三相感应异步电机参数辨识:C代码与仿真模型
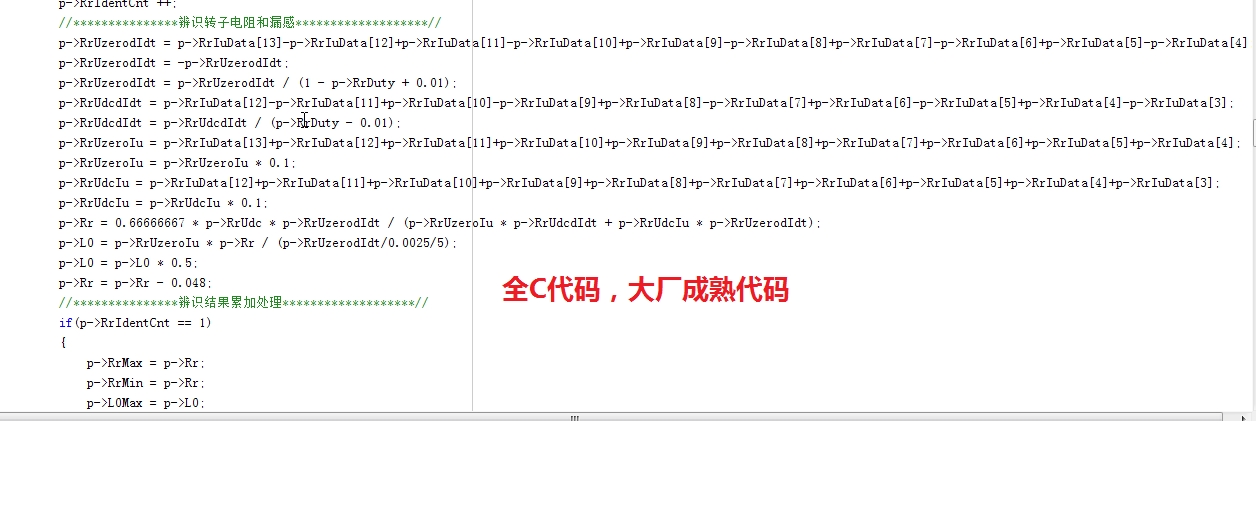
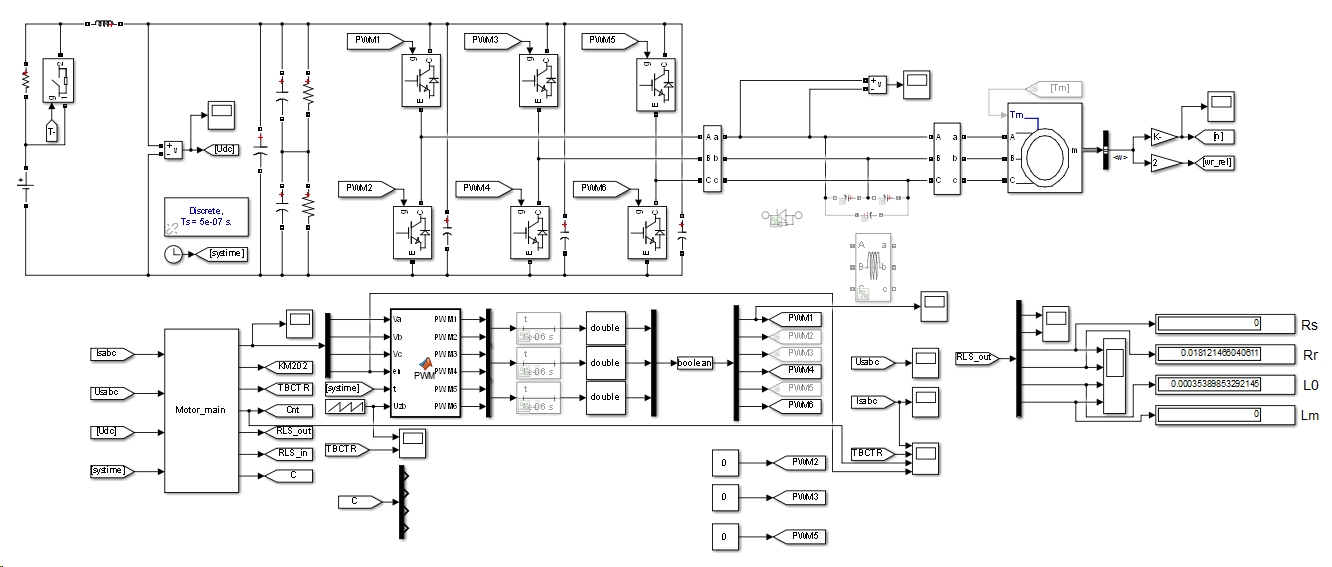
三相感应异步电机的参数辨识,大厂成熟的C代码,附赠仿真模型: 1. 第一步,辨识定子电阻; 2. 第二步,辨识转子电阻和漏感; 3. 第三步,辨识互感并计算空载电流。 大厂成熟的代码,可以直接移植,本人已经成功移植到DSP28335芯片工程中,有详细的算法原理讲解。 仿真模型采用S-Function即S函数调用C代码直接进行仿真,更贴近于硬件仿真。
引言
在现代变频驱动系统中,精确获取三相异步电机的电气参数(如定子电阻 \(Rs\)、转子电阻 \(Rr\)、漏感 \(L\sigma\)、互感 \(Lm\) 和空载电流 \(I0\))是实现高性能矢量控制(如 SVC/FVC)和参数自整定功能的前提。本文基于科润 ACD600 系列变频器的参数辨识算法实现,结合上传的《三相异步电机参数辨识算法.pdf》与《参数辨识程序+模型merged.txt》文档内容,深入剖析其软件实现逻辑、算法原理与执行流程,为嵌入式电机控制开发者提供高质量的技术参考。
一、整体辨识策略
参数辨识过程分为三个阶段,分别对应电机不同运行状态:
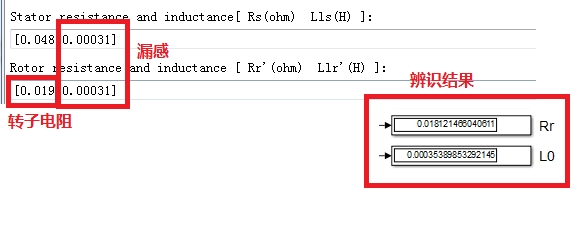
- 静止状态:辨识定子电阻 \(R_s\);
- 静止状态:辨识转子电阻 \(Rr\) 与漏感 \(L\sigma\);
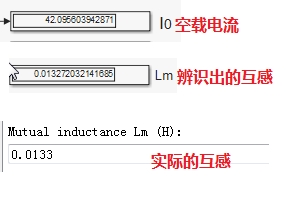
- 空载旋转状态:辨识互感 \(Lm\) 与空载电流 \(I0\)。
该策略充分利用电机在不同工况下的等效电路特性,避免相互耦合干扰,提高辨识精度与鲁棒性。
二、定子电阻 \(R_s\) 辨识 —— 直流伏安法
2.1 原理简述
采用直流激励(DC injection)方式,在 UV 两相绕组之间施加可控直流电压,测量稳态电流,依据欧姆定律计算电阻:
\[
Rs = \frac{U{DC} \cdot D}{2 \cdot I}
\]
其中:
- \(U_{DC}\):直流母线电压;
- \(D\):PWM 占空比;
- \(I\):U 相电流(实际流经两相绕组,总电阻为 \(2R_s\))。
2.2 软件流程详解
- 初始化阶段:
- 计算目标电流(额定电流的 80%);
- 配置 PWM:开关频率 4 kHz(TBPRD = 7500),W 相桥臂关闭,仅 UV 相参与;
- 初始化 CMPA = 3750(50% 占空比)。
- 占空比调节阶段:
- 逐步增大Comper(即 CMPA),直至 U 相电流达到目标值(第 5 步);
- 再次增大至 4 倍目标电流(用于双点测量,消除非线性误差)。
- 数据采集与计算:
- 在两个不同占空比下(ComperL与Comper),分别采集:
- 直流母线电压(512 次累加);
