感应异步电机无传感器矢量控制:基于磁链观测器的FOC与SVPWM实现及仿真分析
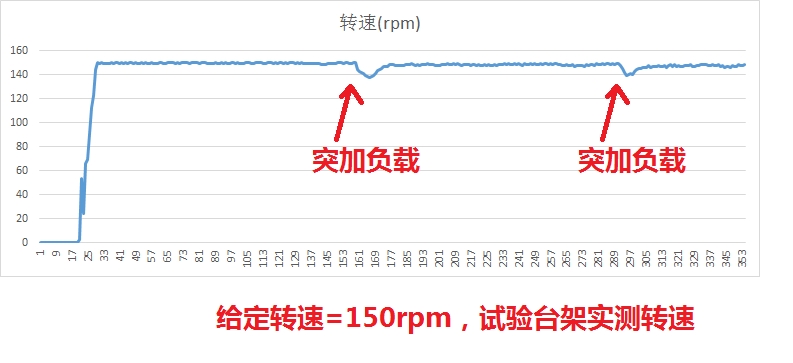
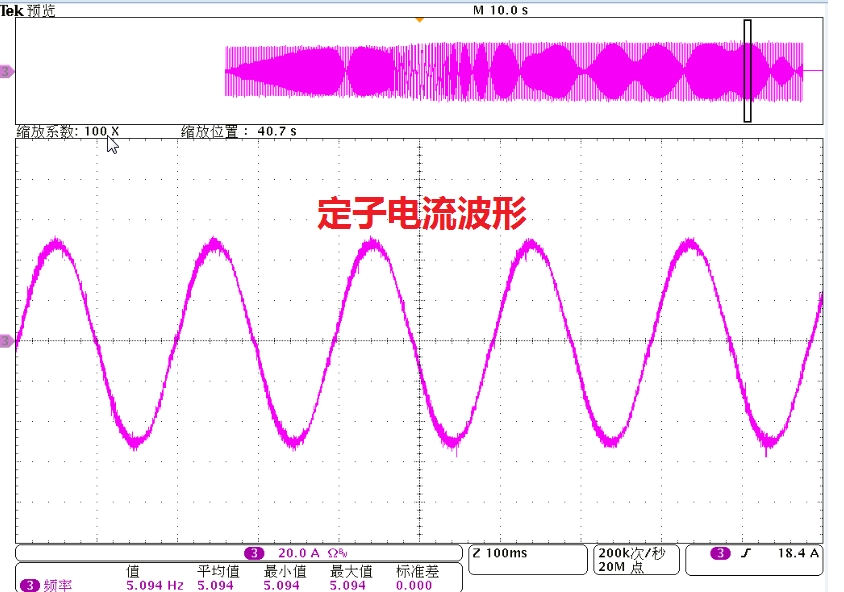
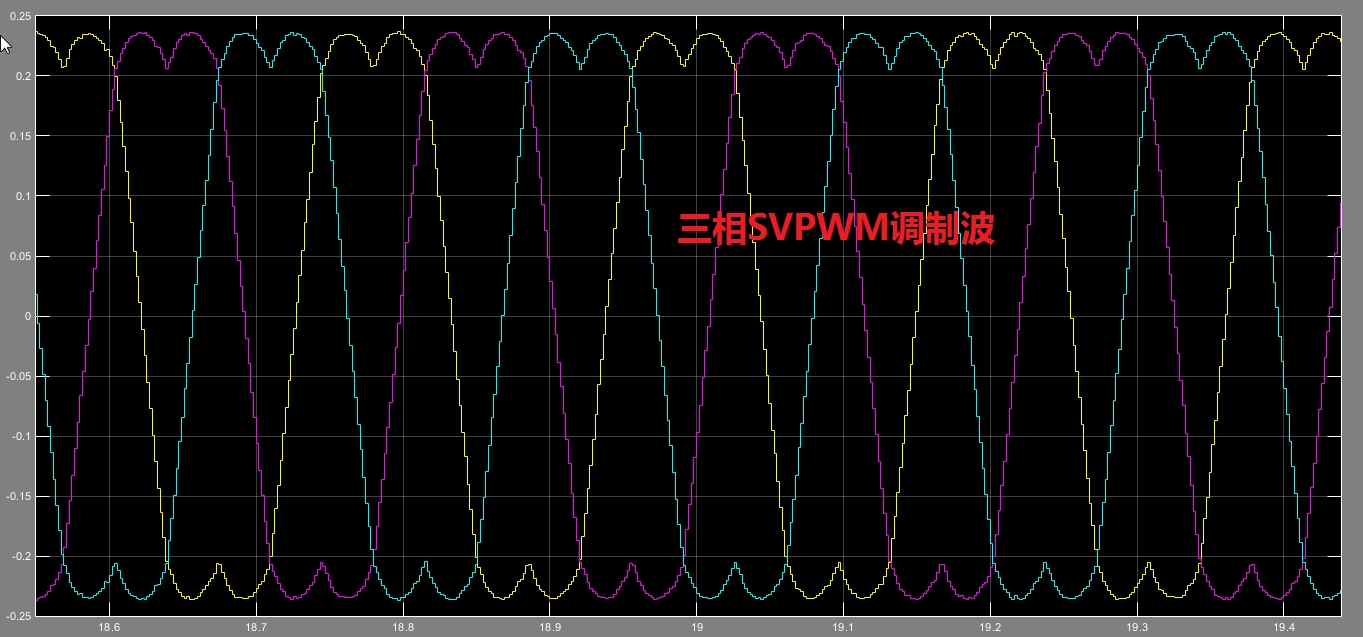
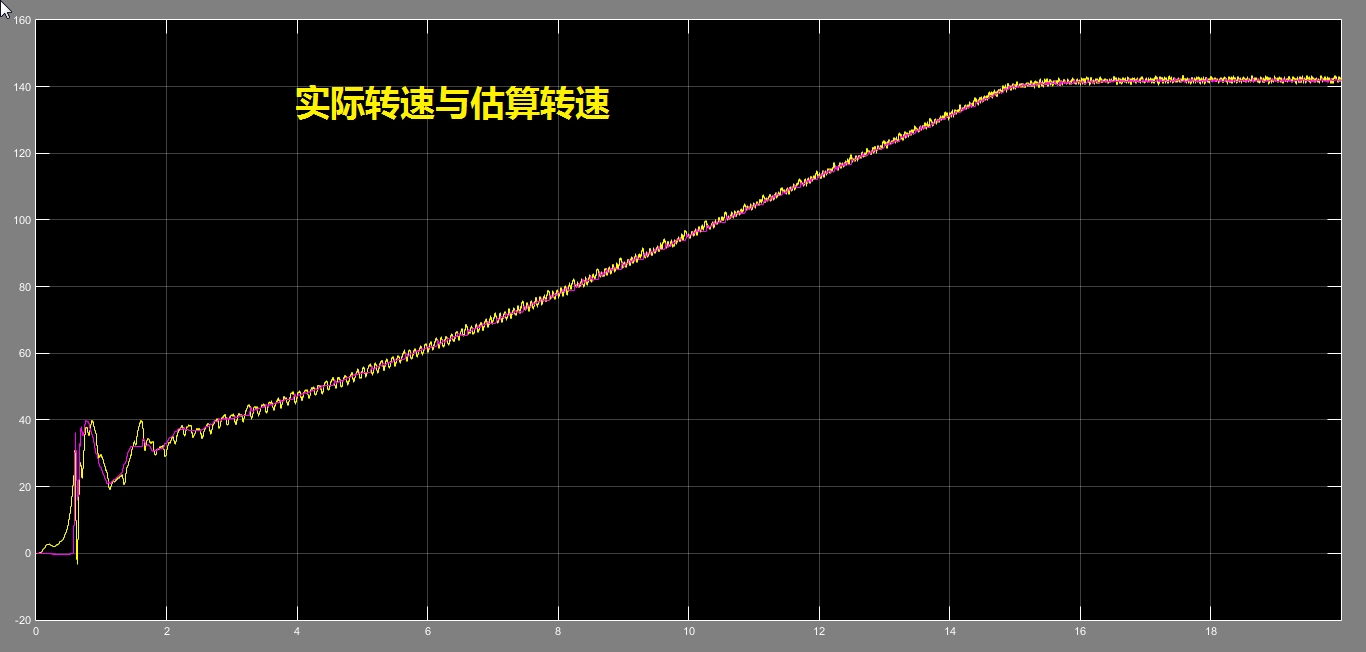
感应异步电机的无传感器矢量控制,完整的C代码+仿真模型: 1. 基于“电压模型+电流模型”的磁链观测器,实现转子磁场定向控制(FOC),可实现电机在低速、中高速段的高精度的转速估算; 代码已经成功移植到DSP芯片(TMS320F28335)和STM32F107中,对一台额定功率为33kW的异步电机进行了无传感器矢量控制,波形和试验台架数据见下图。 2. 可实现电机带满载零速启动,抗负载扰动性强,响应速度快,控制精度高; 3. SVPWM空间电压矢量调制,定子电流波形的畸变率低; 4.采用S-Function的方式,把C代码直接在simulink下进行仿真,所见即所得! 5.详细的算法原理推导,跟程序代码是完全对应的。
一、系统概述
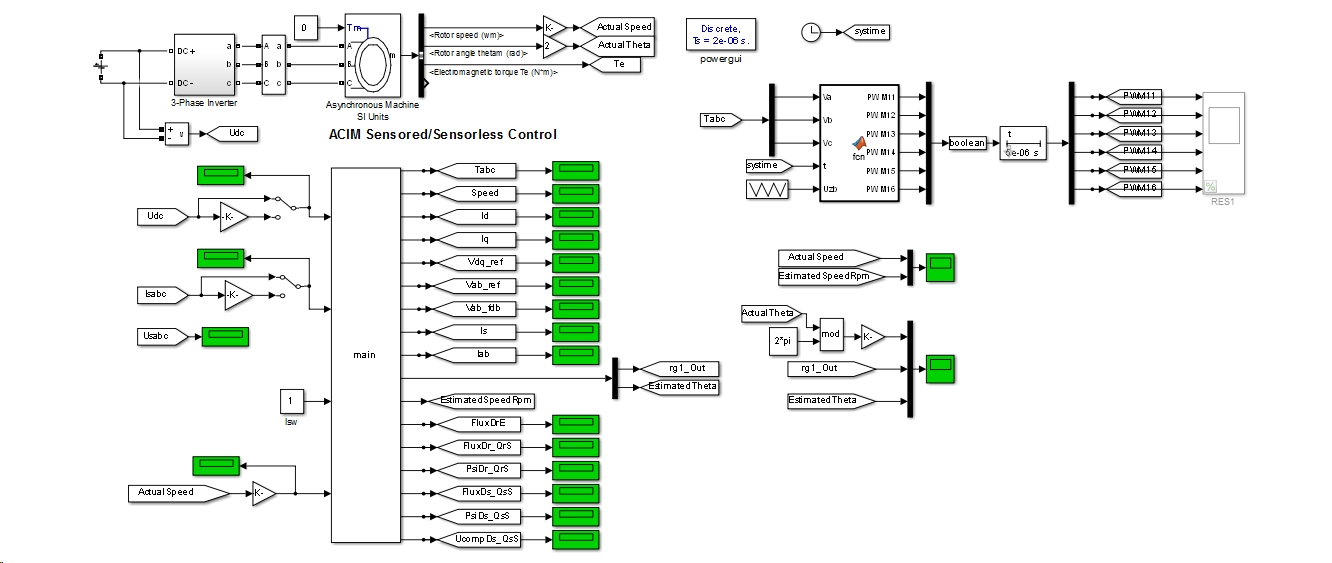
本套代码针对感应异步电机无传感器矢量控制场景开发,采用“电压模型+电流模型”融合的磁链观测方案,结合转子磁场定向控制(FOC)技术,实现电机全转速段(低速至中高速)的高精度转速估算与稳定控制。代码已完成DSP(TMS320F28335)与STM32F107芯片的移植验证,在40kW额定功率异步电机上实现带满载零速启动、抗负载扰动及快速响应控制,同时通过SVPWM(空间电压矢量调制)技术降低定子电流畸变率,保障电机运行效率与稳定性。
