基于MPC模型预测控制算法的车辆横向控制系统simulink建模与仿真
目录
1.课题概述
基于模型预测控制(MPC)的车辆横向控制,是自动驾驶领域实现车道保持、轨迹跟踪的核心技术。其核心是以车辆二自由度单轨动力学模型为预测模型,在每一个控制周期内,在线求解未来一段时域内的最优控制序列,仅执行当前时刻的控制量,通过滚动优化实现车辆横向轨迹的高精度跟踪;同时依托状态反馈修正模型误差,保证控制系统的鲁棒性。 本系统采用的线性二自由度车辆单轨模型,忽略了纵向动力学、悬架运动、车轮滚动等次要因素,仅保留侧向运动和横摆运动两个核心自由度,是车辆横向控制的经典简化模型,既能满足控制器设计的精度需求,又能保证计算实时性,适配 MPC 的在线优化要求。系统的控制目标是最小化横向轨迹误差(CTE) 和横摆角误差,让车辆实际行驶轨迹无限逼近参考轨迹。
2.系统仿真结果
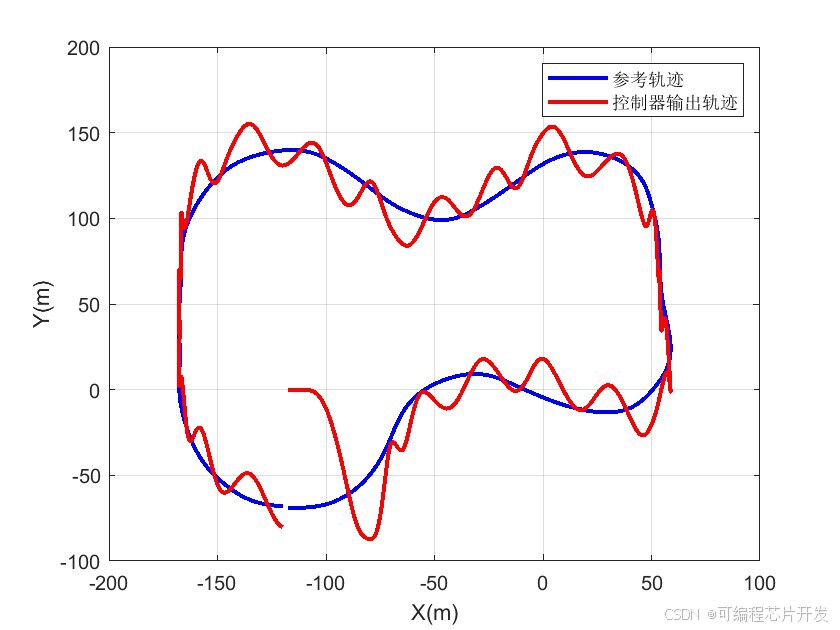
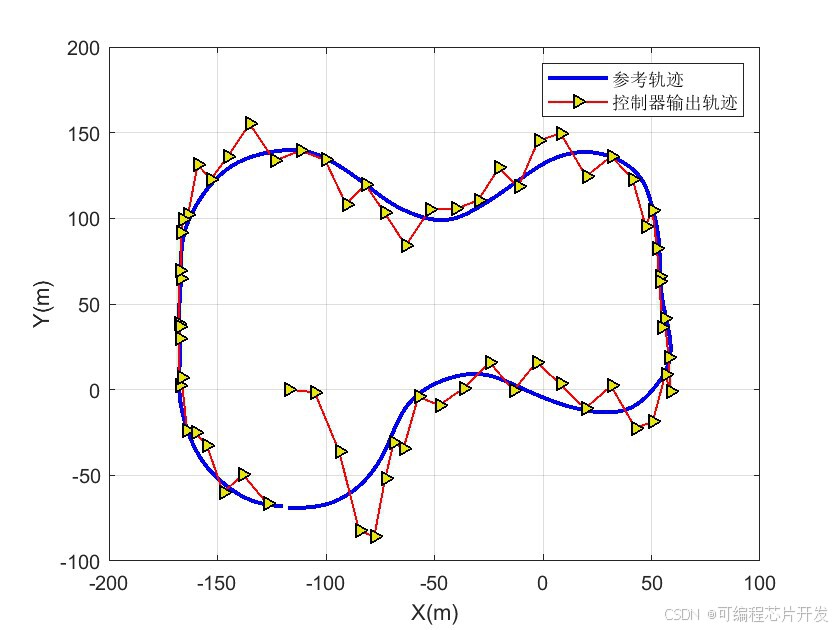
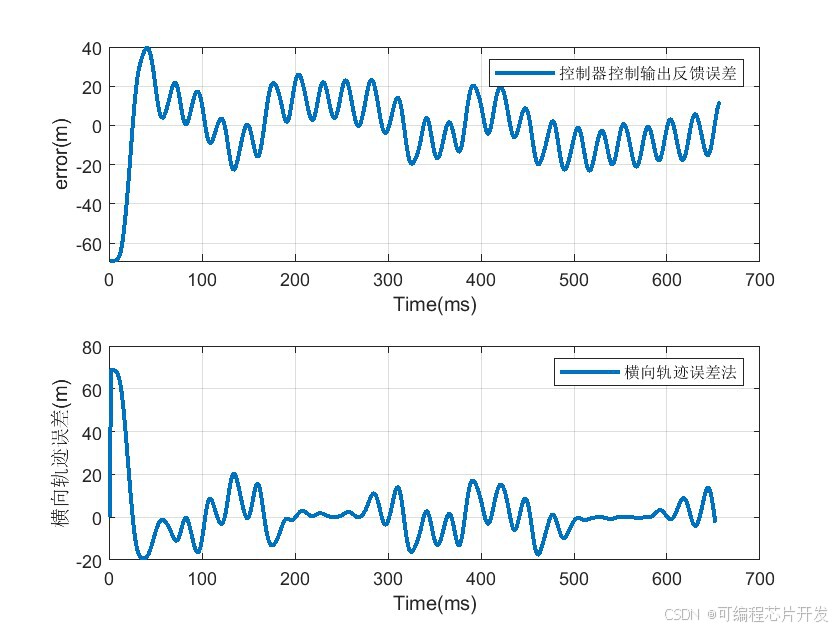
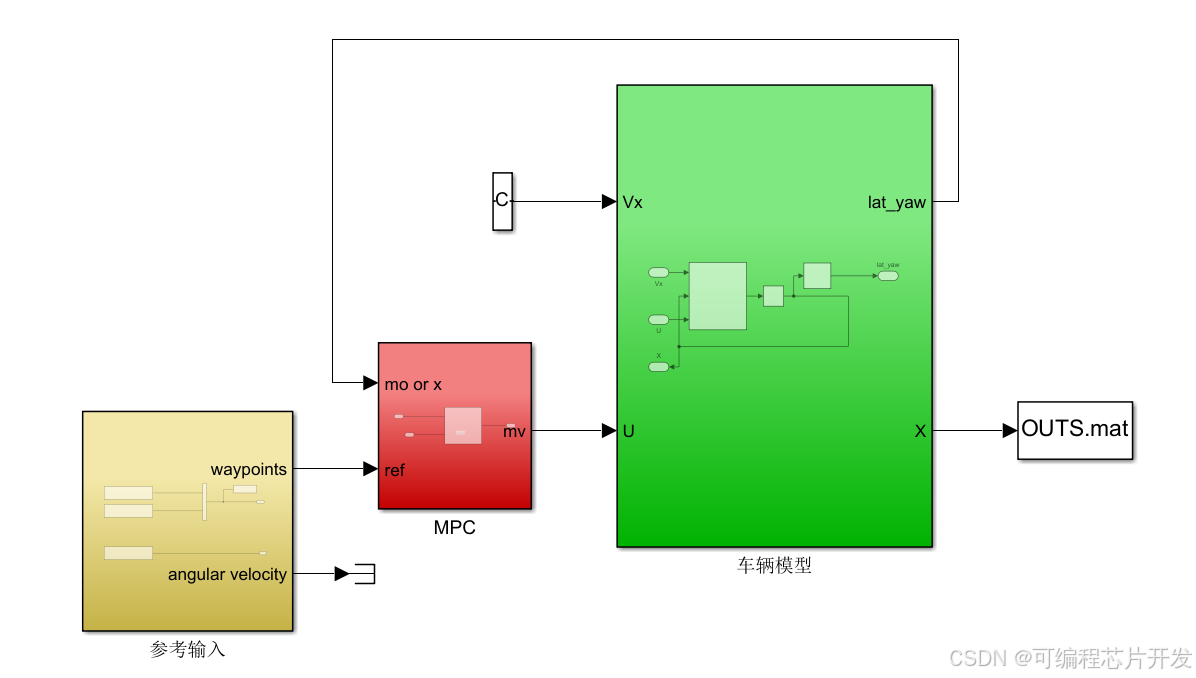
3.核心程序或模型
版本:Matlab2024b
4.系统原理简介
为简化建模,模型遵循以下核心假设:车辆仅做平面运动,忽略垂向、俯仰、侧倾运动;左右车轮合并为单轮,前后轮侧偏力线性变化;纵向速度恒定,不考虑加速/减速;忽略空气阻力与地面滚动阻力。该假设下,模型仅包含侧向速度和横摆角速度两个核心状态,结合横摆角、侧向位移,构成4维状态空间,完美适配横向控制需求。
4.1 状态变量与控制变量

