人形机器人半马刷新纪录,具身智能迎来“部署态”元年——当“会跑”的AI遇见“会思考”的大模型
① 引言
2026年4月19日,北京亦庄的人形机器人半程马拉松赛上,荣耀机器人以50分26秒的净用时夺冠,标志着双足仿生运动控制的又一技术节点。与此同时,国家电网印发规划,计划2026年集中采购具身智能设备约8500台,总投资约68亿元,重点聚焦电力巡检、带电作业等场景,推动电网从“人工运维”向“自主化运维”转型。
智元机器人董事长邓泰华在合作伙伴大会上断言,2026年将是具身智能的“部署态”元年。这一判断的背后,是“数据+硬件+标准”三大支柱的逐步完善:智元于4月开源了覆盖全域研究的真实场景数据集,国家市场监管总局于4月22日宣布,我国在ISO成功立项具身智能领域全球首项国际标准《人形机器人数据集》。
这些事件共同指向一个趋势:具身智能正在完成从“实验室概念验证”到“工业生产力部署”的关键跃迁。本文将从技术架构角度,探讨大模型与知识图谱作为“机器人大脑”对工业运维的深远影响。
② 技术解读主体
一、技术背景:从“能动”到“会思考”的进化
人形机器人的核心技术体系由“大脑”(决策)、“小脑”(控制)和“肢体”(执行)三部分组成。
传统机器人的“大脑”多以规则引擎或特定任务的判别式模型为主,其行为模式本质上是“感知-规划-执行”的开环或半开环控制。而基于多模态大模型的具身智能,则赋予了机器人“会思考”的能力。以夺冠的荣耀机器人为例,其背后的仓颉大模型在基础大模型之上,开发了具备实体世界模型能力的仿生强化学习算法。这使得机器人不仅能执行预设指令,更能感知物理环境中的力学、摩擦等隐性变化,并进行自主决策。
“肢体”的进化同样关键。早期液压驱动的人形机器人存在体积大、能耗高的缺点。当前,以电机驱动为核心的方案已成为主流。无框力矩电机在旋转关节中的应用,提供了高扭矩密度;空心杯电机则驱动灵巧手,实现精细操作。高精度减速器(谐波减速器、行星减速器)以及六维力传感器、惯性测量单元的集成,使得现代人形机器人具备了接近人类的运动灵活性和环境交互的敏感性。
二、核心技术解析:“机器人大脑”的知识基座
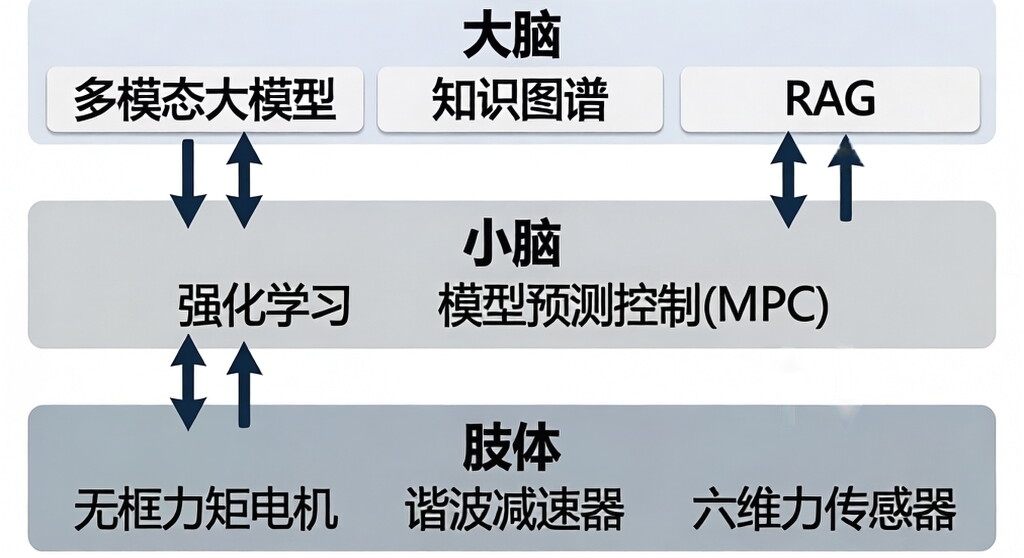
图1:人形机器人“大脑-小脑-肢体”技术架构图