感应异步电机的无传感器矢量控制,完整的C代码+仿真模型: 1. 基于“电压模型+电流模型”的磁链观测器,实现转子磁场定向控制(FOC),可实现电机在低速、中高速段的高精度的转速估算; 代码已经成功移植到DSP芯片(TMS320F28335)和STM32F107中,对一台额定功率为33kW的异步电机进行了无传感器矢量控制,波形和试验台架数据见下图。 2. 可实现电机带满载零速启动,抗负载扰动性强,响应速度快,控制精度高; 3. SVPWM空间电压矢量调制,定子电流波形的畸变率低; 4.采用S-Function的方式,把C代码直接在simulink下进行仿真,所见即所得! 5.详细的算法原理推导,跟程序代码是完全对应的。
从开发架构看,代码支持Simulink仿真与实际硬件控制双重场景:通过S-Function将C代码嵌入Simulink环境,实现“仿真-代码-硬件”的无缝衔接,开发者可直观观察控制效果;同时提供完整的算法原理推导文档,确保代码逻辑与理论模型完全对齐,降低二次开发与调试难度。
二、核心功能模块解析
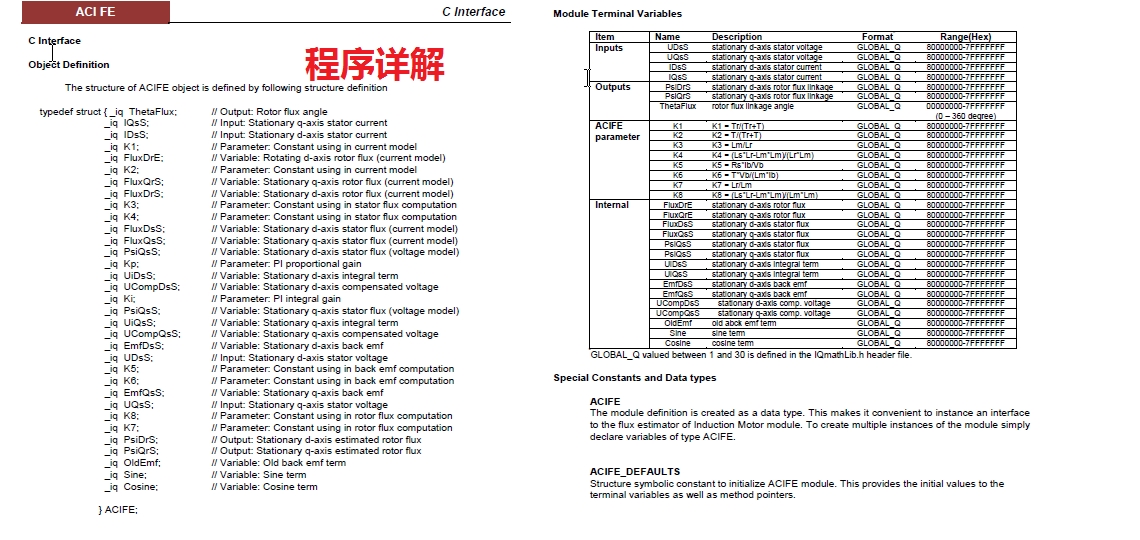
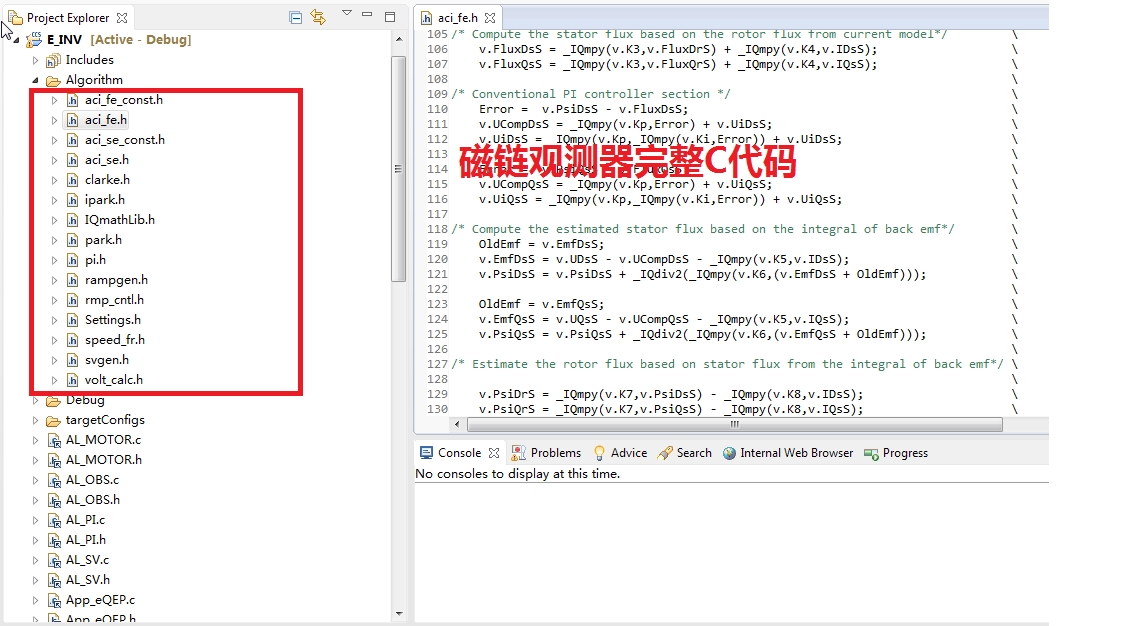
2.1 磁链观测模块(ACIFE)
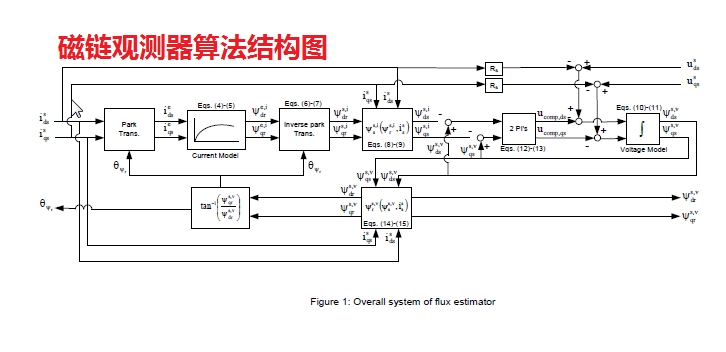
磁链观测是无传感器控制的核心,本模块通过“电流模型+电压模型”融合策略,解决单一模型在不同转速段的局限性:
- 电流模型:基于电机参数(转子电阻Rr、转子电感Lr等)构建,在低速段(尤其是零速启动阶段)精度更高。通过转子磁链微分方程计算旋转坐标系下的d轴转子磁链(FluxDrE),再经逆Park变换转换为静止坐标系下的磁链分量(FluxDrS、FluxQrS),避免低速时电压模型积分漂移问题。
- 电压模型:通过定子电压、电流的实时采样值,结合反电动势积分计算静止坐标系下的定子磁链(PsiDsS、PsiQsS),在中高速段响应速度更快。模块内置PI控制器,对电压模型与电流模型的磁链偏差进行补偿(UCompDsS、UCompQsS),修正反电动势计算误差,提升磁链观测精度。
- 融合逻辑:通过权重分配策略,低速段以电流模型输出为主,中高速段以电压模型输出为主,同时利用PI控制器动态调整偏差,最终输出高精度的转子磁链角度(ThetaFlux)与磁链分量(PsiDrS、PsiQrS),为磁场定向控制提供基础。
2.2 转速估算模块(ACISE)
基于磁链观测结果,模块通过“转差率计算+同步速度滤波”实现无传感器转速估算,具体流程如下:
- 转差率计算:根据静止坐标系下的转子磁链(PsiDrS、PsiQrS)与定子电流(IDsS、IQsS),结合电机转子参数(Rr、Lr),通过电磁转矩与磁链的关系推导转差率(WSlip),确保低速段转速估算的准确性。
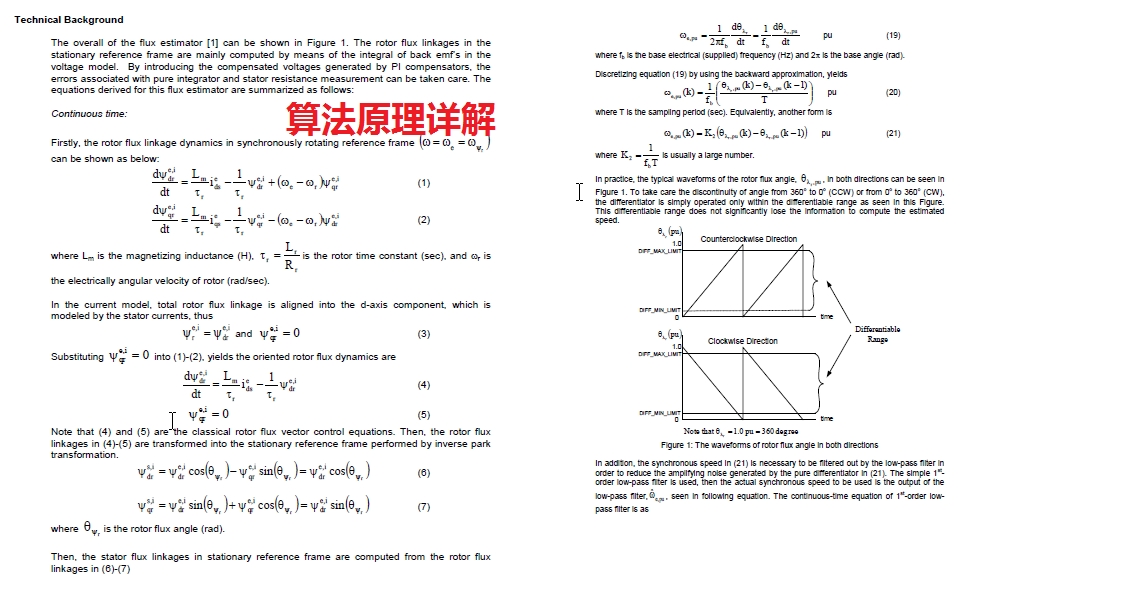
- 同步速度提取:对磁链观测模块输出的转子磁链角度(ThetaFlux)进行微分处理,得到同步速度(WSyn)。为避免角度突变导致的微分震荡,设置角度阈值(DIFFMAXLIMIT、DIFFMINLIMIT),仅在角度处于稳定区间时进行微分计算。
