(论文速读)SN-CA-SSD:轻量级风机叶片缺陷检测新方法
论文题目:Defect Detection Using Shuffle Net-CA-SSD Lightweight Network for Turbine Blades in IoT(基于Shuffle Net-CA-SSD轻量级网络的物联网涡轮叶片缺陷检测)
期刊:IEEE INTERNET OF THINGS JOURNAL
摘要:叶片缺陷的早期检测对于物联网(IoT)涡轮机至关重要,因为它可以防止故障,最大限度地减少停机时间,并提高系统可靠性。基于深度学习的方法提高了缺陷识别和分类的准确性。然而,在识别效率、准确性和检测小目标的能力之间的平衡方面存在着挑战。为此,本文建立了基于ShuffleNetv2和协同关注(SNCA-SSD)的物联网中涡轮叶片单次多盒检测的轻量化缺陷检测模型。首先,在单镜头多盒检测器框架内,ShuffleNetv2取代VGG-16网络作为基本特征提取网络。这种替换确保了检测的准确性,同时降低了模型的复杂性。其次,在特征映射之后引入坐标注意机制,对重要特征进行加权,增强模型对关键信息的感知能力;最后,利用EIoU (Efficient Intersection over Union)损失对损失函数进行了重新设计,提高了检测目标的精度和定位精度。将该方法应用于涡轮叶片缺陷检测图像,结果表明,该算法显著提高了检测精度、检测效率和检测小目标的能力,在精度和效率之间取得了平衡。通过将模型与可解释算法相结合,从表示可视化的角度分析算法的决策过程,增强算法的可解释性。
轻量级风机叶片缺陷检测新方法:SN-CA-SSD 详解
一、研究背景与动机
随着工业物联网(IoT)的快速发展,风力发电作为清洁能源的重要组成部分受到广泛关注。风机叶片是风力发电系统的核心部件,长期暴露于高温、高速、强腐蚀的恶劣环境中,极易出现疲劳损伤乃至断裂,由此引发严重安全事故。因此,对风机叶片进行早期缺陷检测,对于预防故障、减少停机时间、提升系统可靠性具有重大的工程意义。
近年来,深度学习方法已被广泛应用于缺陷检测领域,其通过网络结构自动提取特征,无需手工特征工程,具备较强的泛化性和鲁棒性。然而,现有方法仍面临以下几个核心挑战:
1.1 现有方法的主要问题
(1)模型复杂度过高,难以部署于IoT设备
以 Faster-RCNN 为代表的两阶段检测器参数量高达 137M,FLOPs 达 226.408G,单张图片检测耗时 1.16 秒,远不满足实时部署需求。传统 SSD 以 VGG-16 为骨干网络,参数量为 26.29M,FLOPs 为 62.798G,效率同样不够理想。
(2)小目标缺陷检测能力不足
早期裂纹、微小孔洞等小尺寸缺陷在特征图上的响应极弱,现有模型容易漏检,制约了缺陷的早期发现。
(3)损失函数设计不够精细
原始 SSD 的定位损失采用简化的 IoU 计算方式,未考虑检测框的形状、尺度等几何细节,导致边界框回归精度不足,定位误差较大。
(4)模型可解释性差,工程信任度低
深度学习模型的"黑箱"特性使得决策过程不透明,工程人员难以理解模型判断依据,降低了实际部署的信任度与可接受程度。
(5)效率与精度难以兼顾
YOLOv5 的 mAP 仅为 86.52%,YOLOv6 提升至 92.67%,但参数量(37.62M)和 FLOPs(106.472G)仍然偏高;Faster-RCNN 精度为 89.24%,但速度极慢。现有方法均未能在精度、速度与模型轻量化三者之间取得良好平衡。
二、论文提出的方法:SN-CA-SSD
针对上述挑战,本文提出了一种轻量级风机叶片缺陷检测模型——SN-CA-SSD(Single-shot Multibox Detection based on ShuffleNetv2 and Coordinate Attention),围绕以下四个核心创新点展开设计。
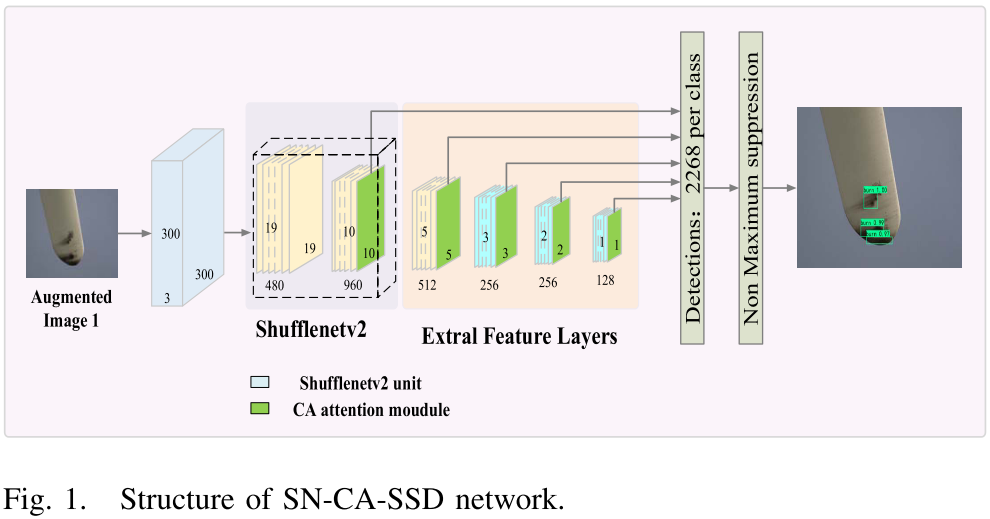
📷 【此处配图:图1 SN-CA-SSD网络整体结构图(Fig. 1)】
2.1 创新一:以 ShuffleNetv2 替代 VGG-16 作为骨干网络
设计思路:传统 SSD 以 VGG-16 作为特征提取骨干,参数量大、计算开销高。本文引入 ShuffleNetv2 这一轻量级高效神经网络架构,作为新的骨干网络。
技术细节:
- ShuffleNetv2 通过通道混洗(Channel Shuffle)和分组卷积(Group Convolution)减少参数量和计算量。
- 每个 ShuffleNet 单元由 1×1 卷积、3×3 深度可分离卷积(DW Conv)和另一个 1×1 卷积组成。
- 模型分为三个阶段:第一阶段含 3 个 ShuffleNet 单元,提取低层特征;第二阶段含 7 个单元,作为主要特征提取网络;第三阶段含 3 个单元,进行高层特征提取。
- 用步长为 2 的卷积层代替池化层,在缩小特征图尺寸的同时,减少信息损失并降低参数量。
效果:在保持检测精度的前提下,大幅降低模型复杂度,实现快速推理,适合在 IoT 边缘设备上部署。
2.2 创新二:嵌入坐标注意力机制(Coordinate Attention, CA)
设计思路:为了增强模型对关键缺陷区域的感知能力,本文在 ShuffleNetv2 的特征图输出后嵌入坐标注意力(CA)模块,共在骨干网络输出和额外特征层的4个模块中共添加了5个CA机制。
CA 机制的工作原理分为两个核心步骤:
① 坐标信息嵌入
利用全局池化,分别沿水平和垂直方向对输入特征图 X 进行编码,生成携带空间位置信息的通道描述子:
这一步同时保留了空间依赖关系和精确的位置信息,弥补了传统通道注意力(如 SE 模块)忽略空间信息的缺陷。
② 注意力权重生成
将水平和垂直方向的特征图拼接后,经过 1×1 卷积、Batch Norm 和非线性激活,得到中间特征图 f;再沿空间维度分离为两个张量,分别通过独立卷积和 Sigmoid 激活得到水平注意力权重 和垂直注意力权重
;最终输出:
效果:CA 模块自适应地学习通道权重,突出目标特征响应,显著提升了对小目标缺陷的检测精度和定位能力。
2.3 创新三:改用 EIoU 损失函数优化边界框回归
设计思路:原始 SSD 损失函数的定位部分过于简单,本文将定位损失替换为 EIoU(Efficient Intersection over Union)损失,对边界框回归进行更精细的建模。
技术细节:EIoU 在 CIoU 的基础上进行改进,将边界框回归损失分解为三个独立分量:
- 重叠损失(Loss_iou):预测框与真实框的交并比
- 中心距离损失(Loss_dis):两框中心点的距离惩罚
- 宽高损失(Loss_asp):直接最小化预测框与真实框的宽度差和高度差
最终总损失函数为:
其中 ,
。
相比 CIoU,EIoU 直接独立优化宽高差,收敛速度更快,对小目标和密集目标的处理效果更佳,还能降低重叠框的误检率。
2.4 创新四:引入 Augmented Grad-CAM++ 可解释性分析
为提升模型在工程场景中的透明度与可信度,本文结合 Augmented Grad-CAM++ 算法对各模型最终层的特征提取过程进行可视化,生成热力图以直观呈现模型关注的缺陷区域。
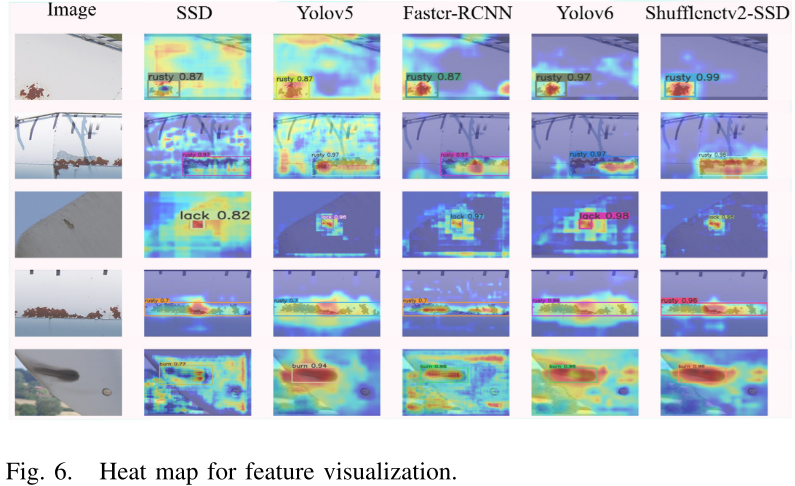
📷 【此处配图:图6 不同方法的热力图特征可视化对比(Fig. 6)】
三、实验设置
3.1 实验环境
- 框架:TensorFlow
- 硬件:Intel Core i7-11700 CPU @ 2.50 GHz,8GB RAM,Windows 10
- 学习率:0.002–0.01(网格搜索确定最优值)
- 批大小(Batch Size):200
- 数据增强:旋转、平移等几何增强
3.2 数据集
实验使用一个公开的IoT采集风机叶片缺陷图像数据集,包含数千张图像,涵盖以下7类样本:
| 类别 | 说明 |
|---|---|
| Burn(烧伤) | 高温造成的表面灼伤 |
| Crack(裂纹) | 疲劳或冲击造成的裂缝 |
| Exfoliation(剥落) | 涂层或材料脱落 |
| Hole(孔洞) | 贯穿性损伤 |
| Lack(缺料) | 材料缺失 |
| Rusty(锈蚀) | 腐蚀性损伤 |
| Normal(正常) | 无缺陷参考样本 |
四、实验结果与分析
4.1 精度对比(mAP)
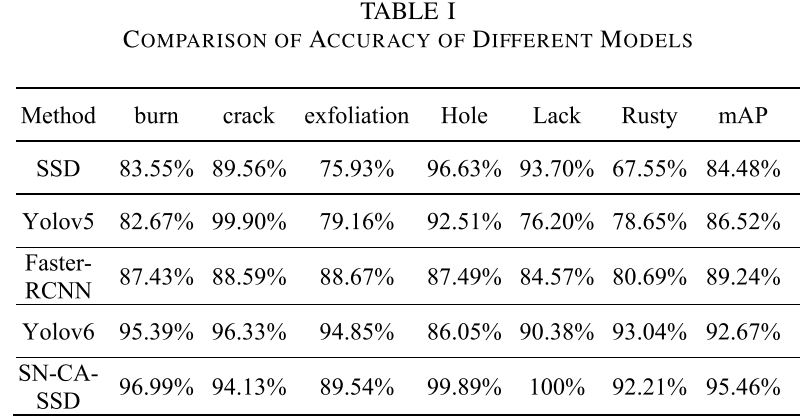
📊 【此处配表:表I 不同模型精度对比(Table I)】

📷 【此处配图:图2 不同方法检测效果对比图(Fig. 2)】