vy:车辆质心侧向速度(m/s),描述车辆横向移动速度;
φ:车辆横摆角(rad),描述车身航向与参考航向的偏差;
φ˙:车辆横摆角速度(rad/s),描述车身转向速率;
y:车辆质心侧向位移(m),即横向轨迹误差CTE;
控制输入向量:u=δf
δf:前轮转向角(rad),是系统唯一控制输入,由MPC控制器输出;
4.2 侧向力平衡方程
根据牛顿第二定律,车辆侧向合力等于质量乘以侧向加速度,前后轮侧偏力提供侧向控制力:

其中,Vx为车辆纵向速度,αf为前轮侧偏角,αr为后轮侧偏角。
侧偏角物理意义为车轮行驶方向与车轮平面的夹角,线性范围内侧偏力与侧偏角成正比,侧偏角公式:

4.3 横摆力矩平衡方程
绕质心的横摆力矩等于转动惯量乘以角加速度,前后轮侧偏力对质心的力矩构成横摆力矩:

4.4 运动学方程
侧向位移的变化率由侧向速度和纵向速度共同决定:
4.5 模型矩阵
状态矩阵描述了系统状态之间的动态耦合关系,4×4 矩阵的每一行对应一个状态的微分方程:

第一行:侧向速度的变化率,受侧向速度、横摆角速度耦合影响;
第二行:横摆角的变化率等于横摆角速度;
第三行:横摆角速度的变化率,由前后轮侧偏力矩决定;
第四行:侧向位移的变化率,由侧向速度和横摆角共同决定。
输入矩阵描述了控制输入(前轮转角)对系统状态的影响能力,4×1列向量:

前轮转角直接影响侧向加速度和横摆角加速度,是驱动系统状态变化的唯一输入。
4.6 MPC模型预测控制实现
车辆动力学模型为连续时间模型,而计算机控制为离散系统,需通过前向欧拉法、零阶保持器将连续模型离散化,得到离散状态空间方程:
![]()
其中Ad、Bd为离散化后的状态矩阵和输入矩阵,k为当前控制周期,k+1为下一周期。离散化是连接物理模型与数字控制器的关键,保证模型能在计算机中实时运算。
预测时域Np:控制器预测未来Np个周期的车辆状态,是MPC的核心参数,决定预测精度;
控制时域Nc:控制器求解未来Nc个周期的控制输入序列,Nc<Np,减少优化计算量。
5.完整工程文件
v v
关注后,GZH回复关键词:a35
或回复关键词:MPC

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 10
10 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)