- 低通滤波与转速输出:通过一阶低通滤波器对同步速度(WSyn)进行平滑处理,消除高频噪声;再结合转差率(WSlip)计算实际转子转速(WrHat,标幺值),最终转换为物理转速(WrHatRpm,单位:rpm)。模块支持转速限幅(-1.5~1.5 pu),防止极端工况下的估算值溢出。
2.3 坐标变换模块
坐标变换是矢量控制的核心环节,实现“三相静止坐标系-两相静止坐标系-两相旋转坐标系”的转换,包括Clarke变换、Park变换与逆Park变换三个子模块:
- Clarke变换(CLARKE):将三相定子电流(As、Bs、Cs)转换为两相静止坐标系下的电流分量(Alpha、Beta),消除三相电流的耦合关系。变换过程基于三相平衡假设,通过固定系数(1/√3≈0.577)简化计算,为后续Park变换提供输入。
- Park变换(PARK):将两相静止坐标系下的电流(Alpha、Beta)转换为两相旋转坐标系下的电流(Ds、Qs),其中旋转坐标系的角度由磁链观测模块的转子磁链角度(ThetaFlux)决定。通过正弦(Sine)、余弦(Cosine)函数实现坐标旋转,使电流分解为“励磁分量(Ds)”与“转矩分量(Qs)”,便于独立控制。
- 逆Park变换(IPARK):将旋转坐标系下的电压指令(Ds、Qs)转换为两相静止坐标系下的电压指令(Alpha、Beta),为SVPWM调制提供输入。变换逻辑与Park变换对称,确保电压指令与电流控制目标的一致性。
2.4 闭环控制模块
