[具身智能-421]:如何获得机器人STL 3D模型文件?
·
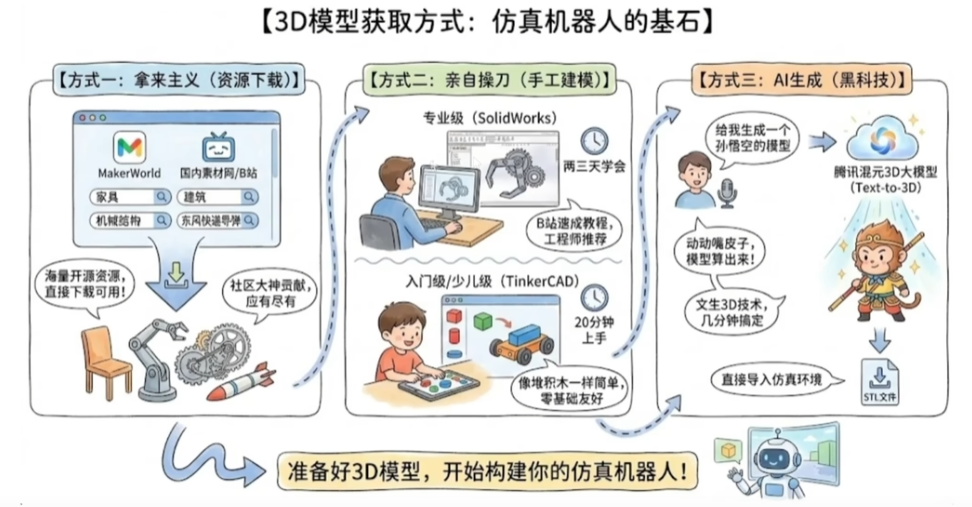
获取机器人 STL 模型文件主要有三条路径:“直接下载开源项目”、“自行设计建模”以及“逆向工程”。
考虑到你正在搭建 Node.js 仿真软件,最推荐的方式是寻找成熟的开源机器人项目,因为它们的 STL 文件通常已经和 URDF 文件配套好了,能帮你省去大量的坐标对齐工作。
以下是具体的获取渠道和建议:
📥 1. 下载开源机器人项目 (最推荐)
这是最快获得高质量、且与 URDF 完美匹配的 STL 文件的方法。很多教育级或科研级机器人都会开源其机械设计文件。
-
GitHub / GitLab
- 搜索技巧:使用关键词组合搜索,如
robot description、urdf mesh、3d printed robot、stl。 - 推荐项目:
- Niryo One / Niryo Ned:非常经典的 6 轴机械臂,GitHub 上有完整的 STL 和 URDF 文件。
- Stanford Pupper / MIT Mini Cheetah:四足机器狗,网上有大量的开源复刻版本和 STL 资源。
- XLeRobot:包含双臂移动机器人的 STL 文件,适合家庭服务机器人仿真。
- Unitree (宇树科技):部分开源了 Go1 或 A1 的 URDF,虽然官方不一定直接提供 STL,但社区(如 GitHub)常有开发者根据 URDF 重建或提取的 Mesh 文件。
- 搜索技巧:使用关键词组合搜索,如
-
ROS 官方仓库
- 很多工业机器人的 ROS 驱动包(如
universal_robot、fanuc、kuka_experimental)中,meshes文件夹下通常包含.stl或.dae文件。你可以直接从这些 ROS 包中提取出来。
- 很多工业机器人的 ROS 驱动包(如
🗂️ 2. 3D 模型分享社区 (适合零部件或通用结构)
如果你需要特定的机器人部件(如机械爪、轮子、传感器支架)或者想自己组装一个机器人,可以去这些网站:
- Thingiverse & Printables:
- 全球最大的 3D 打印社区。搜索 "Robot Arm", "Hexapod", "Rover Chassis" 等关键词。
- 优点:完全免费,很多设计师会上传整个机器人套件。
- GrabCAD:
- 优点:这里更多是工程师上传的专业 CAD 模型(SolidWorks, STEP 格式)。
- 注意:虽然它主要提供 STEP 文件,但你可以下载后用软件转为 STL。这里的模型精度通常比 Thingiverse 高很多。
- Cults3D & MyMiniFactory:
- 包含很多设计感强的模型,部分高质量模型可能需要付费。
🛠️ 3. 自行设计与转换 (定制化)
如果你需要独一无二的机器人,或者需要将现有的工业 CAD 模型用于仿真:
-
使用 CAD 软件导出
- 软件:SolidWorks, Fusion 360, Creo, Onshape, Blender。
- 流程:设计好机器人 -> 选中所有零件 -> 另存为/导出 -> 选择 STL (.stl)。
- 关键设置:
- 单位:确保导出时单位设置为 Meters (米),因为 URDF/Gazebo/Three.js 的标准单位是米。如果 CAD 里是毫米画的,导出时要缩放 0.001 倍,或者在 URDF 的
<mesh>标签里设置scale="0.001 0.001 0.001"。 - 分辨率:选择“精细”或“高”,避免模型棱角分明。
- 单位:确保导出时单位设置为 Meters (米),因为 URDF/Gazebo/Three.js 的标准单位是米。如果 CAD 里是毫米画的,导出时要缩放 0.001 倍,或者在 URDF 的
-
STEP 转 STL
- 如果你只有 STEP 文件(工业标准格式),可以使用 FreeCAD(免费开源)或在线转换工具将其转换为 STL。
🤖 4. AI 生成与逆向 (进阶)
- AI 生成:目前有一些 AI 工具(如 Meshy, CSM)可以通过文字或图片生成 3D 模型,但目前生成的模型拓扑结构较差,不太适合用于需要精确运动学的机器人仿真,仅适合做背景装饰。
- 点云重建:如果你有实物机器人,可以使用 LiDAR 或 RGB-D 相机(如 RealSense)扫描实物,生成点云,然后通过软件(如 CloudCompare, MeshLab)重建为 STL 模型。
💡 避坑指南:仿真专用的 STL 建议
为了让你在 Node.js 仿真中获得更好的体验,请注意以下几点:
- 文件名规范:STL 文件名最好使用小写字母和下划线(如
link_1.stl),避免使用中文或空格,防止在 Linux 服务器或 Web 路径加载时出错。 - 视觉与碰撞分离:
- 视觉 STL:可以复杂、精细,用于 Three.js 渲染。
- 碰撞 STL:必须简单!尽量用长方体或圆柱体代替复杂的 STL 进行物理计算,否则你的仿真软件会非常卡顿。
- 检查法线:下载或导出后,用查看器检查一下法线是否朝外。如果法线反了,模型在 Three.js 里可能会看起来是“空心”的(只能从里面看到,外面看不见)。
总结建议:先去 GitHub 搜你感兴趣的机器人型号 + "URDF" 或 "Description",这是获取成套、可用 STL 文件的最快路径。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献171条内容
已为社区贡献171条内容

所有评论(0)