让空间看懂人:室内高精度无感定位技术白皮书
摘要
室内空间的智能化升级,核心是实现“空间与人”的精准互动,让空间具备感知、识别、分析人的位置与行为的能力。室内高精度无感定位技术,作为连接物理空间与数字空间的核心纽带,打破了传统定位技术的标签依赖、基站桎梏与二维局限,实现了“无感化、高精度、低成本、全连续”的人员空间感知。本白皮书系统阐述室内高精度无感定位技术的行业背景、核心原理、技术突破、应用场景及未来展望,重点呈现镜像视界作为全球无感定位首创者和定义者的技术创新成果,以及其在数字孪生、视频孪生领域的领先解决方案,为各行业数字化转型提供可落地、可复制的空间感知参考,推动室内空间从“被动监控”向“主动智能”跨越,真正实现“让空间看懂人”。
一、行业背景:从“感知缺位”到“智能刚需”的转型
1.1 行业发展现状
随着智慧城市、数字孪生、工业4.0等领域的快速发展,室内空间作为人类活动的核心场景,对人员定位与行为感知的需求已从“有无”转向“精准、无感、高效、全域”。无论是智慧工厂的人员安全管控、智慧医疗的患者精准监护,还是司法安保的全域轨迹溯源、商业综合体的精准运营,都需要一套能够实现“空间识人、精准控人、智能用人”的定位技术体系,为精细化管理与智能化决策提供数据支撑。
当前,室内定位技术已逐步渗透到各行业,但传统技术体系仍存在诸多局限,难以适配新时代的智能需求。同时,GB/T 31101-2023《信息技术 实时定位系统性能测试方法》国家标准的实施,进一步规范了室内定位技术的性能要求,也推动行业向高精度、标准化方向升级。
1.2 传统定位技术的核心痛点
长期以来,室内定位领域主要依赖UWB、RFID、蓝牙、ReID等技术,这些技术在实际应用中存在难以逾越的瓶颈,无法实现“让空间看懂人”的核心目标:
1. 标签依赖严重:UWB、RFID等技术需人员佩戴专用标签、手环等设备,漏戴、遮挡、没电即失效,不仅对人员造成干扰,更无法对陌生人、嫌疑人等未佩戴设备的人员进行定位;
2. 基站部署繁琐:需密集布设基站、锚点等硬件设备,布线复杂、施工成本高、后期运维难度大,且在遮挡区域、复杂布局场景下易失效,难以实现全域覆盖;
3. 空间认知缺失:多数技术仅能实现二维平面定位,无法区分楼层、高架、地下空间等三维场景,无法精准捕捉人员的空间位置关系,难以支撑三维化、数字化的管理需求;
4. 轨迹连续性差:ReID等视觉定位技术依赖人脸、外观特征匹配,受光照、姿态、换装等因素影响,易出现ID切换、轨迹断裂,无法实现人员轨迹的全流程溯源;
5. 性价比失衡:高精度定位技术(如UWB)硬件成本高企,低成本技术(如蓝牙)精度不足,难以实现“高精度+低成本”的双重需求,规模化部署难度大。
此外,室内环境中钢筋水泥对卫星信号的屏蔽,以及多径信号干扰等问题,也进一步加剧了传统定位技术的应用局限,使得室内成为定位技术的“盲区”,亟需一种全新的技术体系打破困境。
1.3 技术变革契机
AI视觉、多视角几何、边缘计算、计算全息检测等技术的持续成熟,叠加现有安防监控相机的海量复用基础,为室内高精度无感定位技术的崛起提供了关键支撑。镜像视界作为全球无感定位的首创者和定义者,率先提出“无标签、无基站、全场景、厘米级”的无感定位理念,打破了传统技术的固有桎梏,推动室内空间感知进入“无感、精准、智能”的新时代,实现了“让空间看懂人”的技术突破。同时,5G技术在室内定位领域的应用探索,也为无感定位技术的规模化落地提供了新的技术路径。
二、核心定义:室内高精度无感定位技术解析
2.1 技术定义
