相机软件开发常问业务相关面试题
3A工作原理
AF(Auto Focus)
AE(Auto Exposure)
问题:sensor的曝光时间和gain是N+1帧生效,d gain是N+1帧才生效,这个驱动是怎么做同步的?
一、为什么曝光和 Gain 要"隔帧生效"?
这是 CMOS 传感器的硬件流水线决定的,不是驱动的特殊设计:
| 阶段 | 描述 |
|---|---|
| 曝光阶段 | 像素在某帧的行消隐期开始积分(充电) |
| 读出阶段 | 积分完成后,行数据逐行被读出到模拟前端 |
| 寄存器锁存 | 大多数 sensor 在 VSYNC 上升沿 将影子寄存器(shadow register)锁存到工作寄存器 |
所以,你在 Frame N 期间通过 I2C 写入的值,要到 Frame N+1 的 VSYNC 才会被 latch(锁存),进而在 N+1 帧曝光时生效。这是曝光时间(ET)和 Analog Gain(AG)的典型 1 帧延迟。
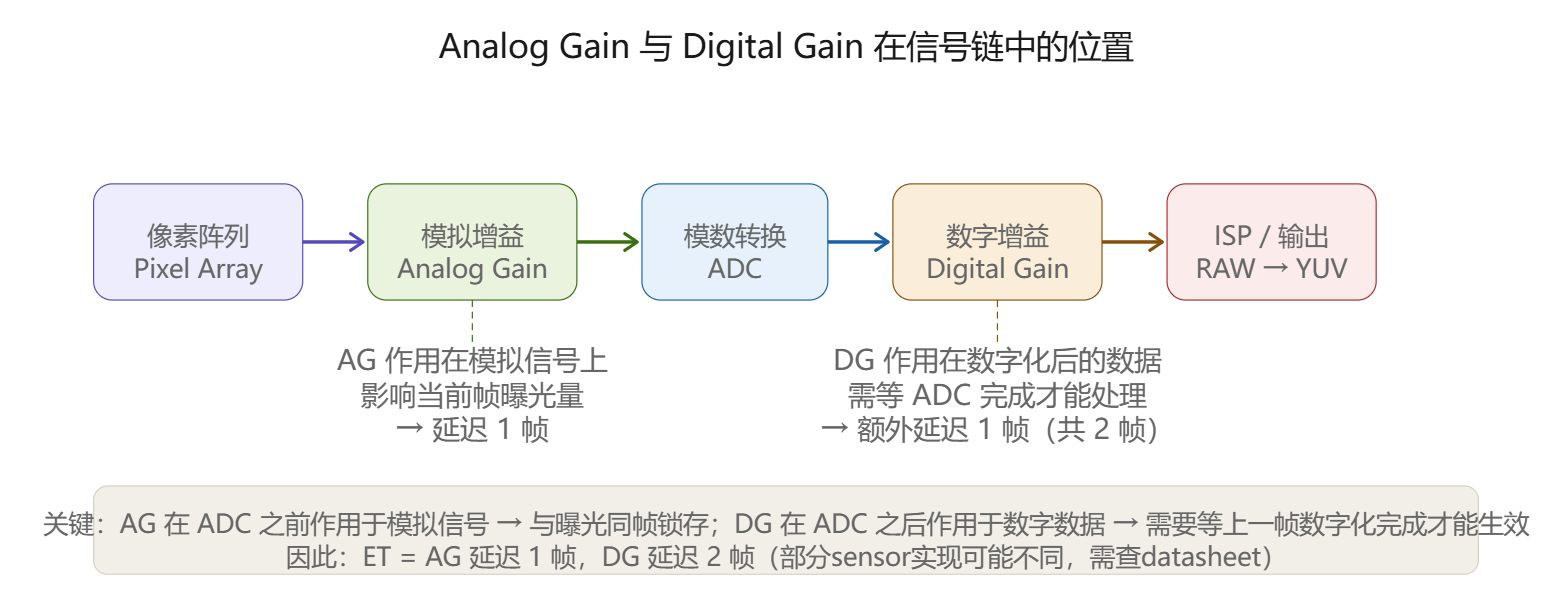
二、A Gain 和 D Gain 为什么延迟不一样?