系统采用“转速环-电流环”双闭环控制架构,通过PI控制器实现高精度跟踪与抗扰动,具体包括:
- 转速环(PI_SPD):以目标转速(SpeedRef)与估算转速(WrHat)的偏差为输入,通过PI调节输出转矩电流指令(IQRef)。为避免转速波动,设置转速环分频系数(SpeedLoopPrescaler),降低转速环的控制频率(通常为电流环的1/10~1/20),提升系统稳定性。
- 电流环(PIID、PIIQ):分为励磁电流环(PIID)与转矩电流环(PIIQ):
- 励磁电流环:跟踪励磁电流指令(IdRef)与Park变换后的Ds轴电流,输出旋转坐标系下的励磁电压指令(Vd),控制电机磁链稳定;
- 转矩电流环:跟踪转速环输出的IQRef与Park变换后的Qs轴电流,输出旋转坐标系下的转矩电压指令(Vq),控制电机转矩输出。
- PI控制器特性:所有PI控制器均支持输出限幅(Umax、Umin),防止电压指令超出逆变器能力;同时内置积分抗饱和逻辑,当控制器输出达到限幅时,暂停积分累积,避免系统超调与震荡。
2.5 SVPWM调制模块(SVGEN)
空间电压矢量调制(SVPWM)模块将两相静止坐标系下的电压指令(Alpha、Beta)转换为逆变器的三相开关信号(Ta、Tb、Tc),相比传统SPWM调制,可提升直流母线电压利用率约15%,同时降低定子电流畸变率:
- 扇区判断:根据Alpha、Beta电压分量计算临时变量(tmp1、tmp2、tmp3),通过阈值比较确定当前电压矢量所在的扇区(VecSector,共6个扇区),为矢量合成提供依据。
- 占空比计算:根据不同扇区的电压矢量组合,计算三相开关管的导通时间(Ta、Tb、Tc),确保输出电压矢量的幅值与相位跟踪指令值。