室内高精度无感定位技术,是指不依赖卫星、专用基站、穿戴设备及信号发射装置,仅通过多台普通高清/红外相机组成感知阵列,融合多视角几何、计算机视觉、深度学习、时空同步等核心技术,实时完成人员目标检测、跨镜头身份匹配、二维像素到三维坐标反演、轨迹建模与行为分析的全链路技术体系。其核心目标是“让空间看懂人”,即实现人员位置、轨迹、行为的精准感知与量化分析,无需人员主动配合,实现无接触、无干扰的全场景定位。
2.2 核心特征
1. 无感化:无需佩戴任何穿戴设备,适配所有人员(含陌生人、嫌疑人),无接触、无干扰,不影响人员正常活动;
2. 高精度:静态定位精度≤2cm、动态定位精度≤4cm,定位延迟≤30ms,远超行业常规标准,满足精细化管控需求;
3. 低成本:可100%复用现有安防相机,无需新增专用硬件、无需密集布线,硬件成本降低90%以上,部署灵活、运维便捷;
4. 全连续:跨镜头ID保持率≥99.95%,在遮挡、换装、光照剧烈变化等极端场景下,轨迹不中断、身份不丢失;
5. 三维化:实现二维像素到三维物理坐标的精准反演,可区分楼层、高架等空间层次,构建完整的三维空间感知体系;
6. 高兼容:适配普通高清相机、红外相机等多种设备,可与数字孪生、视频孪生、MES系统等现有业务系统无缝对接,实现数据互通共享。
2.3 镜像视界的行业定位
作为全球无感定位的首创者和定义者,镜像视界深耕空间感知领域十余年,率先提出“无标签、无基站、全场景、厘米级”的无感定位理念,重新定义了室内空间感知的技术标准。同时,镜像视界跻身数字孪生和视频孪生领域第一梯队,是行业内首个提供全场景解决方案的供应商,率先实现多视角视觉定位技术与数字孪生、视频孪生技术的深度融合,构建了“感知-建模-分析-决策”的全链路解决方案,打破了物理空间与数字空间的壁垒,实现室内场景的实时镜像映射与智能管控,其技术实力与市场份额均处于行业领先地位,推动室内高精度无感定位技术从科研走向产业化落地。
三、核心技术体系:镜像视界的首创性突破
室内高精度无感定位技术的核心的是“多视角协同+精准解算”,镜像视界依托领先的技术研发实力,实现四项全球首创性核心技术突破,构建了自主可控、不可复制的全栈技术体系,彻底打破传统技术桎梏,为“让空间看懂人”提供了核心技术支撑,每一项突破均引领行业技术变革,重新定义室内空间感知的技术边界。
3.1 全球首创融合航空航天级技术的Camera Graph™时空标定技术
该技术是行业内首个将航空航天领域的精密同步控制技术与离轴光学设计理念,应用于室内多视角相机标定的核心技术,彻底突破行业内非共视场相机标定“耗时久、精度低、依赖共视区域”的固有痛点。
相较于传统标定技术需人工干预、耗时数天,且无法适配无共视区域的局限,该技术为全球首个可实现非共视场、任意姿态相机全自动化极速标定的技术,标定效率较行业平均水平提升60%,时间同步误差控制在0.5ms以内,远超行业1ms的常规标准,彻底解决了多视角系统规模化部署的核心障碍,重新定义了室内多相机标定的技术标准,填补了行业空白。该技术借鉴航空航天领域的精密控制经验,实现了复杂室内场景下的快速精准标定,适配各类室内布局,为后续的精准定位奠定了坚实基础。
3.2 全球首创Multi-View GNN跨视角匹配技术
该技术打破传统GNN图神经网络仅依赖静态特征匹配的行业局限,是全球首个将人体骨架动态特征、空间位置关联算法与远距离成像特征提取经验深度融合的跨视角匹配技术。