- U 相电流(512/1024 次累加,Q12 定点格式)。
- 利用两点法计算 \(R_s\),公式如下:
\[
Rs = \frac{1000 \cdot (TotalVolt \cdot D2 - TotalVoltL \cdot D1)}{2 \cdot (TotalI \cdot D2 - TotalIL \cdot D_1)} \quad [\text{单位:}0.001\,\Omega]
三相感应异步电机的参数辨识,大厂成熟的C代码,附赠仿真模型: 1. 第一步,辨识定子电阻; 2. 第二步,辨识转子电阻和漏感; 3. 第三步,辨识互感并计算空载电流。 大厂成熟的代码,可以直接移植,本人已经成功移植到DSP28335芯片工程中,有详细的算法原理讲解。 仿真模型采用S-Function即S函数调用C代码直接进行仿真,更贴近于硬件仿真。
\]
**注**:采用双点测量可有效抑制电流传感器零漂与 PWM 非理想因素影响。
- 安全收尾:
- 封锁 PWM 输出,复位 PWM 模块,防止误触发。
三、转子电阻 \(R_r\) 与漏感 \(L_\sigma\) 辨识 —— 脉冲响应法
3.1 原理简述
在电机静止状态下,施加短时直流电压脉冲。由于互感 \(Lm \gg L\sigma\),励磁支路电流近似为零,等效为仅含 \(Rs + Rr/2\) 与 \(L_\sigma\) 的 RL 回路。根据电压-电流微分关系:
- 加压阶段(\(u = U{dc}\)):
\[
U{dc} = (Rs + Rr/2) i + L_\sigma \frac{di}{dt}
\] - 续流阶段(\(u = 0\)):
\[
0 = (Rs + Rr/2) i + L_\sigma \frac{di}{dt}
\]
通过采集电流上升/下降斜率,联立求解 \(Rr\) 与 \(L\sigma\)。
3.2 软件流程详解
- PWM 配置:
- 低频(416.7 Hz,TBPRD = 12000,时钟 5 MHz);
- 死区设为 0,确保精确控制;
- EPWM1/2 配置为递增计数,EPWM3 下管常开(构成回路)。
- 自适应电流调节:
- 动态调整PwmCompareValue(即 CMPA),使电流在安全范围内(< 额定电流);
- 若超限则重试,确保系统安全。
- 脉冲激励与采样:
- 每次发送 7 个电压脉冲;
- 每脉冲采集 2 个电流点(上升沿与下降沿),共 14 点;
- 连续执行 6 次,间隔 40 ms,避免热效应累积。
- 数据处理:
- 对 6 次结果剔除最大/最小值后取平均;
- 利用数值微分(如差分)估算 \(di/dt\);
- 联立方程求解 \(Rr\) 与 \(L\sigma\)。
**优势**:低频脉冲避免高频噪声干扰,多次平均提升信噪比。
四、互感 \(L_m\) 与空载电流 \(I_0\) 辨识 —— 空载 SVPWM 法
4.1 原理简述
