数字孪生实战:5分钟实现MyCobot280机械臂虚实同步
·
在智能制造场景中,机械臂的虚实同步是数字孪生落地的经典需求。今天,我们就以MyCobot280为例,手把手教大家如何在CIMPro孪大师中完成实体机械臂与孪生场景的实时映射。
整个流程无需复杂编程,只需简单配置 + Python客户端运行,即可让虚拟机械臂跟随实体一起运动。
本教程将实现以下效果:
-
通过Python客户端连接MyCobot280机械臂,获取其实时位姿数据
-
客户端将数据发送至CIMPro孪大师内置的IoT服务器
-
孪生场景中的3D机械臂模型同步做出相同动作,实现虚实完全一致
整个过程对业务人员极度友好,CIMPro孪大师的低代码特性让你无需关心底层渲染与网络通信,专注于业务逻辑本身。
IOT客户端部署教程 for MyCobot280
功能概述
-
该客户端用于连接MyCobot280机械臂,实现对机器人的控制和数据获取,同时与PICIMOS数字孪生服务器同步数据,达到虚拟场景中的机械臂与实体机械臂同步的效果 
机械臂配置

-
该脚本适配的机械臂型号是MyCobot280,对于其中的任一系列都可使用 -
mycobot文档:https://www.elephantrobotics.com/support/ -
机械臂安装、固件烧录请参考文档具体内容 -
-
以MyCobot280-M5为例 -
组装说明:https://docs.elephantrobotics.com/docs/mycobot_280_m5_cn/2-BasicSettings/4.FirstTimeInstallation/4-FirstTimeInstallation.html -
固件烧录:https://docs.elephantrobotics.com/docs/mycobot_280_m5_cn/3-FunctionsAndApplications/5.BasicFunction/ -
串口驱动下载(仅MyCobot280-M5):https://docs.elephantrobotics.com/docs/mycobot_280_m5_cn/3-FunctionsAndApplications/5.BasicFunction/5.2-Softwarelnstructions/
-
参数配置
-
用记事本打开config.json文件,可以进行自定义设置
-
打开之后会看到如下参数,接下来是部分参数的配置教程,其他参数均为调试使用,可以保持默认 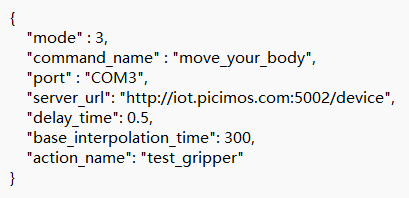