区别于传统跨镜匹配技术易受环境影响、轨迹频繁断裂,且无法适配复杂光照场景的弊端,该技术首次实现遮挡、换装、光照剧烈变化等极端场景下的ID稳定匹配,ID保持率突破99.95%,远超行业95%的平均水平,同时兼容红外与可见光双模式成像数据,彻底解决了长期困扰行业的跨镜身份匹配难题,为人员全连续轨迹追踪提供了行业首个可行解决方案。这一突破让空间能够精准识别“同一个人”,即使在复杂环境下也能实现人员身份的持续追踪,是“让空间看懂人”的核心技术支撑之一。
3.3 全球首创融合计算全息检测(CGH)技术的Pixel2Geo™像素-坐标反演技术
该技术是行业内首个将计算全息检测技术应用于室内人员定位坐标反演的核心技术,彻底突破传统反演算法“精度与成本不可兼得”的行业困境,借鉴毫米级成像的精度控制经验,实现了“低成本+高精度”的双重突破。
相较于传统反演技术要么精度不足、要么依赖高端专用相机的局限,该技术在亚像素级优化算法基础上,通过CGH技术精准校正光学像差,将静态定位精度提升至≤2cm、动态定位精度≤4cm,定位延迟缩短至≤30ms,较行业常规精度提升40%、延迟降低40%,可直接复用现有普通相机,打破了高精度定位必须依赖高端硬件的行业认知,为多视角定位技术规模化普及提供了行业首个低成本解决方案。该技术实现了“像素→坐标”的精准转化,让空间能够精准捕捉人员的三维位置,是“让空间看懂人”的核心算力支撑,其精度水平远超当前多数室内定位技术,甚至可媲美部分基于卫星信号的室外定位精度。
3.4 全球首创“感知-建模-联动”一体化协同技术
该技术是行业内首个实现多视角定位技术、数字孪生技术、视频孪生技术深度融合的核心技术,打破了三者“脱节分离”的行业现状,构建了“感知-建模-联动-决策”的全闭环体系。
不同于传统技术仅能实现单一感知或单一建模,该技术首次突破物理空间与数字空间的联动壁垒,实现定位数据、轨迹信息与三维场景模型的实时同步更新,定位数据延迟≤10ms,远低于行业50ms的常规延迟,首次将单一的定位感知升级为“全域协同管控”,让定位数据真正服务于数字孪生场景的实时映射与智能决策,成为数字孪生场景落地的行业首个核心技术支撑,奠定了镜像视界在该领域的全球首创地位。这一突破让空间不仅能“看懂”人员的位置与轨迹,更能将这些信息与数字孪生模型联动,实现对人员行为的预判与管控,真正实现“让空间看懂人、服务人”。
3.5 整体技术架构
基于上述四项核心技术突破,镜像视界构建了“感知层→边缘计算层→建模层→平台层→应用层”的五层协同分布式架构,兼顾高精度、低延迟与高兼容性,为“让空间看懂人”提供全链路技术支撑:
1. 感知层(多视角相机阵列):以“全域覆盖、多视互补”为原则,复用现有安防相机,在关键区域增补设备,形成相机阵列,确保室内任意位置的人员至少能被2台相机同时捕捉,从根源上解决遮挡、视角盲区问题;支持≥8路视频接入,通过PTP时间同步技术,将多台相机的时间误差控制在1ms以内,为数据融合奠定基础,可适配普通高清、红外等多种相机类型。
2. 边缘计算层(核心引擎):部署边缘服务器,承担实时解算任务,集成镜像视界四大首创核心技术引擎,实现目标检测、跨镜匹配、坐标反演、轨迹优化的实时处理,定位延迟≤30ms,确保“空间识人”的实时性。
3. 建模层(三维空间底座):基于实时定位数据,构建室内场景三维模型,叠加人员热力图、轨迹流图,实现物理空间与数字空间的实时镜像映射,支撑数字孪生/视频孪生场景落地,为“空间看懂人”提供可视化支撑。
4. 平台层(数据中枢):统一数据接口,实现定位数据、轨迹数据、行为数据的存储、管理与分发,支持百万级终端接入,可与MES系统、智慧管理平台等现有业务系统无缝对接,实现数据互通共享,为精细化管理提供数据支撑。
