别再死磕代码了!把物理现象喂给AI,我的单片机Debug效率翻了十倍
文章目录
-
- 引言:传统硬件排错的“坐牢”体验 vs 我的新外挂
- 实战案例 1:当“魔法报错”遇上协议解析
- 实战案例 2:用 ”在线调参“ 治愈硬件公差
- 总结与方法论沉淀:如何成为优秀的 ”现象描述师“
引言:传统硬件排错的“坐牢”体验 vs 我的新外挂
搞过单片机和底层硬件联调的兄弟们,肯定都经历过这种绝望时刻:代码在 Keil 里跑得极其顺畅,屏幕上赫然写着赏心悦目的 0 Error(s), 0 Warning(s)。你满心欢喜地插上电源,期待见证机械运转的奇迹——结果,电机要么装死一动不动,要么像触了电一样在水里疯狂抽搐。
接下来,就是漫长且痛苦的“坐牢”时光。
传统的嵌入式排错套路是什么?如果你是硬核老炮,可能会去啃那本几百页全英文的 Datasheet,在浩如烟海的寄存器配置里寻找一个被遗忘的标志位;如果你手头宽裕,可能会掏出示波器和逻辑分析仪,死死盯着屏幕上跳动的波形,肉眼数着毫秒来对齐通信协议。
但现实情况是,对于很多在宿舍里刚起步的开发者,或者手边正好没有这些昂贵仪器的创客来说,一旦遭遇这种软硬件交织的“幽灵 Bug”,卡上三天三夜、改到头秃是家常便饭。
最近,我就在这样一个项目里实打实地挨了一顿社会的毒打。我正在开发一个双发无人船项目(底层动力基于 STM32F407 控制无刷电调,上层准备接入 Jetson Orin Nano 跑视觉算法)。本以为写几个 PWM 输出、解析一下遥控器的 i-BUS 协议只是洒洒水的小事,没想到一上真机,通信错位、猛推油门单片机猝死、摇杆归零电机却依然“偷转”……各种离奇现象接踵而至。
最要命的是,我手边根本没有示波器。
就在我准备用最原始的 printf 大法在代码里碰运气时,我突然意识到:我为什么要用纯软件的思维,去死磕物理世界的 Bug?
于是,我尝试接入了一个“新外挂”——我停止了逐行检查代码的机械劳动,而是把大语言模型(AI)彻底拉下水,跟它结对编程。
