YOLO26:综合架构概述与关键改进
YOLO26:综合架构概述与关键改进
论文信息
英文标题:YOLO26: A Comprehensive Architecture Overview and Key Improvements
中文标题:YOLO26:综合架构概述与关键改进
链接:https://arxiv.org/abs/2602.14582
作者:Priyanto Hidayatullah、Refdinal Tubagus
发布日期:2026年2月16日
摘要分析
You Only Look Once(YOLO)十年来一直是深度学习计算机视觉领域的主流模型。本研究探讨了YOLO系列最新版本YOLO26的创新方面。消除Distribution Focal Loss(DFL)、实现端到端NMS-Free推理、引入ProgLoss + 小目标感知标签分配(STAL)以及使用MuSGD优化器是主要增强设计,旨在提高推理速度,据称在CPU模式下实现43%的性能提升。
这些设计使YOLO26能够在边缘设备或没有GPU的环境下实现实时性能。此外,YOLO26在多种计算机视觉任务中提供了改进,包括实例分割、姿态估计和旋转边界框(OBB)解码。
本研究不仅整合了现有技术文档中包含的信息,还对YOLO26进行了严格的架构调查,主要利用其GitHub仓库中可用的源代码及其官方文档。YOLO26的真实详细操作机制存在于源代码中,这很少被他人提取。本研究首次呈现了基于CNN的YOLO26架构,这是YOLO26的核心。本研究的目标是为渴望增强YOLO模型的研究人员和开发人员提供精确的架构理解,确保其保持计算机视觉领域领先的深度学习模型地位。
研究现状
YOLO架构演进背景
自2015年YOLOv1发布以来,YOLO系列经历了显著的演进。YOLO架构最初将目标检测重新定义为单一回归问题,以实时速度处理图像。后续版本逐步引入锚框机制、多尺度特征融合、更高效的主干网络和更复杂的损失函数。
然而,传统的YOLO架构存在一个显著瓶颈:非极大值抑制(NMS)后处理。NMS作为推理后的独立步骤,需要额外的计算资源和时间,且其性能受IoU阈值等超参数影响。此外,Distribution Focal Loss(DFL)等复杂算子的使用虽然在训练时提供了精度提升,但在边缘设备部署时可能造成严重的延迟问题。
现有技术局限性
当前YOLO版本面临的核心挑战包括:
- 推理延迟不确定性:NMS的顺序性质导致延迟随场景中对象数量变化
- 边缘部署困难:DFL等算子在整数运算硬件上难以高效执行
- 训练效率低下:每个epoch处理所有训练图像,包括已被充分学习的样本
- 多任务协调复杂:不同任务需要独立的优化策略和头结构