- 开关补偿(可选):支持根据定子电流大小(As、Bs、Cs)进行开关时间补偿(switch_conpensate),消除逆变器死区时间导致的电压误差,提升低速运行时的电流波形质量。
2.6 辅助功能模块
- 参数配置模块(Settings):集中管理电机参数(定子电阻Rs、转子电感Lr、极对数POLES等)、控制参数(采样频率ISRFREQUENCY、标幺值基准BASEVOLTAGE/BASE_CURRENT等)与开发等级(BUILDLEVEL)。开发等级支持从“模块单独测试(LEVEL1)”到“无传感器全速控制(LEVEL6)”的渐进式调试,降低开发风险。
- 斜坡生成模块(RAMPGEN、RMPCNTL):
- RAMPGEN:生成周期性的角度斜坡信号,为坐标变换提供同步时钟;
- RMPCNTL:实现转速指令的斜坡过渡,避免目标转速突变导致的电流冲击,提升电机启动与调速的平滑性。
- 数据输出模块:支持输出17路关键控制信号,包括逆变器开关指令(Tabc)、电流/电压指令与反馈值、磁链观测结果、转速估算值等,便于仿真调试与硬件测试时的数据分析。
三、控制流程总览
- 信号采样与预处理:采集逆变器直流母线电压(Udc)与三相定子电流(Isabc),对电流信号进行标幺值转换(除以BASE_CURRENT),消除电机参数差异的影响。
- 坐标变换:通过Clarke变换将三相电流转换为Alpha/Beta分量,再经Park变换转换为Ds/Qs分量,实现电流的解耦。
- 闭环控制:
- 转速环:比较目标转速与估算转速,输出转矩电流指令;