我转变了身份,不再是一个焦头烂额的程序员,而是变成了 AI 的“肉身传感器”。我不再问它“我的定时器代码对不对”,而是极其细致地把物理现象喂给它:“我的摇杆没动,但终端数据在乱跳,电机在抽搐”;“我把两根信号线互换,发现原来不转的电机转了”。
结果令人极度震撼。
以往可能要卡好几天、甚至让人放弃项目的底层疑难杂症,在“精准描述物理表象 + AI 跨界逻辑推演”的组合拳下,像切豆腐一样被层层剖开。
今天,我就把这段没有示波器、全靠“聊天描述现象”通关底层硬件天坑的硬核记录分享出来。如果你也曾被代码与硬件的鸿沟折磨到崩溃,希望这套“将现象喂给 AI”的全新降维排障方法论,能成为你今后开发时的最强外挂。
实战案例 1:当“魔法报错”遇上协议解析
为了保证这艘双发无人船的可靠性,我给它设计了一套非常标准的工业级架构:底层是 STM32F407 配合 FreeRTOS,上层分为感知层、控制层、决策层和通信层。我还专门写了一个包含 4 个状态的状态机(0:自动巡航,1:视觉垃圾拾取,2:自动回航,3:紧急手动接管)。

我把这套引以为傲的代码架构喂给了 AI,它也夸我“模块化程度很高”。看着这清晰的代码结构,我以为接下来的遥控器数据解析只是走个过场。我把富斯 FS-iA6B 接收机的 i-BUS 信号线自信地插到了单片机的 PA1 引脚上,打开 Keil 进入调试模式。
然而,现实直接给了我一记响亮的耳光。
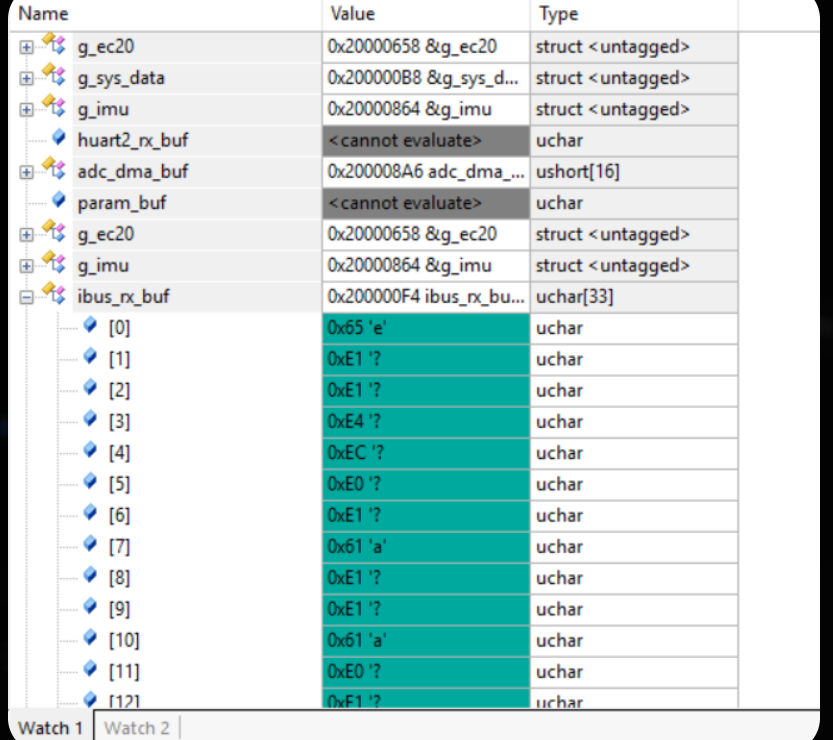
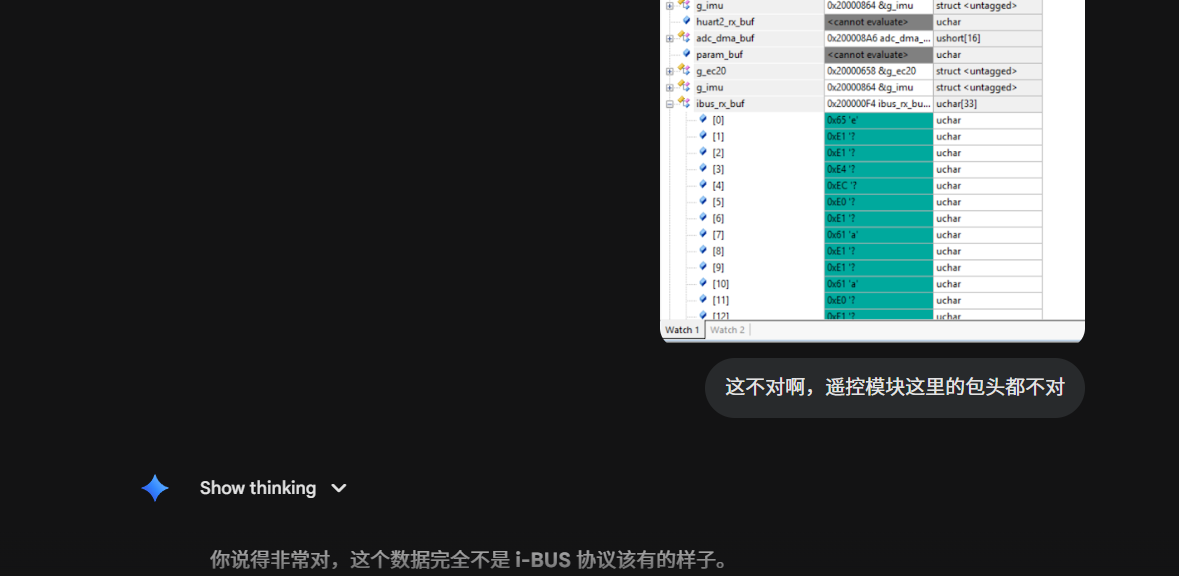
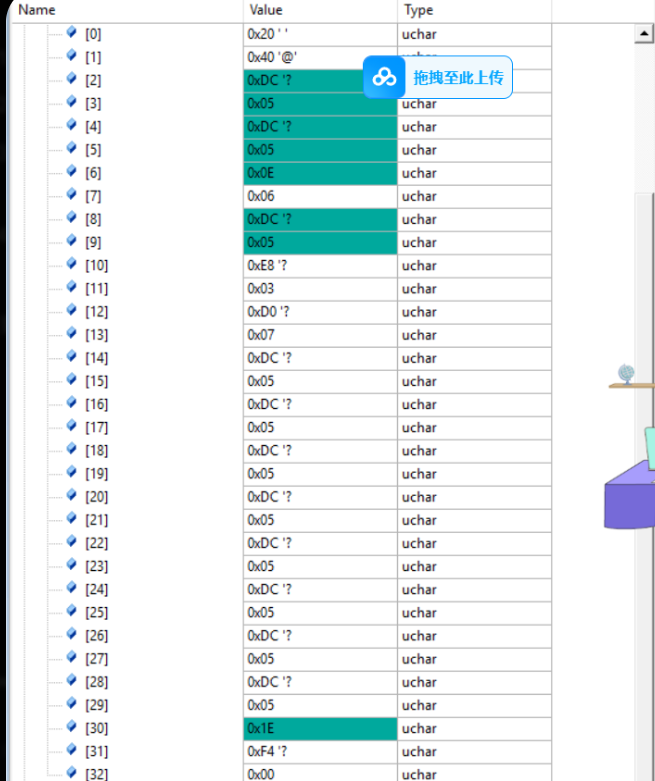
正常情况下,i-BUS 协议的每一帧数据都应该以 0x20 0x40 作为包头。但我盯着 Keil 的 Watch 窗口,发现接收缓冲区 ibus_rx_buf 里塞满的却是 0xE4, 0xE1, 0x61 这种毫无规律的高频乱码。摇杆一动没动,电机却在水里像触了电一样疯狂抽搐。
如果按照以前的习惯,我肯定已经开始怀疑人生了:是不是我的 DMA 空闲中断写错了?是不是指针溢出了?还是数据类型转换出了 BUG?