SN-CA-SSD 在各类缺陷上的平均精度(mAP)达到 95.46%,显著优于其他对比方法:
- 较基础 SSD(84.48%)提升约 11个百分点
- 较 YOLOv5(86.52%)提升约 9个百分点
- 较 Faster-RCNN(89.24%)提升约 6个百分点
- 较 YOLOv6(92.67%)提升约 3个百分点
值得注意的是,SN-CA-SSD 在 Hole 类别上达到 99.89%,Lack 类别上达到 100%,体现了其对不同尺度和形状缺陷的强适应能力。
4.2 召回率对比(Recall)
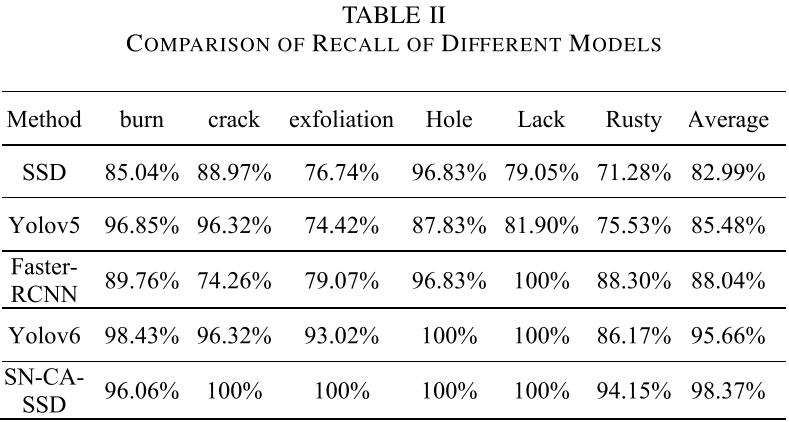
📊 【此处配表:表II 不同模型召回率对比(Table II)】
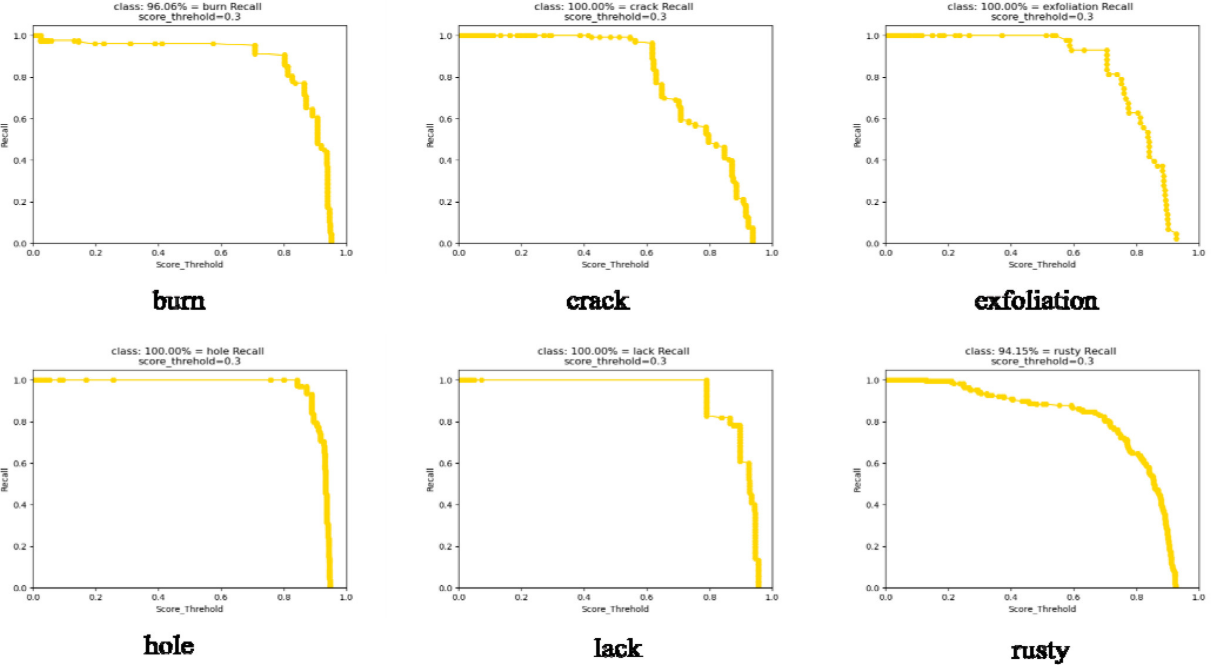
📷 【此处配图:图3 SN-CA-SSD召回率曲线(Fig. 3)】
SN-CA-SSD 的平均召回率为 98.37%,超越所有对比方法(YOLOv6为 95.66%),说明该模型能发现更多真实缺陷,漏检率更低,在安全关键场景中尤为重要。
4.3 F1 值对比
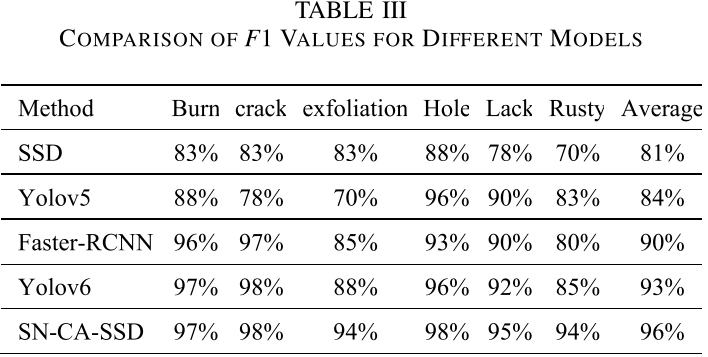
📊 【此处配表:表III 不同模型F1值对比(Table III)】
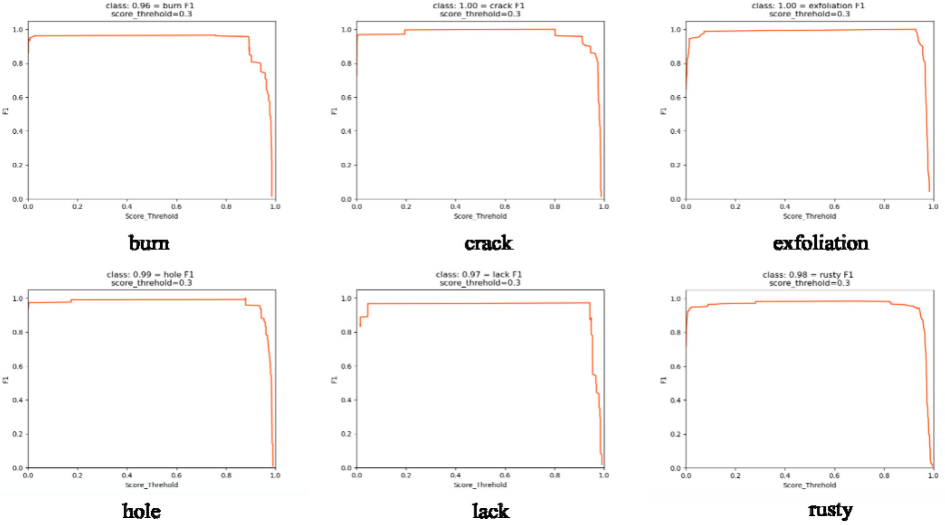
📷 【此处配图:图4 SN-CA-SSD F1曲线(Fig. 4)】
SN-CA-SSD 的 F1 值达到 97%,在精确率和召回率上均表现优异,综合性能最佳(YOLOv6为 93%,Faster-RCNN 为 90%)。
4.4 效率与模型复杂度对比
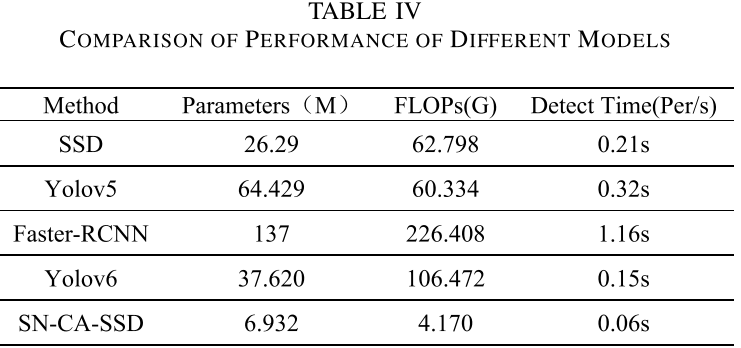
📊 【此处配表:表IV 不同模型性能效率对比(Table IV)】
这是 SN-CA-SSD 最突出的优势所在:
| 指标 | SSD | YOLOv5 | Faster-RCNN | YOLOv6 | SN-CA-SSD |
|---|---|---|---|---|---|
