从仿真到现实:Sim2Real 迁移的完整工程实践
一、为什么 Sim2Real 是机器人的“龙门”
在仿真环境里跑得再好的算法,一上真机就“水土不服”——这是绝大多数机器人团队的噩梦。原因很简单:仿真是对物理世界的近似,永远无法完全复现真实环境中的摩擦、弹性、延迟、传感器噪声等细节。
Sim2Real 的核心不是追求完美仿真,而是构建一个高效的迭代闭环:在仿真中快速训练策略,通过一系列工程技术将其可靠地迁移到真机,并利用真实数据持续优化。
二、Sim2Real 全景路线图
整个流程可以概括为六个步骤,形成一个闭环迭代系统:
-
任务定义与仿真环境搭建:选择高保真仿真器(NVIDIA Isaac Lab / MuJoCo / Gazebo),构建机器人URDF模型,校准动力学参数。
-
策略训练:在仿真中应用域随机化(随机质量、摩擦、光照等)和系统辨识,训练具有鲁棒性的策略。
-
仿真内测试与差距分析:定位仿真与现实的差异源头。
-
模型导出与迁移:将训练好的策略模型(如PyTorch)导出为ONNX格式,并部署到真机。
-
真机部署与验证:运行推理节点,叠加安全限幅、平滑滤波等保护。
-
数据反馈与迭代:采集真机失败数据,用于更新仿真参数或微调模型。
三、核心工程细节:如何把模型“迁”到真机
很多团队在“策略训练”上花了很多功夫,但在“怎么迁”上踩坑不断。迁移不是简单拷贝模型文件,而是要在真机上重建一个与仿真等价的推理‑控制闭环。
3.1 模型导出与优化
-
导出格式:推荐 ONNX,跨框架、跨平台,后续可用 ONNX Runtime 或 TensorRT 加速。
-
优化操作:FP32 → FP16/INT8 量化、算子融合、常量折叠。在 NVIDIA Jetson 上使用 TensorRT 可获得数倍推理加速。
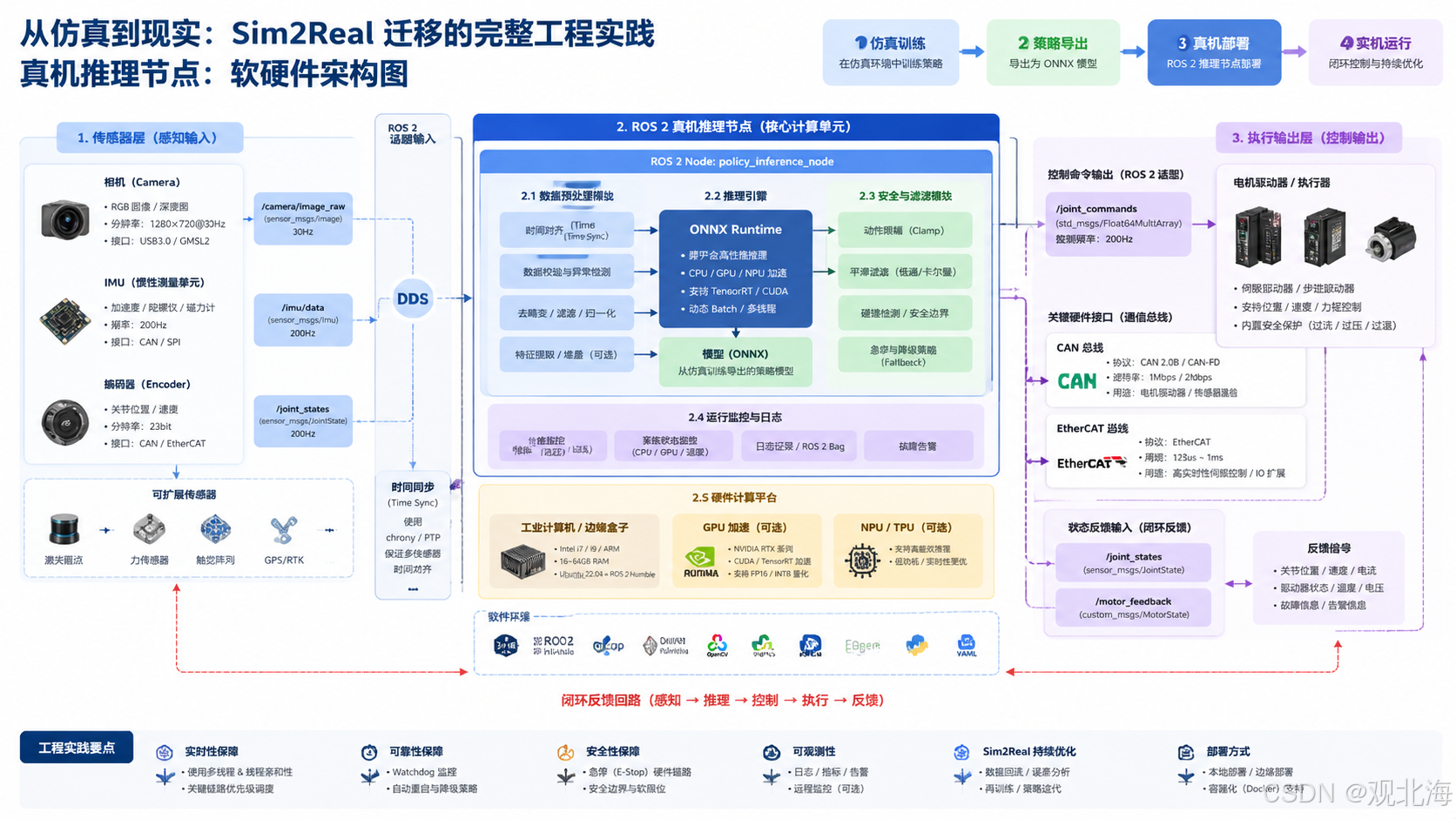
3.2 真机推理节点(ROS 2 + ONNX Runtime)
将 ONNX 模型封装为 ROS 2 节点是最实用的部署方式。节点结构如下:
-
订阅原始数据话题,接收图像或传感器消息。
-
内部维护一个
Ort::Session对象,执行session.run()。 -
对输出进行后处理(如去归一化、限幅),再发布到控制话题。