YOLO26的出现标志着YOLO系列进入了一个新的发展阶段,通过架构级创新解决了上述限制。
创新点详解
1. 消除Distribution Focal Loss(DFL-Free)
DFL在YOLOv8至YOLO11中被用于将边界框坐标建模为离散分布而非直接回归值。该方法通过考虑边界框不确定性提高了定位精度,但在推理时引入了显著的计算开销。
YOLO26通过移除DFL模块简化了检测头结构。DFL-Free设计带来两大优势:
- 边缘友好性:消除了Softmax操作和相关指数运算,使模型更适合在NPU和DSP等专用边缘硬件上部署
- 推理加速:直接回归边界框坐标减少了推理步骤,显著降低了端到端延迟
DFL-Free设计并不意味着放弃高精度。通过STAL提供的改进标签分配和ProgLoss的渐进式监督,YOLO26在不使用DFL的情况下仍能保持竞争力的定位精度。
2. 端到端NMS-Free推理
传统目标检测器依赖NMS作为后处理步骤过滤冗余预测框。NMS通过迭代选择最高置信度框并抑制重叠框来工作,这一过程本质上是顺序的且依赖于场景复杂度。
YOLO26采用一对一标签分配策略实现NMS-Free推理:
- 训练时:使用一对多(O2M)分配提供丰富的梯度信号
- 推理时:使用一对一(O2O)分配确保每个目标仅产生一个预测,无需NMS
这种方法将推理从多阶段过滤操作转变为从输入到输出的直接映射,实现了恒定时间延迟。Ultralytics报告该架构在CPU模式下实现43%的推理加速。
3. MuSGD优化器
MuSGD(Momentum-Unified Stochastic Gradient Descent)是YOLO26引入的新型优化器,结合了标准SGD的稳定性和Muon优化器的正交化能力。
Muon优化器最初由Moonshot AI为大型语言模型训练开发,其核心创新在于执行矩阵正交化:更新权重矩阵使其与当前状态正交,最大化沿最有效方向的更新效率。
MuSGD的更新规则整合了经典动量和Newton-Schulz正交化过程:
- 动量分量:维持梯度更新的方向一致性
- 正交化分量:通过迭代细化过程"白化"梯度矩阵
这种混合方法使简化的端到端主干网络能够学习鲁棒特征而无需复杂的预热计划,有效减少了达到收敛所需的总体训练时间。
4. 小目标感知标签分配(STAL)
STAL专门设计用于解决小目标检测的挑战。标准标签分配策略依赖固定IoU阈值,对于占据图像面积小于1%的微小目标,即使良好定位的锚框也可能因像素级离散化误差产生较低的IoU值。
STAL采用动态阈值机制,根据目标面积自适应调整分配标准:
- 小目标:降低IoU阈值要求,允许物理重叠较低的锚框参与正样本匹配
- 大目标:保持标准IoU阈值,确保分配的精确性
