当道家思想遇上复杂系统:我开发了一款“无为而治”量化实验平台
引言
“无为而治”是道家思想的精髓,强调顺应自然、不妄为,却能达到良好的治理效果。在现代科学中,复杂系统(如生态系统、社会网络、经济系统)的控制往往面临维度灾难和非线性挑战。传统控制理论主张强力干预,但有时过度控制反而导致系统失稳。那么,能否将道家的智慧转化为可量化的控制算法?我尝试用Python开发了一款交互式仿真平台,让用户直观体验不同控制策略在复杂系统中的效果,尤其是“无为而治”策略的独特魅力。
本文将带你走进这个融合东方哲学与现代数值模拟的小项目,展示其技术实现、功能亮点,以及我在开发过程中的思考。如果你对跨学科应用、Python GUI开发或复杂系统仿真感兴趣,欢迎阅读和讨论!
项目背景:为什么做这个?
在阅读《道德经》时,“道常无为而无不为”这句话深深触动了我。联想到当前热门的复杂系统控制(如多智能体系统、非线性网络),是否存在一种控制方式,只在必要时施加最小干预,却能维持系统的和谐?现有的控制理论如PID、自适应控制等,通常需要持续或高增益的反馈,而“无为”的思想提供了一种新的视角。
因此,我决定用Python构建一个实验平台,将四种控制策略(无控制、强控制、无为而治、自适应控制)应用于一个高维非线性动力系统,通过实时可视化对比它们的性能。我希望这个工具不仅用于个人研究,也能作为一个科普演示,帮助更多人理解复杂系统的行为以及东方哲学的现代价值。
技术架构:Python + PyQt5 + Matplotlib + SciPy
项目采用纯Python开发,主要依赖:
-
PyQt5:构建跨平台桌面应用,提供丰富的控件和菜单。
-
Matplotlib:嵌入动态图表,实时绘制系统轨迹、控制量和雷达图。
-
NumPy/SciPy:数值积分、线性代数、随机数生成。
-
QThread:将耗时的模拟过程放在子线程,避免界面卡顿。
整体架构遵循MVC模式,界面与逻辑分离,便于扩展。核心的ComplexSystem类封装了非线性动力学方程(包含恢复力、耦合项、噪声),控制器均继承自基类Controller,通过多态实现策略切换。
功能亮点:所见即所得的道家控制实验
1. 灵活的参数配置
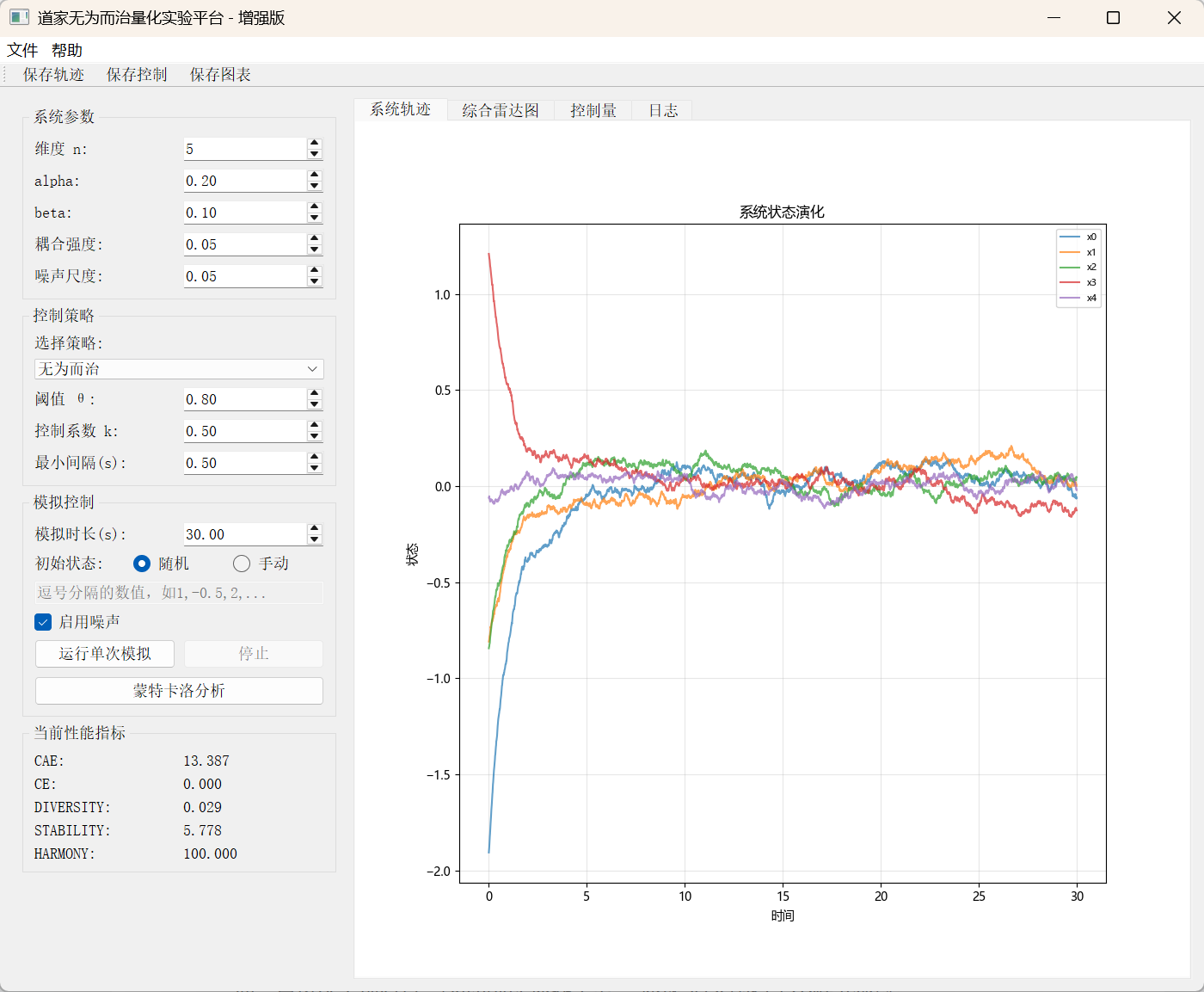
左侧控制面板允许用户实时调整系统参数(维度、非线性系数、耦合强度、噪声水平)和控制策略参数(如阈值、增益)。所有修改即时生效,并重新生成系统矩阵。
2. 四种控制策略的直观对比
-
无控制:基准线,系统自由演化。
-
强控制:高增益负反馈,试图将状态拉回零点。
-
无为而治:我的核心创新。控制器监测系统偏离程度,仅在偏离超过阈值时施加柔和的反向脉冲,且每次干预后有一段时间的“休养生息”,体现“治大国若烹小鲜”的思想。
-
自适应控制:根据当前偏差动态调整增益,作为对比的现代控制方法。
用户可通过下拉菜单即时切换策略,并看到对应参数控件自动显示/隐藏,界面友好。
3. 实时可视化三连图
-
系统轨迹图:展示各维度状态随时间的变化,可观察收敛性、振荡等。
-
控制量图:显示控制器输出的力度,直观对比干预频率和幅度。
-
雷达图:将五个性能指标(累积绝对误差、控制能量、多样性、稳定性、和谐度)归一化后绘制成五边形,综合评估策略表现。