串口配置
-
将MyCobot280-M5连接到计算机的USB端口 -
桌面此电脑 ->(右键,显示更多选项)管理 -> 设备管理器 -> 端口(COMx),找到对应的COM端口,记录下端口号,例如COM3
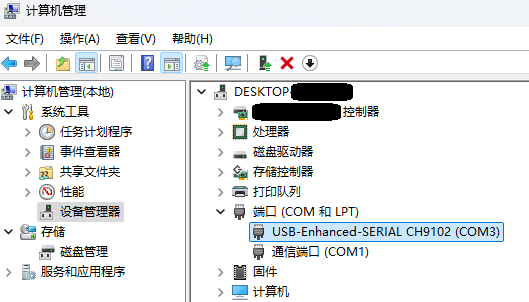
如未检测到设备,请更换USB连接线,如果处于未识别状态,请参考固件烧录教程
-
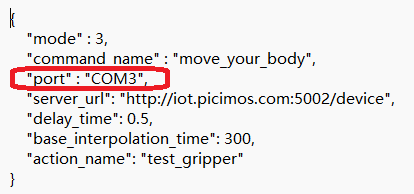
将串口号填入config.json文件中的"port"参数,例如"COM3"
机器人动作配置
-
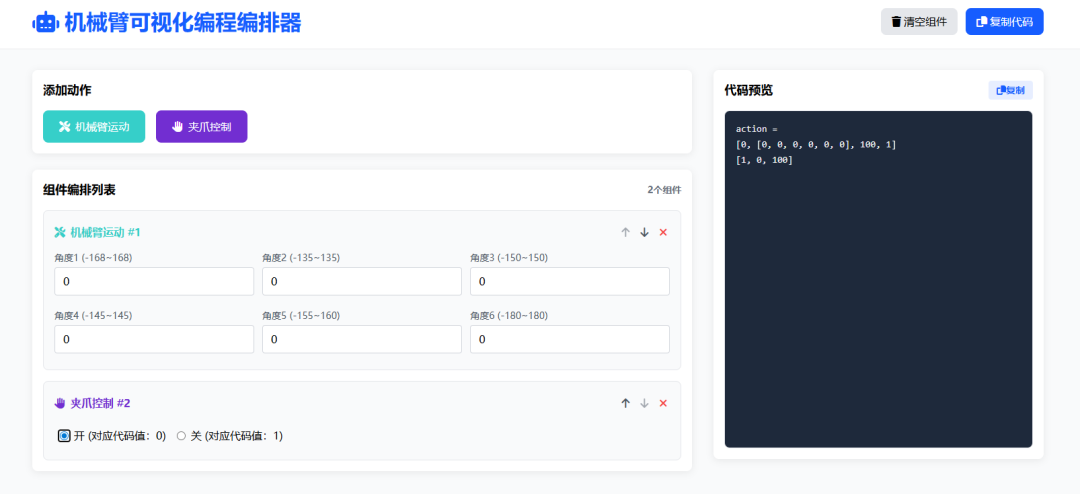
推荐打开可视化工具配置机械臂动作
-
打开后即可自由配置机械臂或末端夹爪的动作,可以自由添加删除动作,调整动作顺序 -
配置完动作后可一键复制右侧转化后的代码
-
打开/mycobot_pose目录,新建文件pose.py(也可以是 自定义名字.py 名称需要是英文) -
在config.json文件中,将"action_name"参数的值设置为新建的.py文件的名称,例如你刚才新建的文件为"test_gripper.py",就填入"test_gripper",两者保持一致即可
Python客户端部署
-
安装Python环境,需要使用Python 3.7及以上版本,网址:https://www.python.org -
打开命令行(win+R,输入cmd),运行以下指令,安装必要的Python库
pip install pymycobot pysignalr
查看IOT服务器状态
-
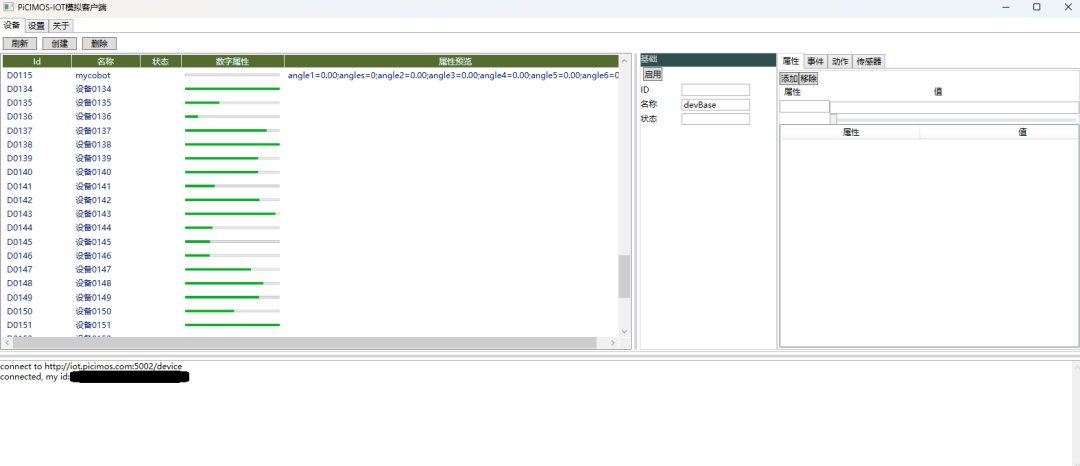
在python客户端文件夹根目录下找到【资源】文件夹,打开PiIOTClient.exe,找到顶部【设置】一栏,输入服务器地址,点击【连接】
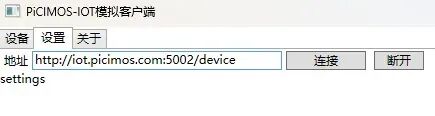
-
PiCIMOS平台提供了一个公网测试环境,地址为http://iot.picimos.com:5002/device
也可以本地网络私有化部署PiIOTServer 有windows单文件exe版本,linux单文件执行程序版本,docker版本可选
-
点击顶部【设备】栏,如果看到物联网设备表格成功渲染,说明步骤正确且服务器运行正常
创建CIMPro孪大师客户端项目
-
打开CIMPro孪大师项目,即可从孪生体中导入机械臂