要让机器人“会思考”,必须为其构建一个强大的知识基座。这个基座并非简单地将大模型接入机器人,而是需要解决大模型在工业场景中的“幻觉”问题和专业知识匮乏问题。
1. 基于RAG的知识增强:
检索增强生成(RAG)是目前解决该问题的有效技术路径。传统的RAG将用户查询与向量数据库中的文档片段匹配,然后输入大模型生成答案。但在工业运维场景下,设备维修手册、操作规程、故障案例等文档具有高度的结构化和关联性。因此,一种RAG+微图谱的层次化检索方法被提出。其核心流程如下:
- 数据解析层:通过智能文档处理平台,将非结构化的PDF、CAD图纸、工单等数据解析为可计算的结构化信息。
- 知识构建层:在全局向量知识库之上,构建一个“微图谱”,用以显式关联文档章节之间的逻辑关系(如“故障现象A -> 原因B -> 解决方案C”)。
- 检索与生成层:当机器人遇到问题时,首先通过微图谱进行精确定位和路径导航,再通过向量库进行宽泛知识召回。两者结果融合后输入大模型,生成带有溯源循证的可信答案。
2. 知识图谱作为结构化知识中心:
对于更复杂的决策任务,如电力系统的停电事件研判或多设备故障根因分析,单纯的RAG仍显不足。知识图谱,特别是时序知识图谱和事理知识图谱,在此扮演了核心角色。
- 时序知识图谱:将时间维度嵌入知识表示,能够建模设备状态随时间演变的规律。例如,一个断路器的“分合闸次数”与“触头磨损程度”之间的时序关系。
- 事理知识图谱:重点刻画事件之间的因果、顺承、条件等逻辑关系。例如,“雷击”导致“线路过流”,进而触发“保护装置动作”,最终导致“停电”。
通过将设备运行日志、气象数据等实时信息流注入事理图谱,系统可以进行多跳逻辑推理,自动生成从现象到根因的可视化推理链路,而非仅提供一个黑箱式的结论。这与QCA研究中揭示的复杂因果机制不谋而合,即技术要素(知识图谱)与组织能力(运维流程)协同,才能有效解决复杂问题。
三、场景聚焦:工业运维从“人工”走向“自主化”

图2:电力智能运维场景中“机器人大脑”工作流程图
国家电网68亿元的采购规划,清晰地指明了具身智能在工业领域最紧迫的应用场景之一——自主化运维。这背后的技术逻辑是,工业运维正在从“提升人效”走向“机器代人”。
传统人工运维模式的瓶颈在于:知识依赖个人经验,故障排查耗时久,且在高危环境下存在安全风险。“数字智能”辅助模式(如手持PDA查询)虽然解决了信息获取问题,但“分析”与“动手”仍是分离的。