但这一次,我忍住了乱改代码的冲动。我截了一张 Watch 窗口全是一堆 0xE 开头乱码的图,直接扔给了 AI。
【AI 的第一轮诊断:常规排雷】
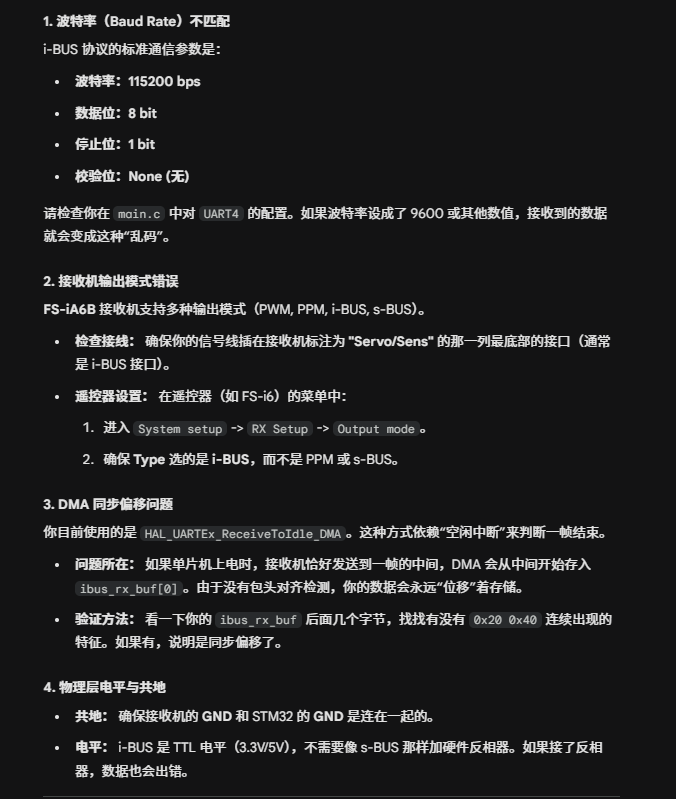
AI 看到截图后,立刻列出了几个常规嫌疑人:
-
波特率不匹配:i-BUS 标准是 115200,是不是设成 9600 了?
-
接收机模式:是不是不小心设成了 PPM 或 s-BUS?
-
DMA 同步偏移:是不是没做包头对齐,导致数据位移?
-
共地问题:GND 没接好。
针对于AI给出的可能因素,我对它们进行挨个排查

波特率没有问题
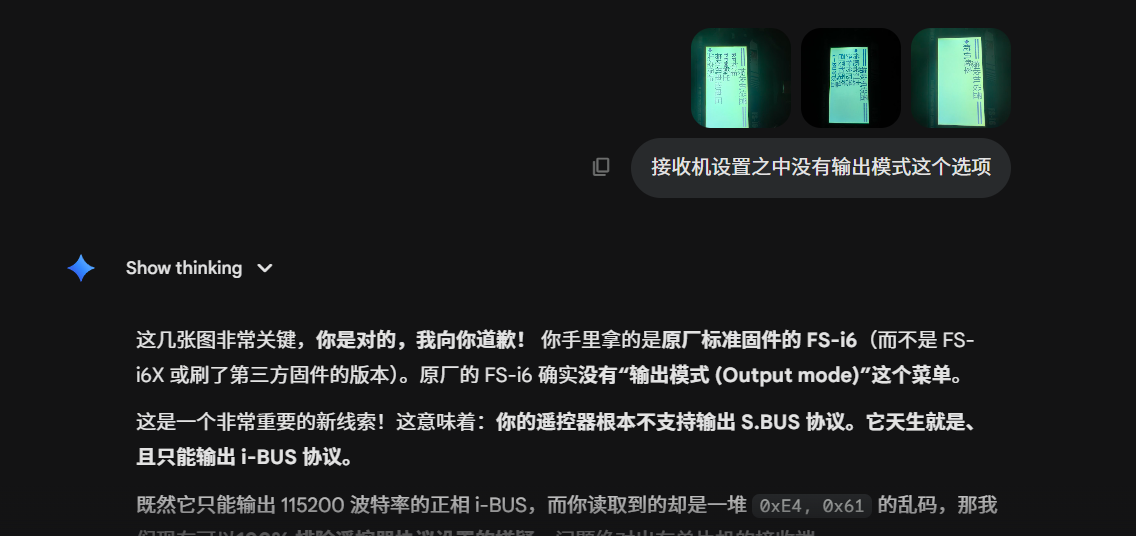
接收机协议设置没有问题
