[2024] [Point Transformer V3]
·
[2024] Point Transformer V3
本文《Point Transformer V3: Simpler, Faster, Stronger》是Xiaoyang Wu在2024年提出了一种名为 Point Transformer V3 (PTv3) 的点云处理模型,旨在通过简化设计、提升效率和扩展性,显著提升3D点云任务(如语义分割和实例分割)的性能。以下是本文的主要内容概括:
解决的任务
本文主要解决了3D点云处理中的以下任务:
- 点云语义分割:在ScanNet、ScanNet200、nuScenes和SemanticKITTI等数据集上进行语义分割任务。
- 点云实例分割:在ScanNet v2和ScanNet200数据集上进行实例分割任务。
- 数据高效性:在ScanNet数据高效性基准测试中,评估模型在有限数据和标注条件下的性能。
此前的技术挑战
- 点云处理的复杂性:传统的点云处理方法(如KNN)在处理不规则和稀疏的点云数据时,计算复杂度和内存消耗较高。
- 感受野限制:现有的点云处理方法在扩展感受野时,往往需要复杂的机制,导致模型难以扩展。
- 效率与精度的权衡:现有的点云处理模型在追求高精度的同时,往往牺牲了计算效率和内存消耗。
解决挑战的关键动机
关键动机:通过简化模型设计,优先考虑效率和扩展性,利用规模效应(scale)提升模型性能,而不是依赖复杂的机制。
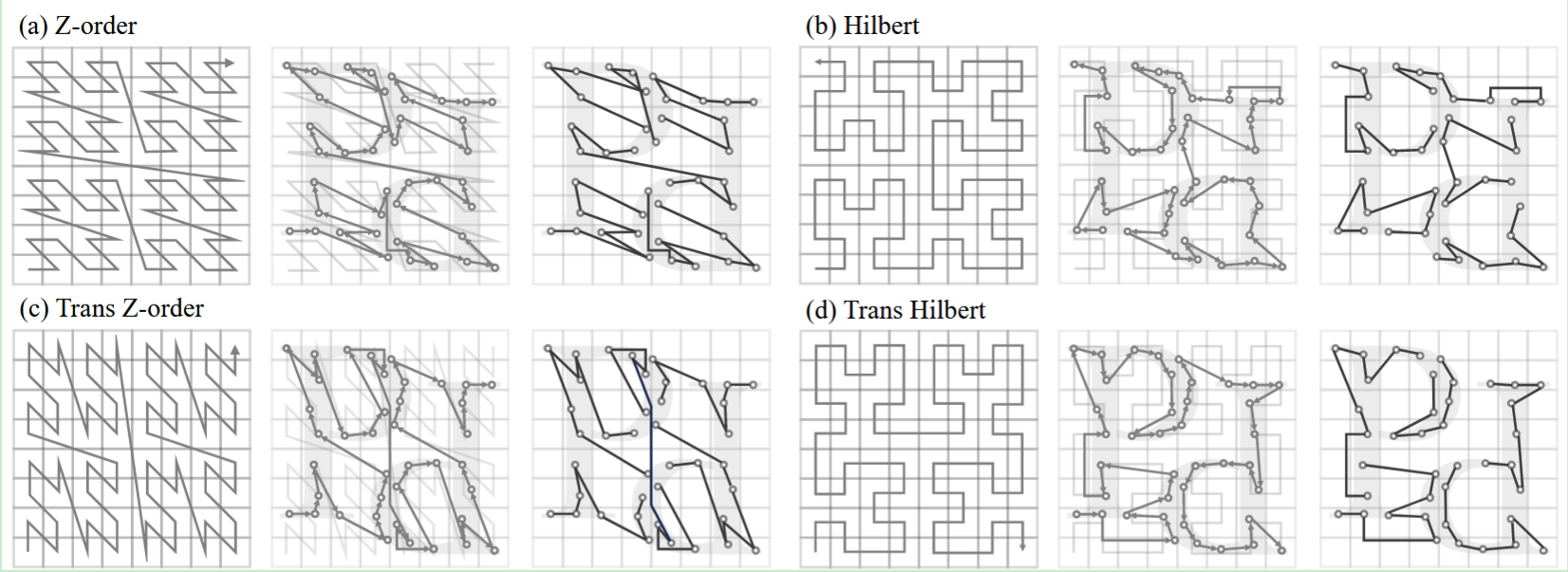
点云序列化
技术贡献
- 点云序列化:提出了一种基于空间填充曲线(space-filling curve)的点云序列化方法,将不规则的点云数据转换为有序序列,保留了空间局部性。
- 序列化注意力机制:采用窗口和点积注意力机制,结合序列化点云的特性,扩展了感受野并提升了计算效率。
- 简化设计:通过简化网络结构(如块结构、池化策略等),显著降低了模型的复杂度和内存消耗,同时保持了高性能。
- 多任务适应性:PTv3在多个3D点云任务(如语义分割、实例分割)中表现出色,展示了其通用性和扩展性。
实验结果
- 语义分割性能:在nuScenes和SemanticKITTI数据集上,PTv3分别比现有的SOTA模型(如SphereFormer)提升了2.0%和3.0%的mIoU分数。
- 实例分割性能:在ScanNet v2和ScanNet200数据集上,PTv3作为骨干网络显著提升了PointGroup的性能,mAP提升了4.9%。
- 数据高效性:在ScanNet数据高效性基准测试中,PTv3在有限数据和标注条件下表现出色,验证了其高效性和鲁棒性。
- 计算效率:PTv3在训练和推理过程中表现出更低的内存消耗和更快的速度,显著优于现有的点云处理模型(如MinkUNet和PTv2)。
总结
本文通过简化设计、提升效率和扩展性,提出了Point Transformer V3 (PTv3),显著提升了3D点云处理任务的性能。实验结果表明,PTv3在多个基准测试中均达到了新的SOTA水平,同时保持了较高的计算效率。本文的研究为点云处理领域提供了一种新的设计思路,展示了通过规模效应提升模型性能的潜力。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 6
6 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)