具身智能的部署态模式则将“会思考的大脑”与“会跑的肢体”统一。其工作流可以描述为:
- 自主巡检:人形机器人按照预设路线或在复杂地形中自主导航至指定设备。
- 多模态感知:通过视觉(表计读数、外观异常)、听觉(异响)、红外(温度异常)等多模态传感器采集设备状态。
- 边缘侧推理:在机器人端侧,利用轻量化模型进行初步筛查。对于复杂问题,则通过5G/工业网联上传至云端“机器人大脑”。
- 云端知识推理:云端知识中心结合知识图谱和RAG,对故障现象进行根因分析。
- 例如,对于“变压器油温过高”的现象,系统会在事理图谱中追溯可能的原因路径:“负荷突增”或“冷却器故障”或“内部短路”。每一条路径都会关联相应的历史维修案例和操作规程。
- 推理过程生成可审计的决策树,明确每一步判断的依据和来源。
- 自主作业与协同:对于已验证的、低风险的故障(如清理异物、复位开关),机器人可直接执行操作。对于复杂操作(如更换部件),则由机器人作为“远程专家”的视听载体,专家通过数字孪生界面进行遥操作指导,实现高效人机协同。
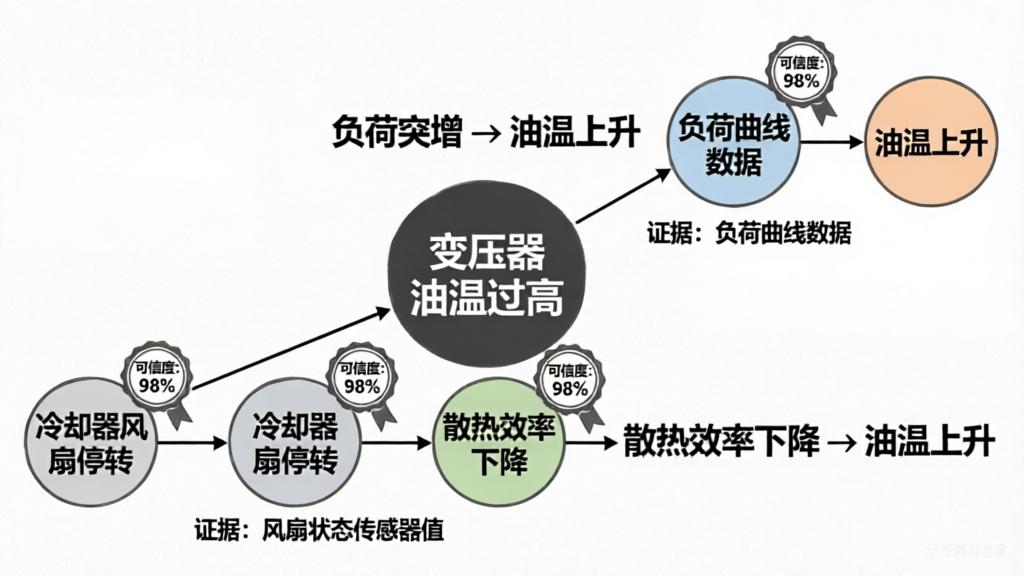
图3:基于知识图谱的故障根因分析推理链路示意图
四、行业趋势研判:部署态元年的三大支柱
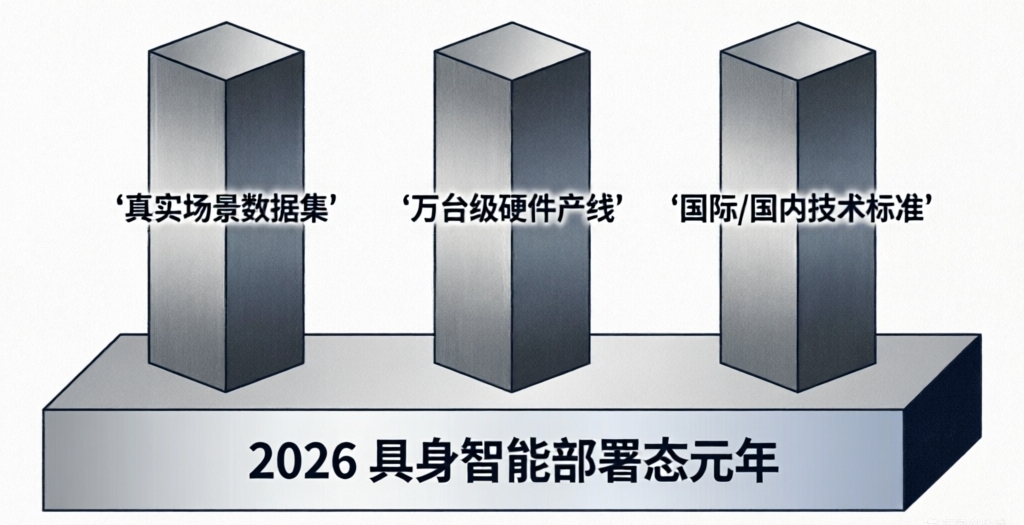
图4:具身智能部署态三大支柱模型(数据、硬件、标准)
2026年被定义为“部署态”元年,其支撑并非单一的技术突破,而是由数据、硬件、标准三个要素的协同成熟所驱动。
1. 数据: 智元机器人开源的AGIBOT WORLD 2026数据集,覆盖了家居、餐饮、工业等多个真实场景的长周期、多模态数据。高质量、大规模的真实场景数据,是算法模型从“仿真秀”走向“真功夫”的燃料。正如TOE框架中所强调的,数字知识存量(在此表现为具身数据集)是技术融合与创新的基础。
2. 硬件: 宣布建设两条万台级产线并启动年产能10万台智能制造基地,标志着人形机器人正在摆脱“实验室手工作坊”的模式,开始利用成熟的3C、汽车制造供应链,进入规模化量产阶段。这直接回应了成本和应用普及的产业难题。