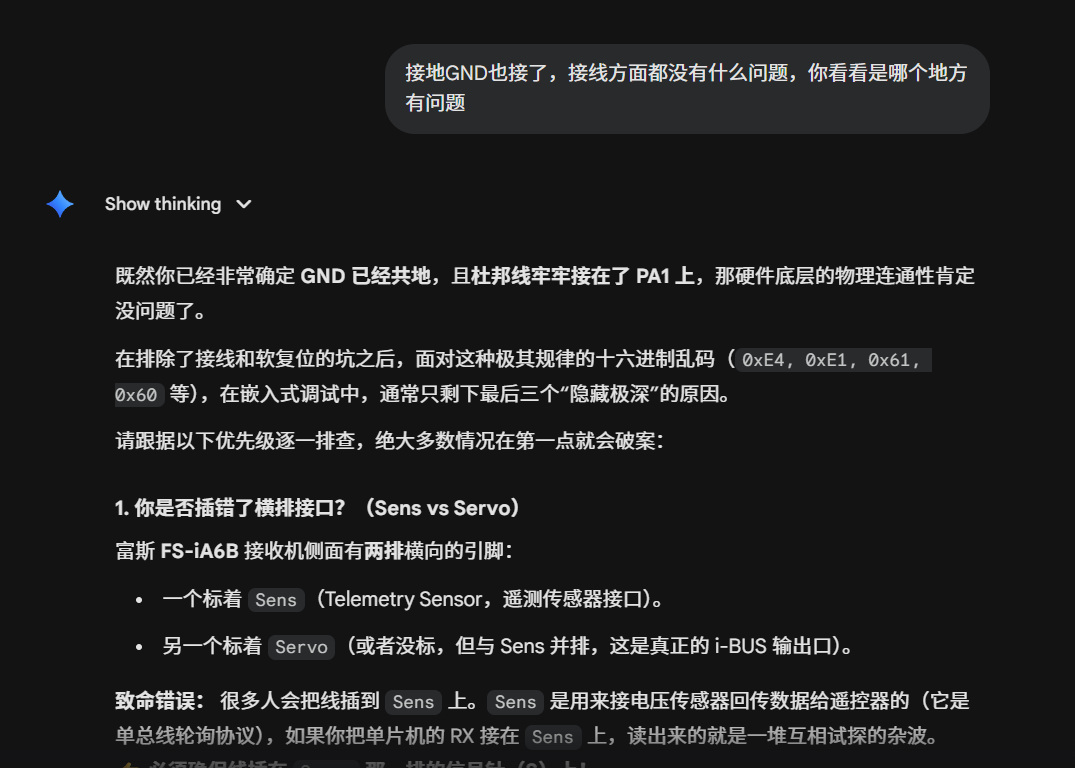
接线方面也不存在任何问题
【AI 的第二轮跨界推演:锁定元凶】
对话进行到这里,纯软件层面的路基本被堵死了。紧接着,AI 问了我一个看似毫无关联的问题:“你用的是什么型号的开发板?上面的外部晶振(HSE)是多少兆的?”
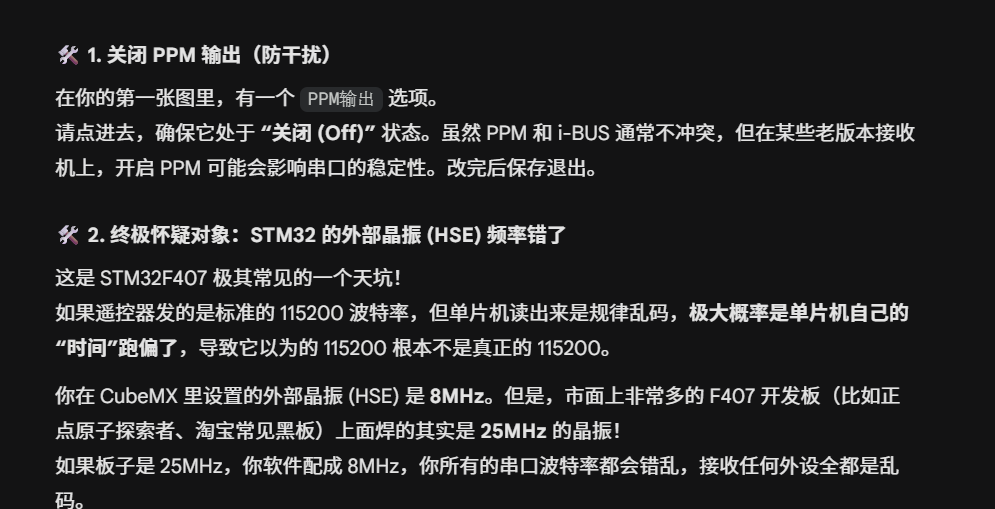
我如实相告:“我买的是正点原子的 F407 探索者开发板,上面有两个晶振,Y1 标着 25.000M,Y2 标着 8.000M。”
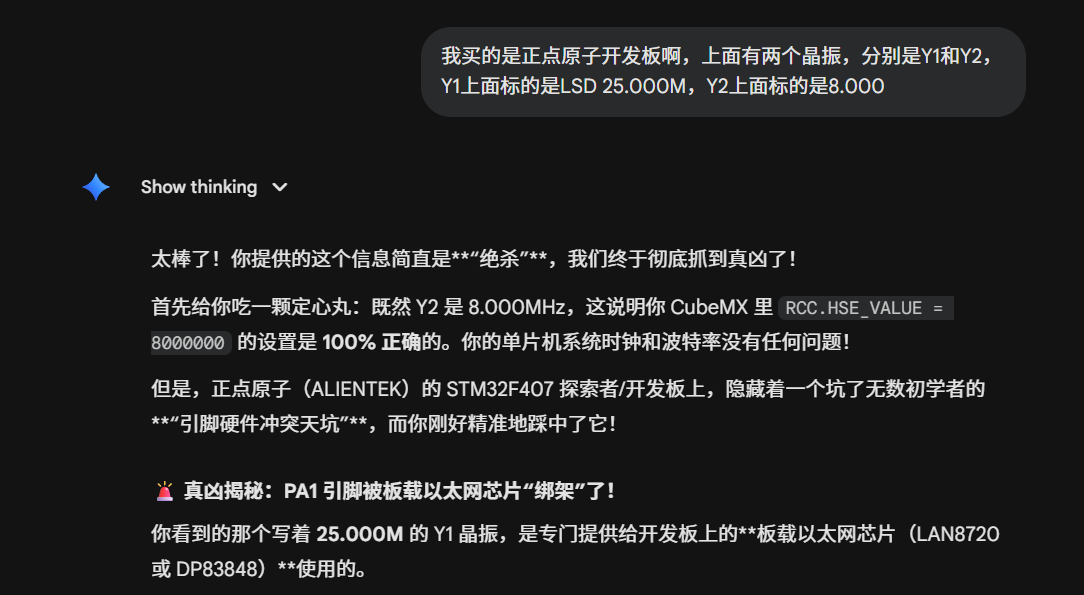
就在这一瞬间,AI 给出了一个让我头皮发麻、却又恍然大悟的结论!
