[具身智能-587]:机器自动化、大语言模型、具身智能的对比
以下是机器自动化(Machine Automation)、大语言模型(LLM)与具身智能(Embodied Intelligence) 的系统性对比,从目标、能力边界、技术本质到适用场景,层层递进揭示三者在智能演进中的定位与差异:
一、核心定位对比
| 维度 | 机器自动化 | 大语言模型(LLM) | 具身智能 |
|---|---|---|---|
| 本质 | 执行确定性任务的工具 | 静态知识的压缩与生成器 | 在开放环境中自主生存与行动的智能体 |
| 目标 | 提高效率、替代重复劳动 | 理解/生成人类语言 | 在物理+社会世界中达成目标 |
| 智能层级 | 无智能(预设规则) | 认知智能(符号处理) | 物理智能(感知-认知-行动闭环) |
✅ 演进关系:
自动化 → 解放体力
LLM → 解放脑力(信息处理)
具身智能 → 解放完整行动力(在真实世界做事)
备注:具身智能之后,就是“社会”智能!!!
二、能力边界深度对比
1. 环境适应性
| 机器自动化 | LLM | 具身智能 | |
|---|---|---|---|
| 环境要求 | 封闭、结构化(如工厂) | 无需环境(纯数字空间) | 开放、动态、非结构化(家庭/街道) |
| 应对变化 | 环境一变即失效 | 可回答“如果…会怎样”,但无法验证 | 实时感知→推理→调整行为 |
| 示例 | 机械臂抓固定位置零件 | 回答“如何开瓶盖” | 面对新瓶盖,尝试多种手法直至成功 |
2. 目标达成方式
| 机器自动化 | LLM | 具身智能 | |
|---|---|---|---|
| 目标来源 | 人类硬编码 | 用户即时输入 | 内生驱动力 + 外部指令融合 |
| 任务分解 | 固定流程 | 逻辑推理(文本层面) | 物理动作规划 + 社会策略选择 |
| 失败处理 | 报错停机 | 生成新解释 |
试错、求助、工具创造、重规划 “错误”是正常的一部分!!! 是通向成功的一种尝试!!! |
3. “自我”与学习
| 机器自动化 | LLM | 具身智能 | |
|---|---|---|---|
| 是否有“我” | 无 | 无(只有“I”字,无主体性) | 有功能性自我模型(本体+社会角色) |
| 学习方式 | 无法学习 | 离线训练,部署后冻结 | 在线持续学习(边做边学) |
| 经验积累 | 无 |
无个体记忆 个体的记忆通过"智能体"来实现的!!! LLM不是个体特有的,是所有个体共享的。 大模型无法“形成我”,如果有“我”,也是宽泛的“我”。 而是不是“小我”,而是“大我”!! |
形成长期记忆与技能库 每个智能体有自己独立私有的模型 和智能体上下文!!!! 这是具身智能相对于LLM的区别!! |
三、技术架构差异
| 层级 | 机器自动化 | LLM | 具身智能 |
|---|---|---|---|
| 输入 | 传感器信号(开关、编码器) | 文本 token | 多模态流(视觉+触觉+语音+本体感知) |
| 处理核心 | PLC / 控制算法 | Transformer 神经网络 | 多模型融合: - VLM(视觉语言) - World Model(世界模型) - RL Policy(强化学习策略) - Social Reasoner(社会推理) |
| 输出 | 执行器指令(电机转动) | 文本/代码 | 物理动作 + 语言交互 + 社会行为 |
| 反馈机制 | 无(开环)或简单闭环 | 无(单向生成) | 感知-行动-评估-学习 闭环 |
🔧 具身智能 = LLM(认知) + 自动化(执行) + 感知系统 + 学习引擎 的深度融合
四、典型应用场景
| 场景 | 机器自动化 | LLM | 具身智能 |
|---|---|---|---|
| 工厂装配 | ✅ 精准高效 | ❌ 不适用 | ⚠️ 过度设计(除非柔性产线) |
| 客服问答 | ❌ 仅限菜单式 | ✅ 主流方案 | ⚠️ 若需物理服务(如送物)则必要 |
| 家庭助老 | ❌ 无法应对突发 | ❌ 仅能语音提醒 | ✅ 监测跌倒→呼叫→取药→陪伴 |
| 野外勘探 | ❌ 路径固定 | ❌ 无身体 | ✅ 自主导航→采样→避障→回传数据 |
| 办公室协作 | ❌ 仅送文件机器人 | ❌ 无行动力 | ✅ 理解“帮我准备会议室”→订房→投影调试→倒水 |
五、局限性对比
| 系统 | 核心局限 |
|---|---|
| 机器自动化 | 脆弱性:环境稍变即失效;无泛化能力 |
| 大语言模型 | 幻觉:生成看似合理但错误的信息;无 grounding:脱离物理现实;无行动力 |
| 具身智能 | 复杂度爆炸:感知-决策-控制全链路需极高可靠性;样本效率低:真实世界试错成本高;社会智能缺失:难理解隐性规则 |
六、未来融合趋势
三者并非取代关系,而是分层协同:
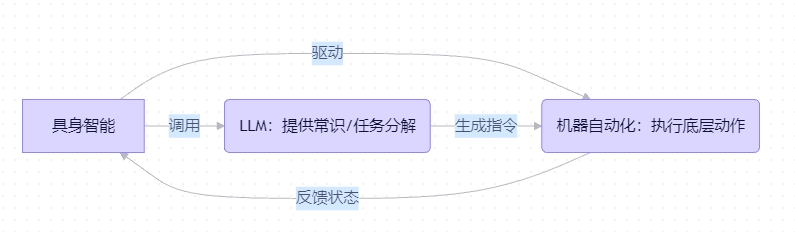
- LLM 作为“大脑”:提供高层规划与语义理解
- 自动化作为“肌肉”:执行精确、高速的底层控制
- 具身智能作为“完整生命体”:整合二者,在真实世界生存
🌰 例如:
具身机器人听到“泡杯咖啡” →
LLM 分解步骤 →
自动化模块控制机械臂精准抓杯、注水 →
视觉系统实时校正 →
社会模块判断“用户在开会,轻放桌上不打扰”
七、总结:智能的三重境界
| 境界 | 代表 | 能力 | 隐喻 |
|---|---|---|---|
| 第一重:手 | 机器自动化 | “做得快” | 工匠的手 |
| 第二重:脑 | 大语言模型 | “说得对” | 学者的嘴 |
| 第三重:身+心 | 具身智能 | “活得明白,做得成事” | 完整的人 |
✅ 真正的通用智能,不在云端,而在泥土之中——它必须能弯腰、流汗、跌倒、再站起来,同时懂得为何而做。
这正是具身智能被视为 通往 AGI(通用人工智能)唯一可行路径 的根本原因。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 5
5 0
0- 0



 已为社区贡献88条内容
已为社区贡献88条内容

所有评论(0)