3. 标准: ISO首项《人形机器人数据集》国际标准的成功立项,意味着行业将从“各自为战”走向“车同轨、书同文”。标准的建立将极大地降低数据采集和算法评估的重复成本,加速技术在不同平台间的复用和生态的建立。这与政策支持在技术采纳初期降低不确定性、明确创新方向的作用完全一致。
这三个支柱的完善,使得AI正式从“屏幕里的数字智能”进入“物理空间的具身智能”。对于工业领域而言,这意味着AI从一个对话工具、一个分析工具,进化为了一个能够真正“动手干活”的智能伙伴。
③ 专家观点 / 政策建议 / 反向思考
技术发展的辩证视角:标准化与创新性的博弈
尽管部署态元年的图景令人振奋,但仍需保持理性务实的态度。
首先,当前大模型驱动的具身智能,其“实体世界模型”尚处于早期阶段。在开放、非结构化的极端环境下,机器人的鲁棒性仍远逊于人类。学术界对此已有清醒认识,即过度聚焦单一技术领域可能导致路径依赖和知识锁定。因此,在推动大模型技术应用的同时,仍需保留对传统基于物理模型的控制方法(如MPC)的研究投入,形成混合智能架构,以防止技术路线单一化带来的风险。
其次,成本结构是规模化部署的现实瓶颈。人形机器人的制造成本中,高性能电机、减速器、传感器等核心零部件占比极高。当前国产化替代虽有进展,但与国际先进水平仍有差距。政府补助和产业政策在此时扮演“锦上添花”甚至“雪中送炭”的角色,但企业的核心竞争力,最终仍取决于能否通过技术创新构建内生创新驱动的良性循环,降低对持续性外部支持的依赖。
④ 结语与展望
2026年已然成为具身智能发展的分水岭。人形机器人半马赛事直观地展示了“会跑”的AI已具备初步的实用价值;而国家电网的大规模采购规划,则正式开启了“会思考”的AI在工业运维场景的商业化大门。
具身智能的“部署态”元年,意味着技术价值的评判标准,正从“论文引用数”和“展会关注度”,转向“产线交付量”、“故障解决率”和“投资回报率”。人和机器人的协作而非简单替代,成为未来十年最具确定性的技术趋势之一。
展望未来,随着“机器人大脑”的知识基座(知识图谱+RAG)与“肢体”的运动控制能力持续融合,一个由生物智能与数字智能共同驱动的工业新时代正在加速到来。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 12
12 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)