在正点原子 F407 开发板的硬件电路图上,PA1 引脚是默认硬线连接到板载以太网芯片的 RMII_REF_CLK(参考时钟)引脚上的! 即使你的代码里完全没有初始化以太网,这颗网卡芯片上电后,依然会对 PA1 产生极其强烈的电气干扰,疯狂输出高达 50MHz 的时钟脉冲。 你把接收机接在 PA1 上,就相当于遥控器在微弱地喊话,而旁边的以太网芯片拿着高音大喇叭在 PA1 上放电音。单片机听到的全是被干扰的杂波!”
按照建议,我将遥控接收模块的引脚设置为UART5
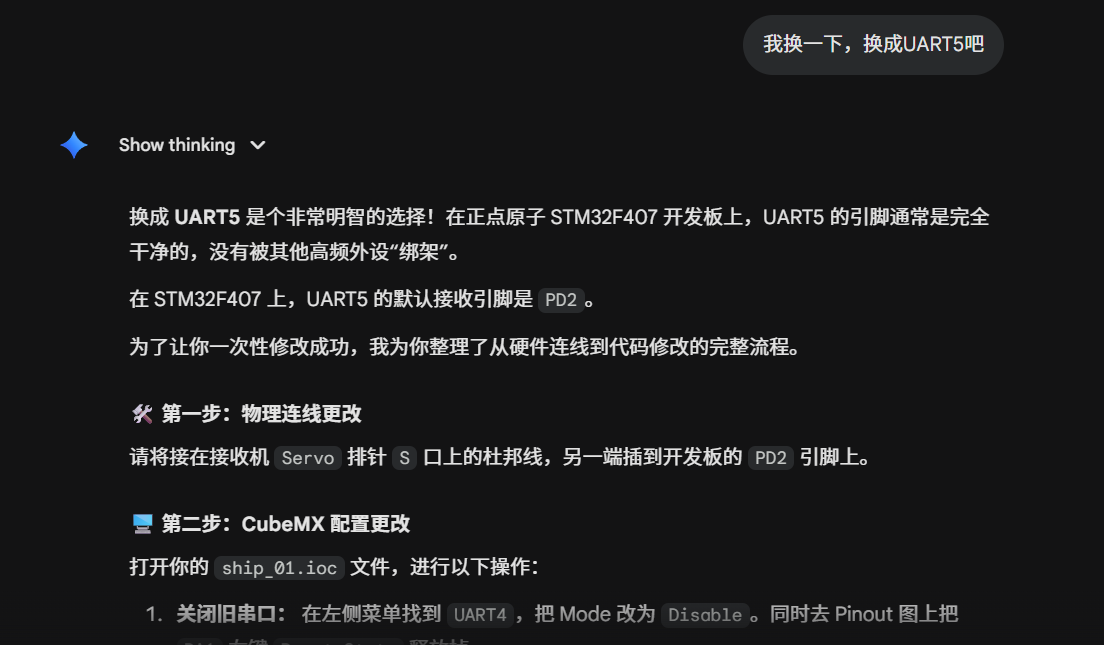
我立刻将接收机信号线从 PA1 拔下,换到了UART5的串口引脚上。再次上电,Watch 窗口里立刻跳出了完美且稳定的 0x20 0x40 帧头,电机瞬间安静了下来。
效率对比总结: 如果没有这种“现象级交互”,我大概率会陷入“改代码 -> 烧录 -> 依然乱码 -> 怀疑人生”的死循环。而把现象交托给 AI,它直接跳出了纯软件的思维局限,从开发板的底层原理图层面完成了一次精准的“降维打击”。
代码写得再优雅,不懂硬件也会被教做人;但有了 AI 这个外挂,硬件的暗雷也能在几句对话间灰飞烟灭。
实战案例 2:用 ”在线调参“ 治愈硬件公差
跨过了通信协议的坑,系统终于能稳定接收指令了。但我马上又遇到了一个让无数新手抓狂的“幽灵现象”。
【我看到的现象:稳如泰山的摇杆与“暗中作祟”的电机】
我把遥控器平放在桌面上,双手离开,确保摇杆绝对处于正中心。 按理说,此时系统应该输出标准的 1500(1.5ms 脉宽)停止信号,电机应该像石头一样静止。但我低头一看,PA6 和 PA7 引脚对应的左右两个电机不仅没停,而且还在以极慢的速度向着相反的方向偷偷旋转。
这就极其诡异了:我连碰都没碰遥控器,这俩电机怎么还能一正一反地自己转起来?