| 参数量(M) | 26.29 | 64.43 | 137 | 37.62 | 6.932 |
| FLOPs(G) | 62.798 | 60.334 | 226.408 | 106.472 | 4.170 |
| 检测时间(s/张) | 0.21 | 0.32 | 1.16 | 0.15 | 0.06 |
SN-CA-SSD 的参数量仅为基础 SSD 的 26%,FLOPs 仅为其 6.6%,检测速度提升近 4倍,充分验证了其轻量化设计的有效性,完全满足 IoT 边缘部署的资源约束需求。
4.5 消融实验
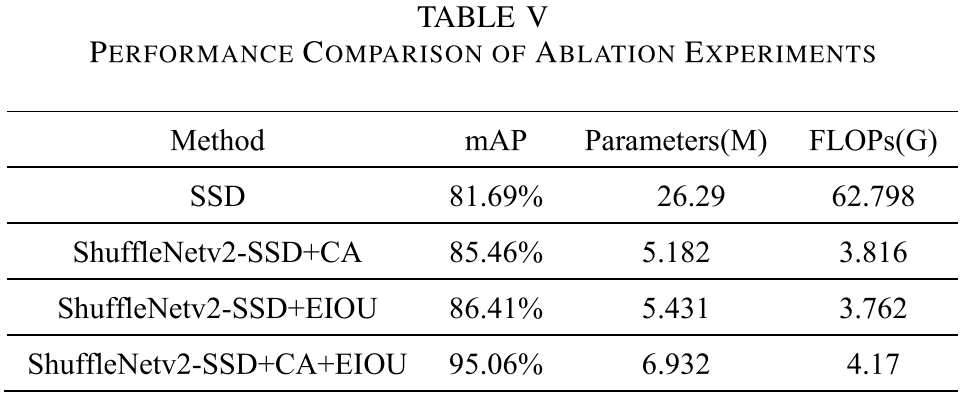
📊 【此处配表:表V 消融实验性能对比(Table V)】
为验证各模块的独立贡献,论文进行了系统的消融实验:
| 模型配置 | mAP | 参数量(M) | FLOPs(G) |
|---|---|---|---|
| SSD(基线) | 81.69% | 26.29 | 62.798 |
| ShuffleNetv2-SSD + CA | 85.46% | 5.182 | 3.816 |
| ShuffleNetv2-SSD + EIoU | 86.41% | 5.431 | 3.762 |
| ShuffleNetv2-SSD + CA + EIoU(完整模型) | 95.06% | 6.932 | 4.17 |
结果清晰表明:三个模块各有贡献,CA 机制和 EIoU 损失函数的协同作用带来了最大幅度的精度提升,同时模型复杂度始终远低于基线 SSD。
4.6 混淆矩阵分析
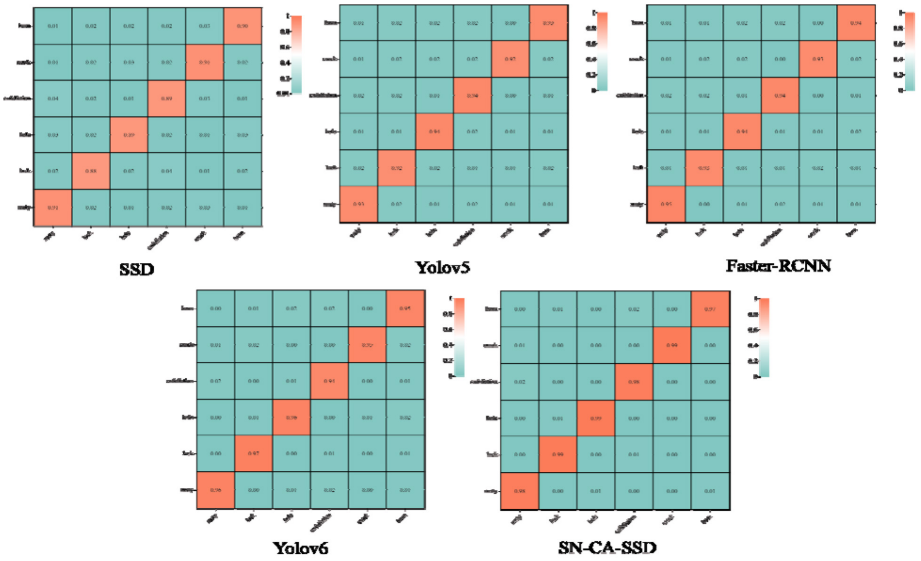
📷 【此处配图:图5 不同方法的混淆矩阵对比(Fig. 5)】
混淆矩阵结果显示,SN-CA-SSD 在区分正常叶片与各类缺陷类别时表现最为优异,误分类率最低,能以更高精度定位缺陷区域。
4.7 可解释性实验
可解释性实验从三个维度评估各模型的特征提取能力:
(1)弱监督目标定位(mIoU)
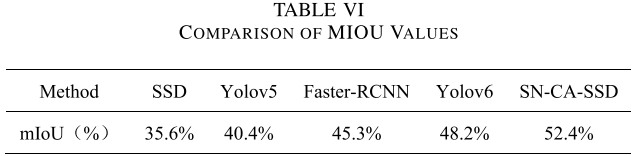
📊 【此处配表:表VI mIoU值对比(Table VI)】