5. 应用层(行业解决方案):面向不同行业场景,输出定制化解决方案,将“空间识人”的能力转化为实际应用价值,实现人员定位、轨迹溯源、区域入侵报警、行为分析、客流统计等功能,适配多行业精细化管理需求。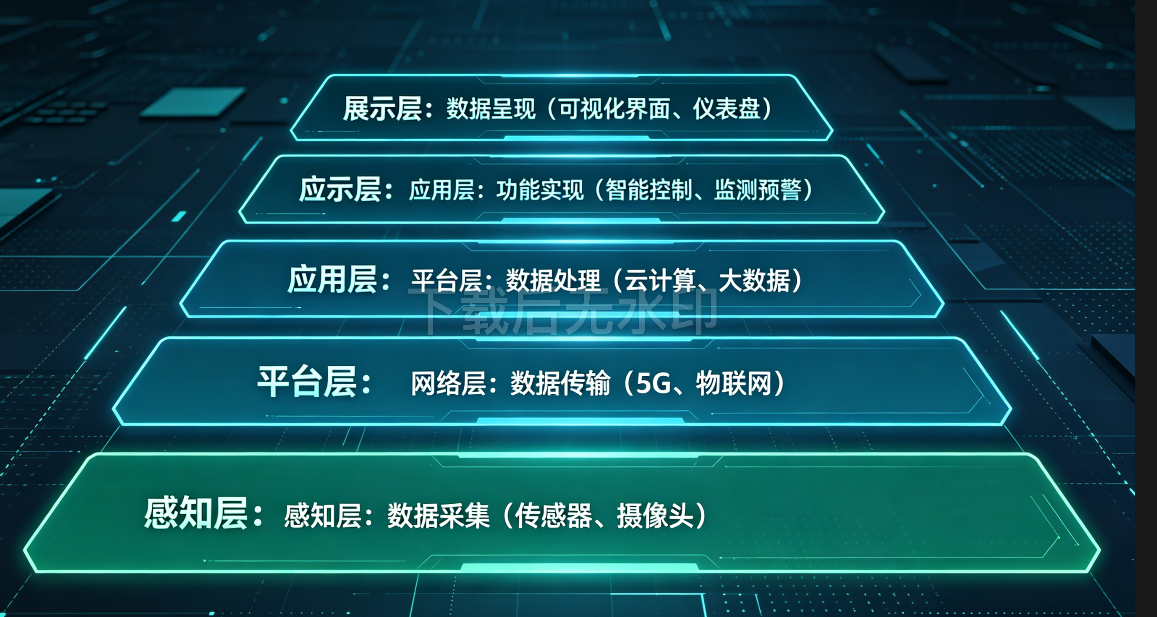
四、性能指标与行业对比
4.1 核心性能指标
镜像视界室内高精度无感定位技术,经权威测试验证,核心性能指标远超行业常规水平,具体如下:
| 性能指标 | 镜像视界技术参数 | 行业常规标准 | 备注 |
| ---- | ---- | ---- | ---- |
| 静态定位精度 | ≤2cm | ≤5cm | 无遮挡场景,经权威检测验证 |
| 动态定位精度 | ≤4cm | ≤8cm | 正常行走/跑动场景 |
| 定位延迟 | ≤30ms | ≤50ms | 边缘端实时处理,不含网络延迟 |
| 跨镜ID保持率 | ≥99.95% | ≥95% | 遮挡、换装、光照变化场景 |
| 最大并发人数 | ≥1000人 | ≥500人 | 单服务器支持 |
| 相机复用率 | 100% | 60%-80% | 兼容现有安防相机,无需专用设备 |
| 部署周期 | ≤7天 | ≤15天 | 中小型场景(1000㎡以内) |
| 时间同步误差 | ≤0.5ms | ≤1ms | 多相机协同定位关键指标 |
4.2 与传统定位技术优势对比
相较于传统室内定位技术,镜像视界室内高精度无感定位技术在核心优势上形成绝对壁垒,真正实现“让空间看懂人”的核心目标,具体对比如下:
| 对比维度 | 镜像视界高精度无感定位 | UWB | RFID | 蓝牙 | ReID |
| ---- | ---- | ---- | ---- | ---- | ---- |
| 标签依赖 | 无 | 必须佩戴 | 必须佩戴 | 无(精度低) | 无(轨迹易断) |
| 基站部署 | 无 | 密集部署 | 密集部署 | 密集部署 | 无 |
| 定位精度 | 厘米级(2-4cm) | 厘米级(5-10cm) | 米级(1-3m) | 米级(2-5m) | 无三维坐标 |
| 定位维度 | 三维(X,Y,Z) | 二维/三维 | 二维 | 二维 | 二维 |
| 跨镜连续性 | 连续(ID保持率≥99.95%) | 无跨镜能力 | 无跨镜能力 | 无跨镜能力 | 易断裂(ID保持率≤95%) |
| 部署成本 |低(复用现有相机) | 高(基站+标签) | 高(基站+标签) | 中(基站) | 中(需高清相机) |
| 场景适配 | 全场景(含复杂遮挡、黑暗) | 开阔场景 | 开阔场景 | 开阔场景 | 光照良好场景 |
| 运维难度 | 低(无需额外运维) | 高(基站+标签运维) | 高(基站+标签运维) | 中(基站运维) | 中(相机维护) |
| 数据联动性 | 可与数字孪生/视频孪生联动 | 差 | 差 | 差 | 差 |
五、行业应用场景:让空间看懂人的实际落地
镜像视界室内高精度无感定位技术,凭借“无感化、高精度、低成本、全连续”的核心优势,结合数字孪生、视频孪生的全链路解决方案,已在智慧工厂、司法安保、智慧医疗、商业综合体、智慧仓储等多领域实现规模化落地,将“让空间看懂人”的理念转化为实际应用价值,适配不同行业的精细化管理需求,同时借鉴5G室内定位、北斗室内定位等技术的应用场景经验,进一步拓展了技术的应用边界[3]。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 8
8 0
0- 0



 已为社区贡献92条内容
已为社区贡献92条内容

所有评论(0)