- 电流环:分别跟踪励磁电流与转矩电流指令,输出Vd/Vq电压指令。 - 逆坐标变换:通过逆Park变换将Vd/Vq转换为Alpha/Beta电压指令,为SVPWM调制提供输入。
- SVPWM调制:根据Alpha/Beta电压指令生成三相开关信号,控制逆变器输出电压,驱动电机运行。
- 磁链与转速估算:基于采样电压、电流与开关信号,通过ACIFE模块观测转子磁链,再通过ACISE模块估算电机转速,为无传感器控制提供反馈。
四、硬件与仿真适配
4.1 硬件适配
代码已完成两款主流MCU的移植验证:
- TMS320F28335(DSP):利用其高性能浮点运算单元,满足复杂磁链观测与PI调节的实时性需求;
- STM32F107(ARM Cortex-M3):通过优化代码结构(如简化浮点运算、采用定点数标幺值),在中低性能MCU上实现稳定控制,降低硬件成本。
硬件接口需满足:3路ADC采样(三相电流)、1路ADC采样(直流母线电压)、6路PWM输出(逆变器驱动),同时支持中断触发采样与控制周期(匹配ISR_FREQUENCY配置)。
4.2 仿真适配
通过S-Function(main.c)将C代码嵌入Simulink环境,实现“代码即模型”的仿真模式:
- 仿真时,Simulink调用C代码中的控制逻辑,无需搭建额外的模块框图,确保仿真与实际硬件代码的一致性;
- 支持实时观测关键信号波形(如定子电流、转速、磁链),便于快速验证算法逻辑,缩短开发周期。
五、核心特性与应用场景
5.1 核心特性
- 全转速段高精度控制:融合磁链观测模型,实现低速零速启动与中高速稳定运行,转速估算误差小;