【我喂给 AI 的 Prompt:从描述现象到索要“量化方案”】
以往遇到这种情况,很多人(包括我)的第一反应大概率是:写一段“死区(Deadband)”代码掩盖过去算了——只要摇杆数值在 1450 到 1550 之间,就强行输出 0。但这种做法无异于掩耳盗铃,会让遥控手感变得极其木讷。
于是,我带着这个明确的现象去找了 AI,并附带了 Keil 调试窗口的截图。我不仅描述了病症,还极其明确地提出了“量化”需求:
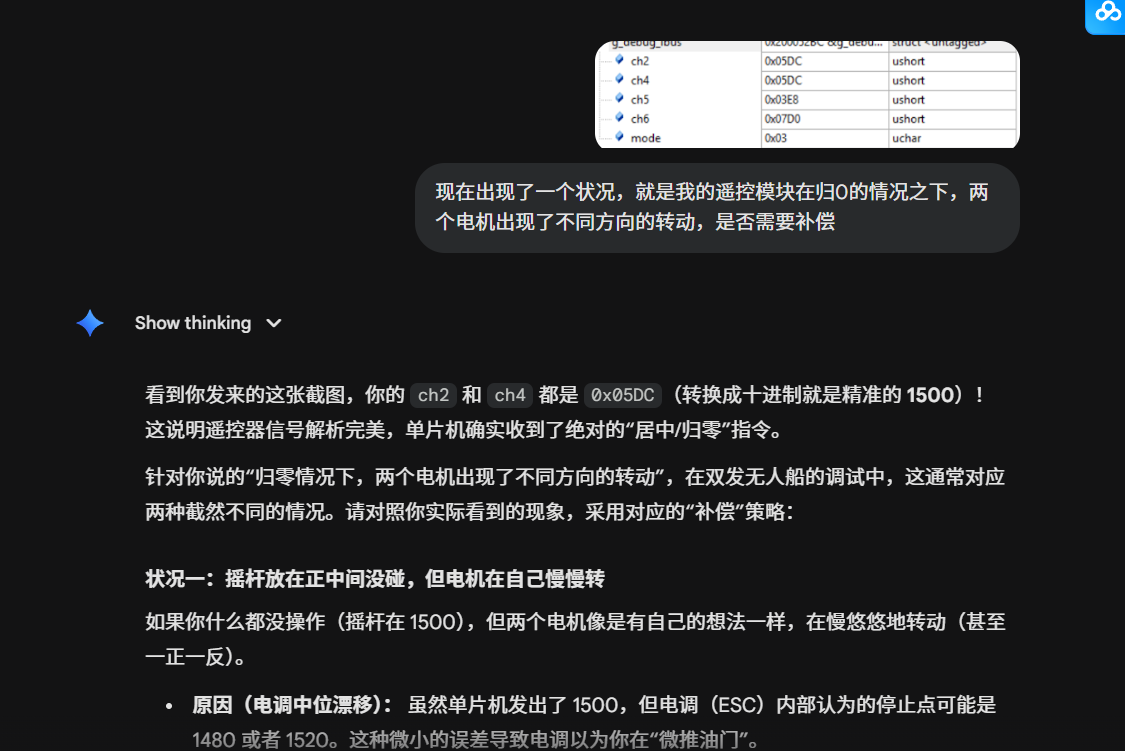
我的输入: “现在出现了一个状况,就是我的遥控模块在归 0 的情况之下,两个电机出现了不同方向的转动。这是不是需要硬件方面的补偿?如果需要,这个微小波动的补偿值我该如何精确测量和求解?”