SN-CA-SSD 的 mIoU 为 52.4%,高于其他模型(SSD: 35.6%,YOLOv5: 40.4%,Faster-RCNN: 45.3%,YOLOv6: 48.2%),表明其特征提取网络更精准地捕获了缺陷区域的关键特征。
(2)Pointing Game 评估
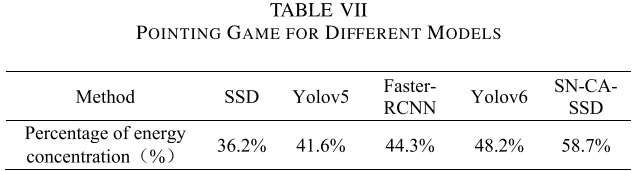
📊 【此处配表:表VII 不同模型Pointing Game结果(Table VII)】
SN-CA-SSD 的能量集中比例达 58.7%,高于 YOLOv6 的 48.2% 和 SSD 的 36.2%,证明模型的激活能量更集中于真实缺陷区域,定位更准确。
(3)人类信任度评估
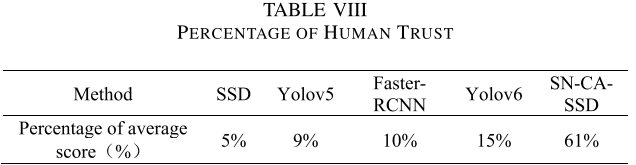
📊 【此处配表:表VIII 人类信任度百分比(Table VIII)】
实验邀请 100 名参与者对 150 张缺陷图像的可视化热力图进行主观评价,结果显示 61% 的参与者认为 SN-CA-SSD 生成的热力图最能准确解释模型决策,远超其他方法,大幅提升了工程人员对模型的信任度。
五、结论与展望
本文提出的 SN-CA-SSD 模型通过三重技术创新的协同配合,成功解决了工业IoT场景下风机叶片缺陷检测的核心矛盾:
- ✅ 轻量化:参数量 6.932M,FLOPs 仅 4.170G,适合边缘部署
- ✅ 高精度:mAP 95.46%,Recall 98.37%,F1 达 97%
- ✅ 实时性:单图检测时间仅 0.06 秒
- ✅ 强解释性:mIoU 52.4%,人类信任度 61%
- ✅ 小目标友好:Hole 类 AP 达 99.89%,Lack 类达 100%
该模型在精度、效率与可解释性三者之间取得了出色的平衡,具备较高的工程应用价值,未来有望进一步推广至更多工业设备的视觉检测场景。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 4
4 0
0- 0



 已为社区贡献51条内容
已为社区贡献51条内容

所有评论(0)