电机空载运行时,转差率 \(s \approx 0\),转子等效电阻 \(Rr/s \to \infty\),转子支路开路。此时电机等效为定子电阻 \(Rs\)、漏感 \(L\sigma\) 与励磁支路(\(Rm\) 并联 \(L_m\))串联。
施加 SVPWM 驱动,使电机运行于额定频率 80%(如 40 Hz),采集稳态电压/电流基波:
\[
Lm = \frac{Um \sin\theta}{2\pi f Im} - L\sigma
\]
其中:
- \(Um, Im\):电压/电流基波幅值;
- \(\theta\):电压与电流相位差;
- \(f\):运行频率。
空载电流 \(I_0\) 直接取稳态电流有效值。
4.2 软件流程详解
- 启动控制:
- 目标频率设为 80% 额定频率;
- 延时 1.6 s 确保电机加速至稳态。
- 稳态判断:
- 检测实际转速是否达标(依赖编码器或无感估算);
- 若转速过低,异常退出并重试。
- 数据采集与计算:
- 延时 240 ms 后开始采样;
- 连续 120 次辨识(约数秒),取平均值;
- 通过 DFT 或锁相环(PLL)提取基波幅值与相位。
- 安全机制:
- 实时监控转速,防止堵转或负载干扰;
- 异常时立即封锁 PWM,避免过流。
五、实验验证与性能分析
使用 ACD600-4T37G 变频器对 7.5 kW(220 V/50 Hz/26 A)电机进行 5 次重复辨识,结果如下:
| 参数 | 辨识值(5 次) | 稳定性 |
|---|---|---|
| \(R_s\) | 0.213–0.217 Ω | ±1% |
| \(R_r\) | 0.113–0.120 Ω | ±3% |
| \(L_\sigma\) | 0.84–0.86 mH | ±1.2% |
| \(L_m\) | 48.2–48.5 mH | ±0.3% |
| \(I_0\) | 8.12–8.16 A | ±0.25% |
结论:
- 算法重复性好,尤其 \(Lm\) 与 \(I0\) 精度高;
- AD 采集噪声低,定点运算(Q12)设计合理;
- 三阶段流程隔离性强,互不干扰。
六、总结
本文详细解析了三相异步电机参数辨识算法的软件实现架构。其核心亮点包括:
- 分阶段辨识:利用电机物理特性解耦参数;
- 自适应调节:动态调整 PWM 占空比确保安全;
- 多点平均与异常处理:提升鲁棒性与工业适用性;
- 定点运算与嵌入式优化:适合资源受限的 DSP/MCU 平台。
该方案已在科润 ACD600 系列变频器中成功应用,为高性能电机控制提供了可靠的参数基础,值得在同类产品中推广借鉴。
作者:资深嵌入式电机控制工程师
适用读者:变频器开发工程师、电机控制算法研究员、电力电子软件开发者

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 2
2 0
0- 0



 已为社区贡献47条内容
已为社区贡献47条内容

所有评论(0)