【matlab代码介绍】轨迹漂移时,利用终点位置的轨迹校正,matlab例程,可用于降低惯导漂移带来的误差,适用于三维空间
代码用于模拟和校正三维惯性导航系统(INS)的轨迹漂移。通过线性分配终点误差,实现对累积漂移的补偿。为INS漂移提供一个非滤波的思路。
背景
算法原理
本代码针对惯性导航系统(INS)累积误差导致的三维轨迹漂移问题,提出基于终点误差线性分配的校正方法。其核心思想是通过起点与终点的真实位置偏差,动态生成全局补偿矩阵,实现系统性误差的时空关联修正。
漂移误差建模
-
速度层噪声:
Δ v ( t ) = ∑ k = 1 n η v ( k ) ⋅ Δ t , η v ∼ N ( 0 , σ v 2 ) \Delta v(t) = \sum_{k=1}^n \eta_v(k) \cdot \sqrt{\Delta t}, \quad \eta_v \sim \mathcal{N}(0, \sigma_v^2) Δv(t)=k=1∑nηv(k)⋅Δt,ηv∼N(0,σv2)
式中 σ v = 0.005 \sigma_v=0.005 σv=0.005为速度噪声强度(代码第23行),模拟随机游走过程。 -
位移层噪声:
Δ p ( t ) = ∫ 0 t Δ v ( τ ) d τ = ∑ k = 1 n Δ v ( k ) ⋅ Δ t \Delta p(t) = \int_0^t \Delta v(\tau) d\tau = \sum_{k=1}^n \Delta v(k) \cdot \Delta t Δp(t)=∫0tΔv(τ)dτ=k=1∑nΔv(k)⋅Δt
对应代码中的cumsum双重积分操作(第24行),符合布朗运动模型。
终点校正策略
-
闭合差计算:
δ = p true_end − p drift_end = [ Δ x , Δ y , Δ z ] T \delta = \mathbf{p}_{\text{true\_end}} - \mathbf{p}_{\text{drift\_end}} = [\Delta x, \Delta y, \Delta z]^T δ=ptrue_end−pdrift_end=[Δx,Δy,Δz]T
计算真实终点与漂移终点的矢量偏差(代码第29行)。 -
线性分配校正:
C correction = δ ⊗ w , w i = i − 1 n − 1 \mathbf{C}_{\text{correction}} = \delta \otimes \mathbf{w}, \quad w_i = \frac{i-1}{n-1} Ccorrection=δ⊗w,wi=n−1i−1
通过时间权重向量(\mathbf{w})将全局误差分配到各轨迹点,校正后轨迹为:
P corrected = P drift + C correction \mathbf{P}_{\text{corrected}} = \mathbf{P}_{\text{drift}} + \mathbf{C}_{\text{correction}} Pcorrected=Pdrift+Ccorrection
该操作时间复杂度为 O ( n ) O(n) O(n),适用于实时处理
关键代码模块解析
-
轨迹仿真模块
- 生成理想轨迹:
true_position = cumsum(true_velocity .* t) - 添加双重积分噪声:
ins_position = true_position + noise_drift_pos
- 生成理想轨迹:
-
校正核心模块
- 计算校正矩阵:
correction_matrix = delta * correction_factors - 应用校正:
corrected_position = ins_position + correction_matrix
- 计算校正矩阵:
-
可视化模块
- 三维轨迹对比:
plot3绘制漂移/校正/真实轨迹 - 误差曲线:分轴显示校正前后误差绝对值分布
- 三维轨迹对比:
扩展方向
- 动态权重优化:替换线性分配为指数函数 w i = 1 1 + e − λ t w_i = \frac{1}{1 + e^{-\lambda t}} wi=1+e−λt1,适应非均匀漂移
- 多传感器融合:结合GNSS观测值构建紧耦合校正模型
- 非线性补偿:引入B样条曲线拟合真实轨迹,抑制高频噪声
运行结果
三维轨迹对比: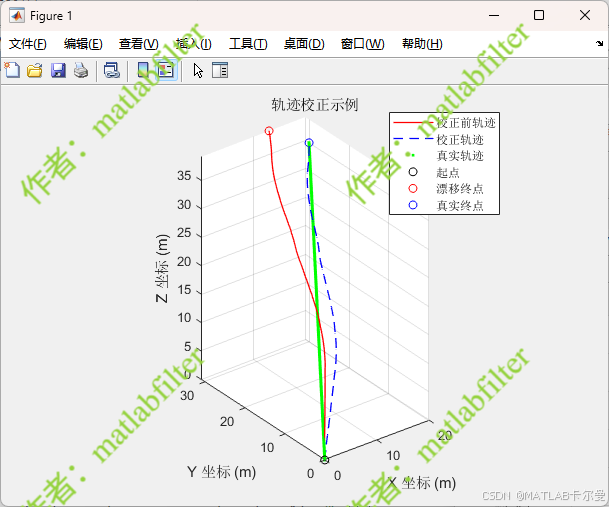
距离误差曲线: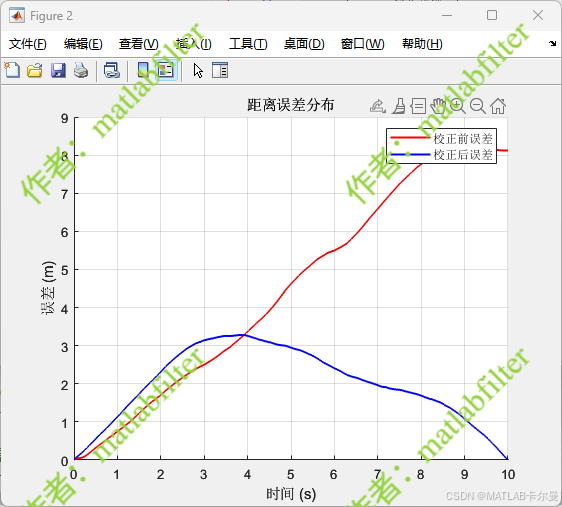
各轴误差对比:
MATLAB代码
程序结构:
部分代码:
% 轨迹漂移的终点校正例程,适用于三维的情况
% 2025-06-24/Ver1
clear; clc; close all;
rng(0); % 固定随机数种子,便于复现
% 轨迹点数量
n = 200; % 轨迹点数量
t = linspace(0, 10, n); % 时间序列
% 模拟 INS 解算的轨迹 (包含漂移)
true_velocity = [2; 1; 0.5]; % 真实速度向量 (m/s)
%% INS 模拟:积分得到位置 + 漂移噪声
true_position = cumsum(true_velocity .* t); % 理想轨迹(无漂移)
noise_drift_vel = cumsum(0.005 * randn(3, n), 2); % 速度层面的累积漂移(随机游走)
noise_drift_pos = cumsum(noise_drift_vel,2); %位移层面的累积漂移
ins_position = true_position + noise_drift_pos; % 加入漂移后的轨迹
%% 已知的起点和真实终点
start_point = ins_position(:, 1); % 起点
true_end_point = true_position(:, end); % 真实终点
drift_end_point = ins_position(:, end); % 漂移后的终点
% 漂移矢量计算
delta = true_end_point - drift_end_point;
%% 校正轨迹
% 误差统计
% 校正前误差
%% 校正后误差计算
% 打印误差统计结果
%% 可视化轨迹
% 绘制误差分布
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 11
11 0
0- 0



 已为社区贡献35条内容
已为社区贡献35条内容

所有评论(0)