关键点:观测映射必须与仿真完全一致——单位、坐标系、编解码器零点偏移、滤波器参数等,差一个符号都会导致真机崩溃。
3.3 安全包装层
直接下发模型输出的控制指令非常危险。必须在真机端加入:
-
动作幅值限幅(力矩/速度/位置)
-
低通平滑滤波
-
关节软限位与碰撞检测
-
硬件急停独立链路

四、实战案例:四足机器人 Sim2Real
以某款四足机器人为例:
| 阶段 | 实现 |
|---|---|
| 仿真训练 | Isaac Gym + 域随机化(质量 ±20%,摩擦 0.5~1.5) |
| 模型导出 | PyTorch → ONNX → TensorRT FP16 |
| 真机硬件 | Jetson Orin + ROS 2 + 底层 CAN 驱动 |
| 推理频率 | 200 Hz(TensorRT 下可达 500 Hz) |
| 安全措施 | 关节力矩限幅 + 机身倾角保护 + 碰撞检测 |
结果:仿真训练 2 小时,真机调试 2 天,实现稳定小跑。
五、常见陷阱与解决方案
| 现象 | 可能原因 | 解决方法 |
|---|---|---|
| 真机剧烈抖动 | 控制频率不足 / 观测延迟 | 提高推理频率或增加低通滤波 |
| 动作无力或偏离 | 动作尺度不一致 | 检查仿真与真机的力矩/位置单位,重新标定 |
| 对称行为异常 | 传感器零点偏移 | 执行关节/IMU 零位校准 |
| 推理延迟过高 | CPU 模型过重 | 转为 ONNX + TensorRT / 轻量化网络 |
六、总结
Sim2Real 的成功 = 高保真仿真 × 合理的域随机化 × 可靠的模型导出与部署链路 × 安全包装。它是一个需要多次迭代的工程实践,但一旦走通,将极大缩短机器人算法的迭代周期。
最终,请记住一句话:“迁移到 real”不是把模型拷贝过去,而是把仿真里的“观测→动作”闭环,用真机的传感器、计算芯片和执行器精确复现,同时兜住所有现实物理边界。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 8
8 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)