- 强抗扰能力:双闭环PI控制架构与SVPWM调制技术,确保负载突变时的转速稳定性与电流波形质量;
- 灵活可扩展:模块化设计支持电机参数与控制参数的快速适配,可移植至不同功率等级(如10kW~100kW)的异步电机;
- 渐进式开发:开发等级划分与丰富的调试输出,降低新手入门难度与项目开发风险。
5.2 应用场景
适用于对转速控制精度、启动性能与成本敏感的工业场景,如:
- 工业电机驱动(风机、水泵、传送带);
- 新能源设备(光伏水泵、小型风电变桨电机);
- 交通运输(电动叉车、低速电动车驱动);
- 医疗设备(精密医疗器械中的驱动电机)。
六、开发与调试建议
- 参数校准:首先通过LEVEL2等级校准电流采样偏移(消除ADC零漂),确保电流反馈的准确性;再根据实际电机参数修正Rs、Lr、LM等,避免参数不匹配导致的控制失稳。
- 渐进式调试:从LEVEL3(电流环闭环)开始,逐步升级至LEVEL6(无传感器控制),每个等级验证通过后再进行下一阶段,减少问题定位难度。
- 波形分析:重点关注低速时的电流畸变率、转速突变时的响应速度、负载扰动后的恢复时间,通过调整PI参数(Kp、Ki)优化控制性能。
- 硬件保护:在硬件设计中加入过流、过压、过温保护逻辑,配合代码中的输出限幅功能,避免极端工况下的设备损坏。
本套代码通过模块化设计、高精度算法与丰富的调试功能,为感应异步电机无传感器矢量控制提供了完整的解决方案,既适用于工业产品开发,也可作为高校科研与工程教育的参考案例。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献179条内容
已为社区贡献179条内容

所有评论(0)