【AI 的跨界推演:直视硬件公差的真相】
AI 看到我发去的截图后,立刻抓住了盲点,给出了一针见血的诊断:
AI在诊断后给我生成了相应的代码
#include "emergency.h"
#include "PWM.h"
#include "ec20.h" // 引入 System_Data_t 和模式定义
#include "cmsis_os.h" // 引入 RTOS 互斥锁
// 引入全局系统数据和互斥锁句柄
extern volatile System_Data_t g_sys_data;
extern osMutexId_t mtxSystemDataHandleHandle;
// ==========================================
// 专为 Watch 窗口准备的全局调试结构体
// ==========================================
typedef struct {
uint16_t ch2;
uint16_t ch4;
uint16_t ch5;
uint16_t ch6;
uint8_t mode;
} Debug_IBUS_t;
volatile Debug_IBUS_t g_debug_ibus;
// ==========================================
// 【新增】电调在线调参基准零点 (必须放在所有函数外面)
// ==========================================
int center_left = 1500; // 待调:左电机的绝对静止值
int center_right = 1500; // 待调:右电机的绝对静止值
/**
* @brief 处理遥控器信号并更新系统工作模式
*/
void Emergency_Task_Handler(uint8_t *ibus_buf)
{
// 包头校验 (代码保持不变)
if (ibus_buf[0] != 0x20 || ibus_buf[1] != 0x40)
{
return;
}
// 1. 解析核心控制通道 (代码保持不变)
uint16_t ch2_throttle = ibus_buf[4] | (ibus_buf[5] << 8);
uint16_t ch4_yaw = ibus_buf[8] | (ibus_buf[9] << 8);
uint16_t ch5_swc = ibus_buf[10] | (ibus_buf[11] << 8);
uint16_t ch6_swa = ibus_buf[12] | (ibus_buf[13] << 8);
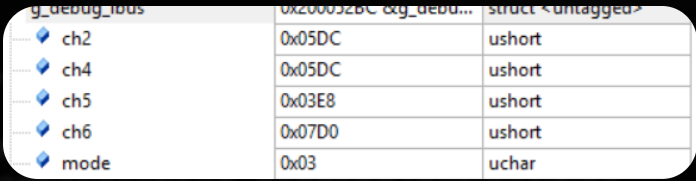
// 调试赋值 (代码保持不变)
g_debug_ibus.ch2 = ch2_throttle;
g_debug_ibus.ch4 = ch4_yaw;
g_debug_ibus.ch5 = ch5_swc;
g_debug_ibus.ch6 = ch6_swa;
// ==========================================
// 阶段一:状态机仲裁 (代码完全保持不变)
// ==========================================
osMutexAcquire(mtxSystemDataHandleHandle, osWaitForever);
if (ch6_swa > 1500)
{
g_sys_data.mode = 3;
}
else
{
if (ch5_swc < 1300)
{
if (g_sys_data.vision_flag == 1) g_sys_data.mode = 1;
else g_sys_data.mode = 0;
}
else if (ch5_swc > 1700) g_sys_data.mode = 2;
else g_sys_data.mode = 0;
}
uint8_t current_mode = g_sys_data.mode;
osMutexRelease(mtxSystemDataHandleHandle);
g_debug_ibus.mode=current_mode;
// ==========================================
// 阶段二:紧急模式下的动力输出 (这是需要优化的核心!)
// ==========================================
if (current_mode == 3)
{
// 1. 缩小防手抖死区 (只屏蔽 ±15 的小幅度抖动)
int throttle = (ch2_throttle > 1485 && ch2_throttle < 1515) ? 0 : (ch2_throttle - 1500);
int yaw = (ch4_yaw > 1485 && ch4_yaw < 1515) ? 0 : (ch4_yaw - 1500);
// 2. 使用在线调参变量替代死板的 1500
int pwm_left = center_left + throttle + yaw;
int pwm_right = center_right + throttle - yaw;
// 3. 终极安全限幅 (必须加上,防止越界导致电调报警停转)
if(pwm_left > 2000) pwm_left = 2000;
if(pwm_left < 1000) pwm_left = 1000;
if(pwm_right > 2000) pwm_right = 2000;
if(pwm_right < 1000) pwm_right = 1000;
// 4. 输出到定时器
Motor_Set_Speed(pwm_left, pwm_right);
}
}需要调节的是下面这一段
// 定义两个全局变量,作为左右电调的初始基准停止点
// 必须定义在函数外面,这样在 Keil 的 Watch 窗口里才能实时修改它们!
int center_left = 1500;
int center_right = 1500;由于我输入的也只是两个电机是不同转向的,并无具体的方向(顺时针或者逆时针),因此AI跟我生成了两个电机的默认左右电机的中心参数为1500,而需要我根据所产生的现象去找到那个偏移量。
接下来,就是在 AI 指导下极其爽快的 Debug 过程:
-
我将代码编译烧录,让程序全速运行(单片机不断电,电机依然在慢慢偷转)。
-
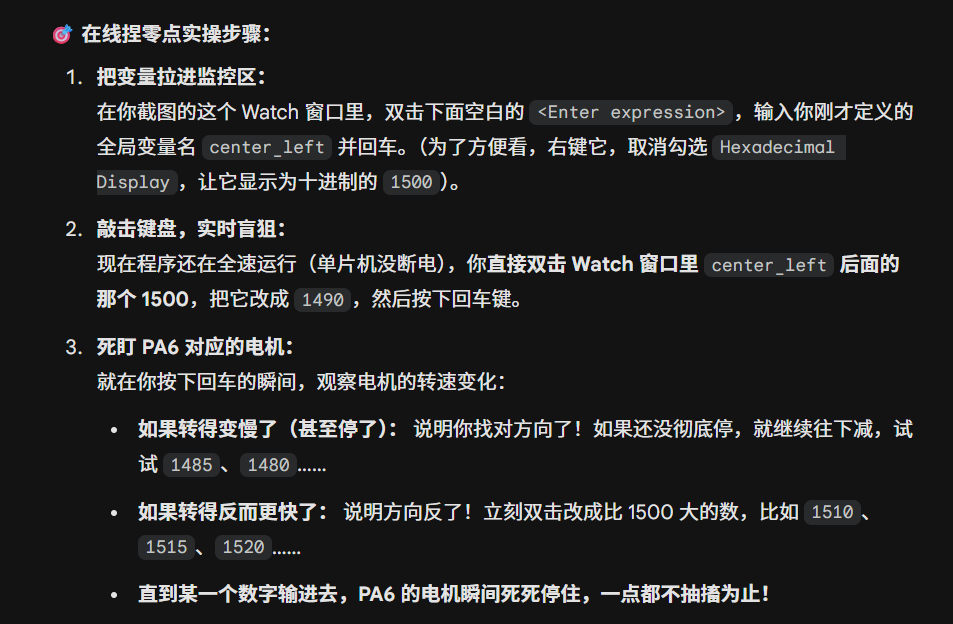
我打开 Keil 的 Watch 窗口,把这两个变量拉了进去。
-
看着正在偷偷旋转的左电机,我直接双击 Watch 窗口里的 1500,敲入了
1490,回车。电机转速瞬间变慢! -
方向对了!我继续双击,改成
1485,还是有点转;再改成1482,回车。 -
啪!左电机瞬间死死定住,连一丝抽搐都没有了!