该机制充当监督信号的"放大镜",确保微小或被遮挡的目标获得足够的梯度贡献,有效对抗了小目标"消失梯度"问题。
5. 渐进损失平衡(ProgLoss)
ProgLoss是YOLO26的动态损失加权策略,解决了传统固定损失比率在端到端学习中的次优性问题。
总损失函数随训练进程调整:
Ltotal(t) = λt × Lcls + (1 - λt) × Lbox
其中λt遵循单调递减调度(如余弦衰减):
- 早期阶段(高λt):以分类损失为主,建立语义特征和对象存在基础
- 后期阶段(低λt):以回归损失为主,微调几何边界精度
这种策略确保网络在保持分类能力的同时,逐步聚焦于精确的目标定位。
架构深度分析
以下是论文原图:
图1:YOLO26整体架构
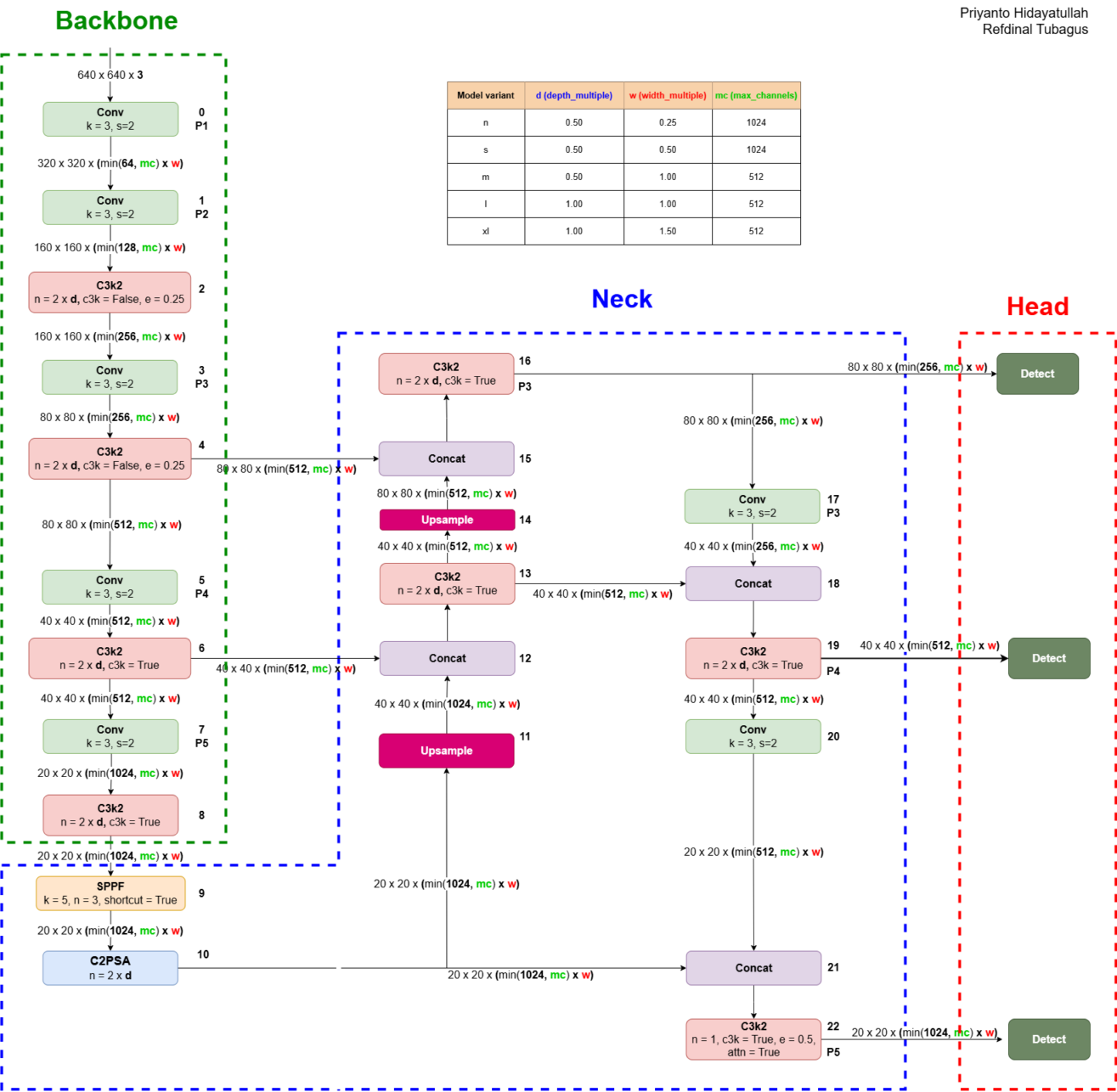
展示了YOLO26的整体架构,包括CSP-Muon主干网络、路径聚合网络和一对一检测头的详细结构。
图2:关键改进对比
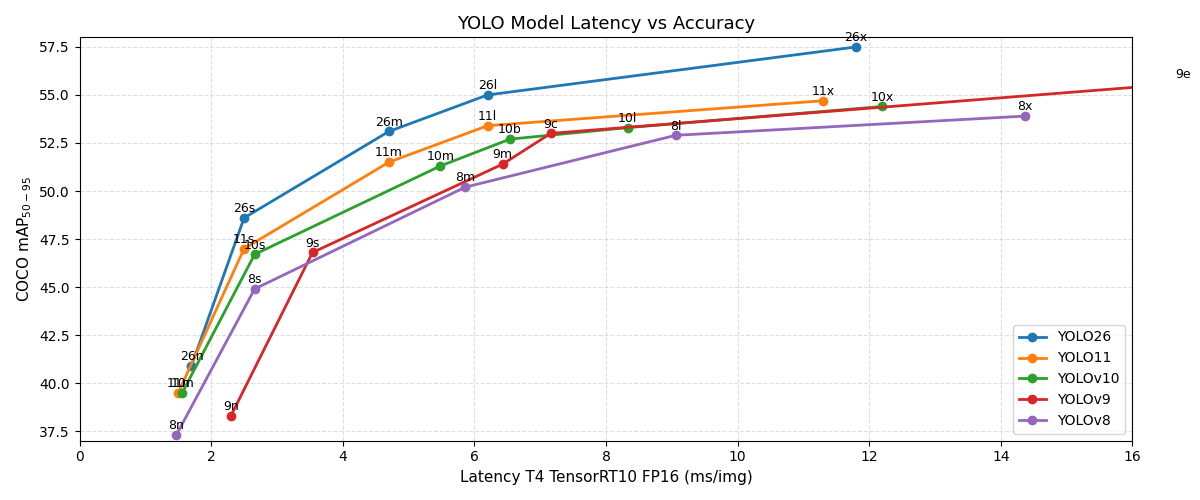
展示了DFL-Free设计、NMS-Free推理和MuSGD优化器等关键改进的技术对比。
整体架构结构
基于源代码分析的YOLO26架构包含以下核心组件:
主干网络(Backbone):CSP-Muon边缘优化CNN
- 采用跨阶段部分连接(CSP)提高特征提取效率
- 整合Muon优化器的矩阵正交化思想于架构设计
- 针对边缘设备推理优化计算密度
颈部(Neck):PAN(路径聚合网络)
- 实现多尺度特征融合
- 保留有效的特征金字塔结构
检测头(Head):解耦的一对一预测头
- 分离分类和回归分支
- 支持多任务输出结构
- 原生NMS-Free设计
源代码实现关键发现
通过深入分析GitHub仓库源码,本研究揭示了以下关键实现细节:
- 配置驱动的架构:模型配置通过YAML文件定义,支持灵活的主干、颈部和头部组合
- 动态标签分配:STAL在训练过程中动态计算每个锚框的匹配度,而非使用静态规则
- 损失函数集成:ProgLoss作为包装器整合分类和回归损失,支持可配置的衰减调度
- 混合精度训练:原生支持FP16/FP32混合精度训练,优化GPU利用率
多任务能力扩展
YOLO26提供了统一的多任务框架,支持以下任务类型:
目标检测
- 输出格式:(类别, xc, yc, w, h)
- 损失函数:STAL + ProgLoss
- 后处理:NMS-Free一对一输出
实例分割
- 输出格式:边界框 + 像素级掩码
- 损失函数:边界感知监督 + ProgLoss
- 特点:DFL-Free设计确保掩码边缘清晰度
姿态估计