这是问题的核心。用一张流水线结构图来说明:
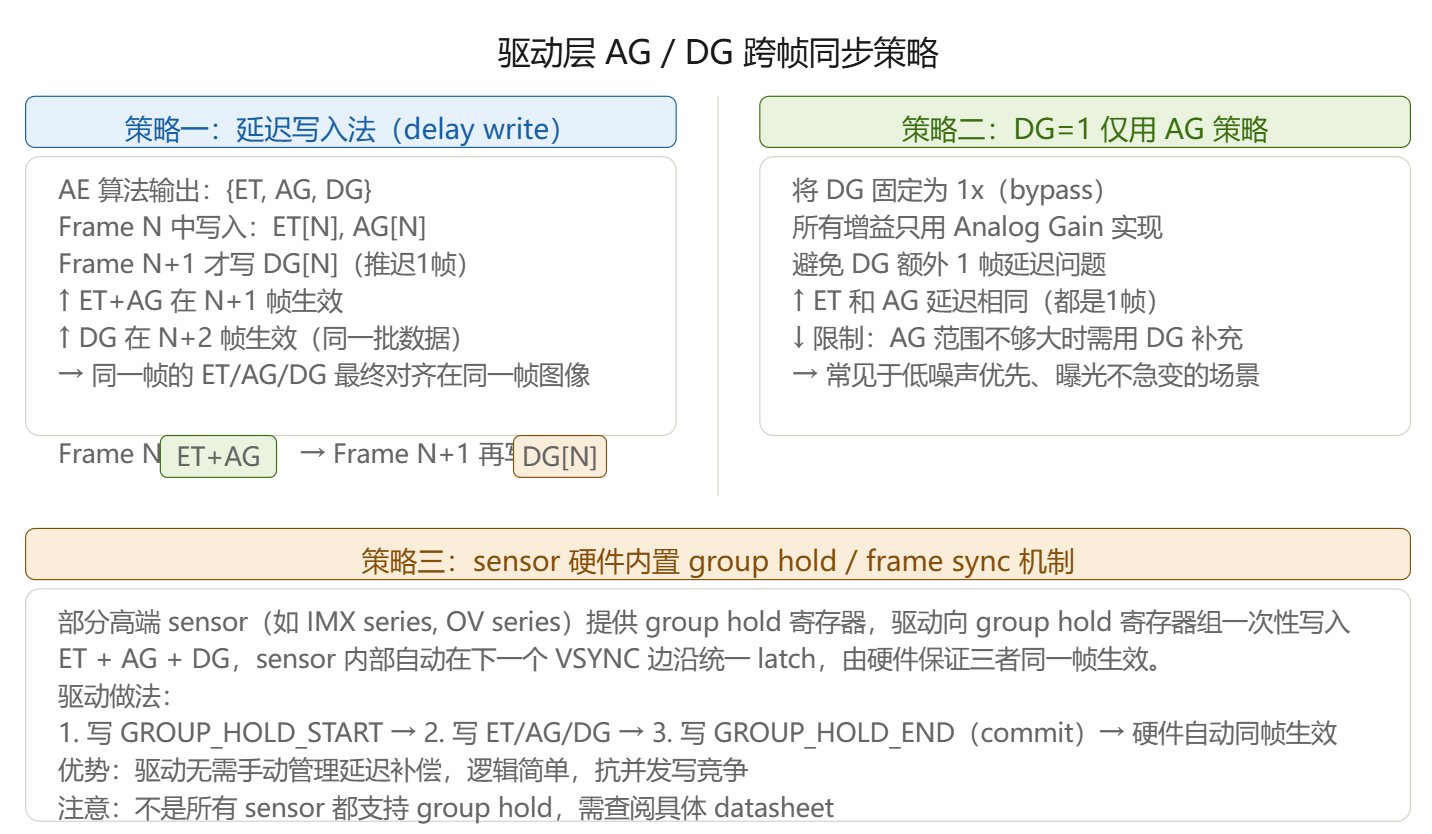
三、驱动层怎么做 AG/DG 同步?