-
单击机械臂主体,右下方会显示机械臂各个参数
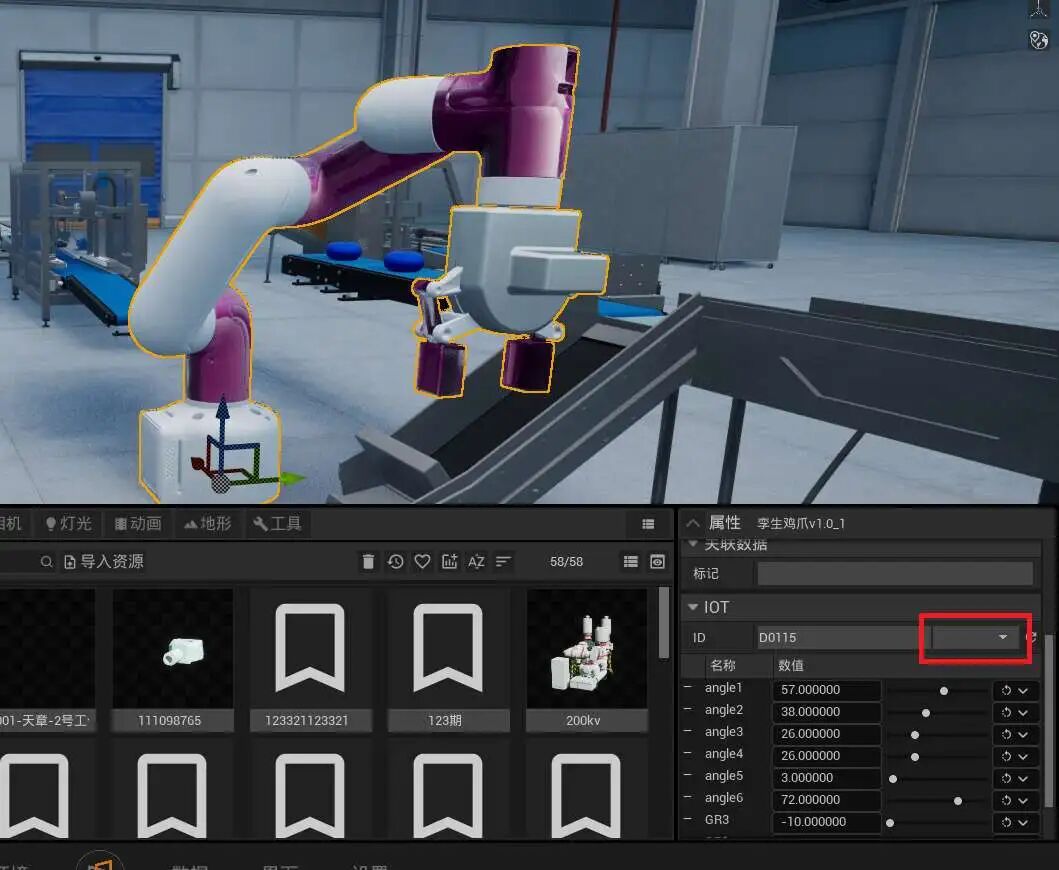
-
打开弹窗,选择115号(默认)即可
python例程运行
运行成功时,机械臂会做一段往返运动,并在CIMPro孪大师项目中实时同步显示机械臂的运动轨迹
-
在资源管理器中打开python客户端文件夹,输入cmd后回车,打开终端,如下图所示
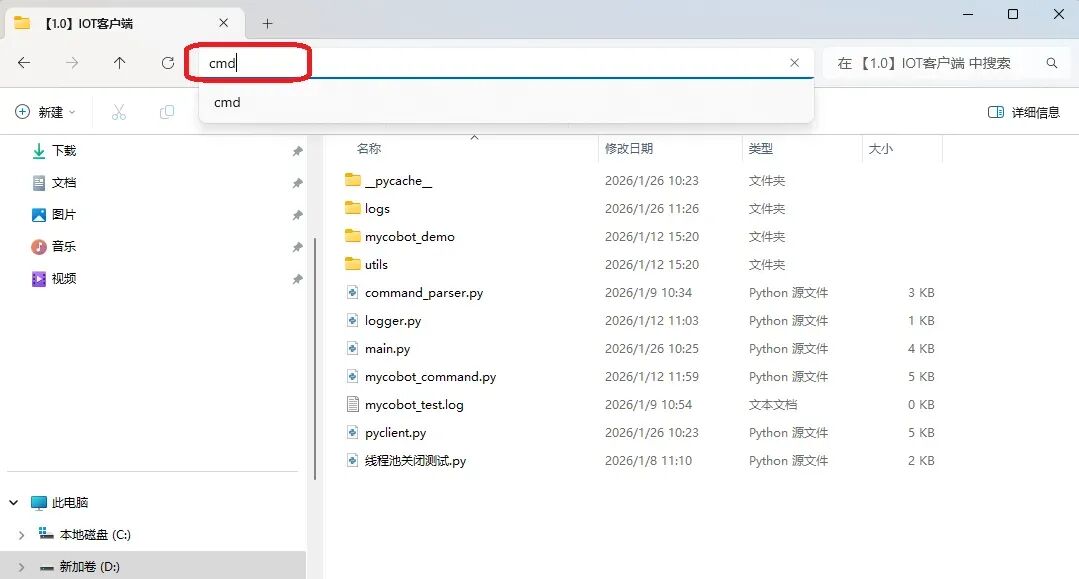
-
依次输入如下指令
python --version
python3 --version

-
显示python版本则成功,如上图,输入带python的指令会显示版本,但输入带python3的指令,输出为空,接下来用带python的指令,运行main.py文件
python main.py
# 或
python3 main.py
-
显示如下结果,恭喜配置圆满成功

通过以上步骤,你已经成功完成了从实体机械臂到CIMPro孪大师数字孪生场景的全链路虚实映射。
这个案例充分体现了CIMPro孪大师的核心价值:
-
零代码绑定:无需编写通信协议、无需处理坐标系转换
-
开箱即用:内置IoT Server,省去第三方中间件采购与集成成本
-
工业级实时性:支持实时数据刷新,满足生产监控要求

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 3
3 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)