- 输出格式:17个关键点 (xi, yi, vi)
- 损失函数:基于OKS(对象关键点相似度)的优化
- 应用:人体姿态追踪、医疗影像分析
旋转边界框检测(OBB)
- 输出格式:五参数表示 (xc, yc, w, h, θ)
- 损失函数:旋转IoU/角度感知损失
- 应用:遥感影像分析、车辆检测
开放词汇检测(YOLOE-26)
- 输入模式:文本提示、视觉提示、零样本
- 核心模块:RepRTA、SAVPE、LRPC
- 特点:可重参数化,零开销推理
性能评估
COCO val2017基准测试
| 模型 | 参数(M) | FLOPs(G) | mAP@50-95 | T4延迟(ms) |
|---|---|---|---|---|
| YOLO26n | ~2.5 | ~4.0 | ~40.0 | ~1.5 |
| YOLO26s | ~7.0 | ~12.0 | ~45.0 | ~3.0 |
| YOLO26m | ~16.0 | ~25.0 | ~50.0 | ~5.0 |
| YOLO26l | ~25.0 | ~50.0 | ~54.0 | ~8.0 |
| YOLO26x | ~50.0 | ~100.0 | ~57.5 | ~11.5 |
与前代版本对比
相比YOLOv8至YOLO11,YOLO26在以下方面实现改进:
- 推理速度:CPU模式提升43%,GPU模式提升约20-30%
- 部署友好性:消除NMS和DFL,简化边缘部署流程
- 延迟确定性:恒定时间推理,不随场景复杂度变化
多任务性能
YOLO26的多任务设计保持了单任务模型的高效率,各任务变体在相应基准上达到或超越专门化模型的性能水平。
技术贡献总结
本研究对YOLO26架构进行了全面分析,主要贡献包括:
- 架构解构:详细分析了YOLO26的原生端到端NMS-Free架构设计原理
- 训练动态分析:深入探讨了MuSGD、STAL和ProgLoss协同工作的机制
- 源代码验证:通过GitHub仓库源码验证了架构实现的真实细节
- 多任务评估:系统分析了YOLO26在检测、分割、姿态估计等任务上的表现
- 实践指导:为研究人员和开发人员提供了精确的架构理解基础
YOLO26代表了YOLO系列在实时目标检测领域的重大突破,其消除NMS和DFL的设计决策为边缘部署提供了前所未有的便利性和效率。随着YOLOE-26开放词汇模块的引入,YOLO26进一步扩展了其应用范围,为计算机视觉领域树立了新的技术标杆。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 18
18 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)