所有图表随模拟过程动态更新,让用户一眼看出不同策略的优劣。
4. 蒙特卡洛分析与数据保存
单次模拟可能有偶然性,因此我加入了蒙特卡洛分析功能,自动运行20次随机初始状态的模拟,统计各指标的均值与标准误,并弹出结果对话框。用户还可选择保存分布直方图,从统计角度验证策略的鲁棒性。
此外,菜单栏和工具栏提供了丰富的数据导出选项:
-
保存轨迹数据(CSV)
-
保存控制量数据(CSV)
-
保存性能指标(TXT)
-
保存当前图表(PNG/PDF)
这些功能让实验可重复、结果可分享,适合用于教学或报告。
核心技术点解析
分享几个实现技巧:
多线程模拟
class SimulationThread(QThread):
update_plot = pyqtSignal(np.ndarray, np.ndarray, dict)
def run(self):
self.t, self.states = self.system.solve(...)
self.update_plot.emit(...)将耗时积分放在子线程,通过信号更新主界面,保证界面流畅。
动态参数控件
使用QStackedWidget或手动隐藏/显示控件,根据所选策略展示对应的参数输入框,代码简洁且扩展性强。
自定义控制器类
class WuWeiControl(Controller):
def compute_control(self, t, x):
# 仅当偏差超过阈值且距离上次干预足够久时激活
# 控制输出为非线性函数(如符号函数乘平方根)
# 实现“柔和干预”的思想这种面向对象的设计使得添加新策略只需继承Controller并实现compute_control,无需修改其他代码。
雷达图的动态更新
利用Matplotlib的极坐标系,将五个指标映射到0~1范围,闭合并填充,形成直观的“和谐度”形状。
项目意义与个人收获
-
跨学科融合:将道家哲学转化为可编程的控制逻辑,是一种有趣的尝试。虽然模型高度简化,但它为探索东方智慧在现代科学中的应用提供了一个窗口。
-
技术成长:从PyQt5的布局管理到多线程同步,从数值积分的稳定性到matplotlib的实时性能,这个项目让我全面锻炼了Python工程化能力。
-
开源精神:我计划将项目整理后开源(去除核心参数细节),让更多人能够基于此框架开发自己的控制策略仿真,共同推动“哲学+科学”的交叉创新。
未来展望
-
增加更多控制策略,如模糊控制、模型预测控制,形成对比库。
-
引入实际数据驱动,比如经济指标或生态数据,验证模型有效性。
-
优化3D可视化,展示高维系统的相空间轨迹。
如果你对这个项目感兴趣,或者有好的建议,欢迎在评论区留言!也欢迎关注我,后续会分享更多关于Python科学计算、仿真的有趣项目。
关注我,获取更多Python/仿真/跨学科干货!
点赞、收藏、转发,让更多人看到东方智慧与现代技术的碰撞!
注:本文仅展示项目框架与设计思路,核心算法细节暂不公开,感兴趣的朋友可关注后续开源动态。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 13
13 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)