对微小特征的捕获能力,非常适合应用于工业缺陷检测、遥感图像分析等对精度要求严苛的真实场景。
- 🔗 拓展阅读与硬核资源:
- SPD-Conv 理论与源码:No More Strided Convolutions or Pooling(建议开发者重点关注其中的
space_to_depth算子实现,并尝试将其融合至 YOLOv11 的conv.py模块中进行魔改)。
- SPD-Conv 理论与源码:No More Strided Convolutions or Pooling(建议开发者重点关注其中的
💬 深度探讨:
在各位日常的业务落地中,针对小目标检测,大家是更倾向于优化网络拓扑结构(如增加检测头),还是采用前处理切图(如 SAHI 技术)的策略?欢迎在评论区分享你的工程实践经验。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 2
2 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)