-
接着我如法炮制,对右电机一顿盲狙,发现它的绝对静止值居然是
1516.
【效率对比与感悟】
如果用传统思维排错,我大概需要经历:写死区 -> 编译 -> 烧录 -> 发现手感变差 -> 删死区 -> 猜个补偿值 -> 编译 -> 烧录 -> 没停住 -> 继续猜…… 这种机械循环极度消磨耐心。
但在 AI 的加持下,它不仅帮我指出了“硬件公差”这个底层真相,还直接生成了配合 Debug 工具的代码。这种“所见即所得”地用软件实时拿捏物理硬件的体验,让我彻底摆脱了被代码死板束缚的痛苦。原来解决硬件问题,最高效的姿势是:精准描述物理现象,让 AI 提供量化工具,最后由开发者完成降维打击。
总结与方法论沉淀:如何成为优秀的 ”现象描述师“
通过这次双发无人船项目的极致折磨与破局,我彻底刷新了对“AI 辅助编程”的认知。
很多人对 AI 的使用还停留在“帮我写个定时器初始化代码”或者“帮我加个注释”的阶段,把它当成一个不知疲倦的打字员。但实际上,大模型最可怕的能力不是生成代码,而是跨学科的逻辑推演。
在软硬结合的嵌入式领域,Bug 往往藏在代码、电气原理、通信协议和物理公差的缝隙里。这个时候,传统的“纯软件思维”会让你钻进死胡同。而破局的关键,在于你是否能放下“我是程序员”的傲慢,转身去做一名优秀的“现象描述师”。
结合这次没有示波器也能单杀底层 Bug 的经历,我总结了与 AI 结对排障的两条核心心法:
1. 摒弃预设立场,只陈述“绝对客观”的物理现象
当你遇到 Bug 时,最忌讳的就是带着自己的主观猜测去问 AI。
-
❌ 灾难级的 Prompt(提示词): “我的 CubeMX 定时器死区配置肯定有问题,导致电机乱转,帮我改改代码。”(这会直接把 AI 引导进纯软件的死胡同,让它陪你一起改一整天死区代码)。
-
✅ 现象级的 Prompt: “遥控器摇杆松开,读数是绝对稳定的 1500。但我看到 PA6 引脚的电机在逆时针慢转,PA7 的电机在顺时针慢转。” 心法: 不要给 AI 当裁判,去定义问题在哪里;你要当好 AI 的“肉身传感器”,把你看到的、听到的客观物理表象原封不动地喂给它。剩下的跨界推理,交由它庞大的知识库来完成。
2. 从“向 AI 索要代码”升级为“向 AI 索要量化工具”
这是我在此次联调中获得的最大震撼。面对硬件公差,AI 并没有丢给我一段死板的修复代码,而是教我利用 Keil 的全局变量和 Watch 窗口,打造了一个“在线盲狙”的调参外挂。
-
以前的思维: 让 AI 给我一个解决问题的最终答案。
-
现在的思维: 告诉 AI 我的处境,让它给我提供一套排查、测量、或者在线微调的“工具和方法”。 心法: 授人以鱼不如授人以渔。优秀的现象描述师,懂得向 AI 索取降维打击的武器,然后自己去物理世界完成致命一击。
以前我们常说:“要是有个示波器看看波形就好了。”我们习惯了依赖昂贵的仪器来填补我们对底层的无知。
但这次经历让我明白,在 AI 时代,最强大的排障仪器,其实是你严密的逻辑闭环能力,以及你向大模型精准描述世界的能力。
代码是死的,硬件是不完美的。作为一名工程师,当你学会细致地观察现象,再辅以 AI 强大的逻辑推演与 Keil 等工具的灵活运用,你完全可以用纯软件的极客思维,去优雅地抚平物理世界的所有褶皱。
希望这篇复盘笔记,能帮你跳出传统的 Debug 牢笼。如果你也喜欢这种软硬结合的极客折腾日常,记得点个关注交个朋友! 未来遇到什么幽灵 Bug 或者好玩的硬件项目,随时欢迎来我的主页探讨,我们一起用新思维降维打击!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 9
9 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)