由于 ET+AG 延迟 1 帧,DG 延迟 2 帧,如果 3 个值直接对应同一帧的 AE 计算结果一起写,输出图像亮度会出现 1 帧的"闪烁"或"震荡"(DG 提前生效,但 ET+AG 还没生效)。驱动有两种主流处理策略:
四、驱动代码层面的具体实现
在 Linux/Android Camera HAL 驱动框架(V4L2 / Qualcomm、MTK 等平台)中,同步逻辑通常这样实现:
/* 典型的 sensor 驱动曝光/gain 写入逻辑(伪代码) */
struct sensor_exp_param {
u32 coarse_int_time; // 曝光时间(行数)
u32 analog_gain; // AG 寄存器值
u32 digital_gain; // DG 寄存器值
u32 frame_id; // 本次 AE 结果对应的 frame id
};
/* 驱动维护一个延迟队列 */
struct sensor_exp_param g_pending_params[3]; // 至少 2 帧缓冲
/* VSYNC 中断回调 / SOF(Start of Frame)回调 */
void sensor_sof_isr(u32 frame_id)
{
/* --- 策略一:延迟写入 DG --- */
// 1. 本帧(frame_id)写入 ET + AG(1帧后生效)
sensor_write_reg(ET_REG, g_pending_params[frame_id % 2].coarse_int_time);
sensor_write_reg(AG_REG, g_pending_params[frame_id % 2].analog_gain);
// 2. 写入上一帧的 DG(上帧的 DG 本帧+1 才生效,与上帧 ET/AG 对齐)
sensor_write_reg(DG_REG, g_pending_params[(frame_id - 1) % 2].digital_gain);
/* --- 策略三:group hold(如果 sensor 支持)--- */
// sensor_write_reg(GROUP_HOLD_START, 0x01);
// sensor_write_reg(ET_REG, ...);
// sensor_write_reg(AG_REG, ...);
// sensor_write_reg(DG_REG, ...);
// sensor_write_reg(GROUP_HOLD_END, 0x01);
}
关键点:SOF 中断是写入时机的核心。 驱动必须在 VSYNC/SOF 中断触发后、下一行数据读出之前完成 I2C 写入,否则会错过 latch 窗口,延误到下一帧。
五、不同平台/sensor 的差异
| 因素 | 说明 |
|---|---|
| ET/AG 延迟 | 绝大多数 sensor 为 1 帧,少数特殊模式(如 HDR)为 2 帧 |
| DG 延迟 | 通常比 ET/AG 多 1 帧,即 2 帧,但具体看 sensor datasheet |
| Group Hold | Sony IMX、OmniVision OV、Samsung 等主流 sensor 普遍支持 |
| 影子寄存器 | latch 时刻可能是 VSYNC 上升沿或下降沿,也有在帧末 HREF 空闲期 latch 的,需确认 |
| AE 算法补偿 | 高层 AE 算法需知道每个参数的延迟帧数,才能做正确的预测控制(predictor),否则 AE 调节会振荡 |
总结一下:ET 和 AG 通常隔 1 帧生效,DG 通常隔 2 帧生效;驱动的同步处理核心是在 SOF 中断里按帧号管理写入时序,或者利用 sensor 的 group hold 机制由硬件保证原子 latch。
AWB(Auto White Balance)
HDR高动态处理流程
问题:长曝光的帧和短曝光的帧是一行长曝、一行短曝还是一帧长曝、一帧短曝?
MFNR多帧降噪处理流程
问题:MFNR和HDR是不是都是在YUV域的?
不完全是,这是一个很常见的误解。两者处理域各有不同,而且随着算法演进还在变化。
MFNR(多帧降噪)
传统实现:YUV 域
- 早期 MFNR 确实在 YUV 域做帧对齐 + 融合
- 流程:RAW → ISP → YUV → 多帧对齐(ME/MC)→ 加权融合 → 输出
现代主流实现:RAW 域
- 高端手机(Pixel、iPhone、小米等)的 MFNR 已大量转移到 RAW 域
- 原因:RAW 域噪声模型更纯净(泊松 + 高斯),融合前不经过 Demosaic/色调映射等非线性处理,信噪比提升更彻底
- 流程:多帧 RAW → RAW 域对齐 → RAW 域融合 → 一次 ISP → 输出
所以现代 MFNR 更多是 RAW 域,YUV 域 MFNR 属于算力受限时的折中方案。
HDR(高动态范围)
HDR 的情况更复杂,因为它有多种实现路径:
| 实现方式 | 处理域 | 说明 |
|---|---|---|
| 多曝 RAW 融合(Multi-exposure RAW merge) | RAW 域 | 长/短曝 RAW 在进 ISP 前融合,是质量最好的做法 |
| Sensor 内 HDR(SHDR / DOL-HDR) | Sensor 内部 | 同帧内长短曝隔行交织,sensor 内部或 ISP 前端完成融合 |
| 软件 HDR(多张 YUV 融合) | YUV 域 | 低成本方案,质量较差,早期低端机常用 |
| Tone Mapping | YUV / HDR Linear 域 | 严格来说是 HDR → SDR 的映射,通常在 YUV 或 HDR10 线性域 |
ISP pipeline处理流程
BLC(black level compensation):黑电平补偿
RGB Gain:Digital Gain
PPE & PPC(phase point extraction & phase point correction):相位点抽取与补偿
BPC(Bad Pixel Correction):坏点检测与校正
LSC(Lens Shading Correction):镜头阴影校正

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 2
2 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)