麦克风阵列坐标、角度与到达时延换算(波束成形核心科普)-- 来自豆包
本文专为复习波束成形(MVDR/GSC)核心原理设计,聚焦「麦克风阵列坐标→方向角→到达时延」的完整换算逻辑,用通俗语言+工程实操公式,讲透每一步原理,避免复杂冗余,适合后续复习查阅,配套之前的波束成形流程图、阵列坐标案例(AISHELL-4、CHiME4),无缝衔接实际代码应用。
一、前置基础:统一坐标系(所有波束成形通用)
波束成形算法对麦克风坐标的定义有统一标准,所有换算都基于这套三维坐标系,牢记这一步,后续所有计算都不会乱!
- 「原点 (0,0,0)」:麦克风阵列的物理中心(所有麦克风围绕这个点分布);
- 「X轴」:水平向右(可理解为阵列的“右侧”);
- 「Y轴」:水平向前(可理解为阵列的“正前方”,也是最常用的目标方向);
- 「Z轴」:垂直向上(可理解为阵列的“上方”,一般远场语音场景下Z轴无影响,可忽略);
- 「麦克风坐标表示」:每个麦克风的位置用三维向量表示 → m⃗i=(xi,yi,zi)\vec{m}_i = (x_i, y_i, z_i)mi=(xi,yi,zi)(iii 代表第iii个麦克风);
- 「关键常量」:声音在空气中的传播速度 c=343 m/sc = 343\ \text{m/s}c=343 m/s(常温常压下,工程上默认值,无需修改)。
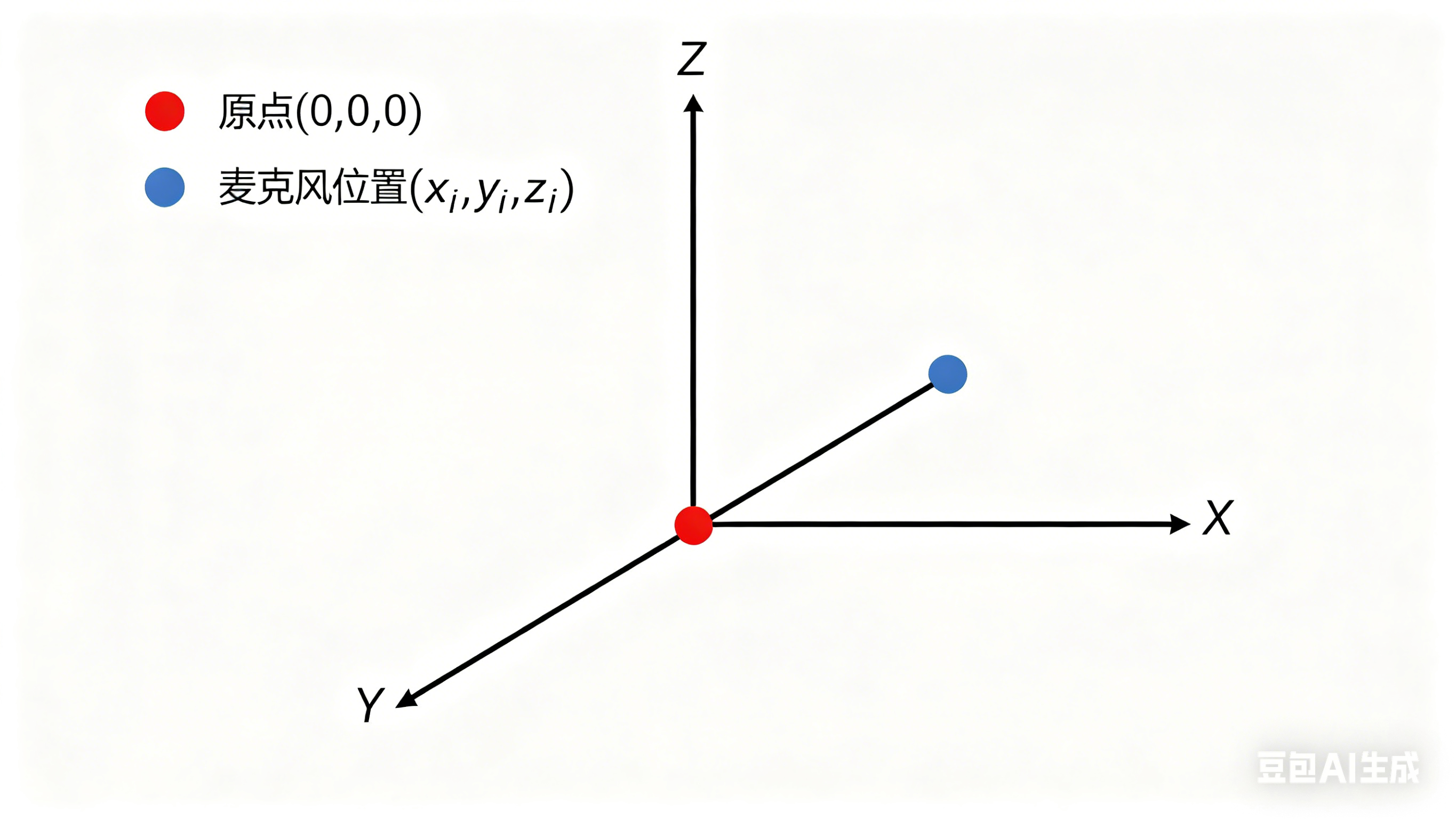
图1:麦克风阵列统一三维坐标系示意图
注:图中红点为阵列中心(0,0,0),蓝点为任意麦克风位置(x_i,y_i,z_i),清晰标注X、Y、Z三轴方向,贴合工程实际定义。
重点:不管是AISHELL-4的8麦圆阵、CHiME4的4麦圆阵,还是之前的6麦圆阵,都遵循这套坐标系,只是麦克风的(x,y,z)数值不同。
二、核心概念:方向角(方位角+俯仰角)
我们常说“声音从正前方来”“从左侧30°来”,在工程上不能用口语描述,需用两个角度精准定义声源方向,这两个角度是连接“坐标”和“时延”的关键桥梁。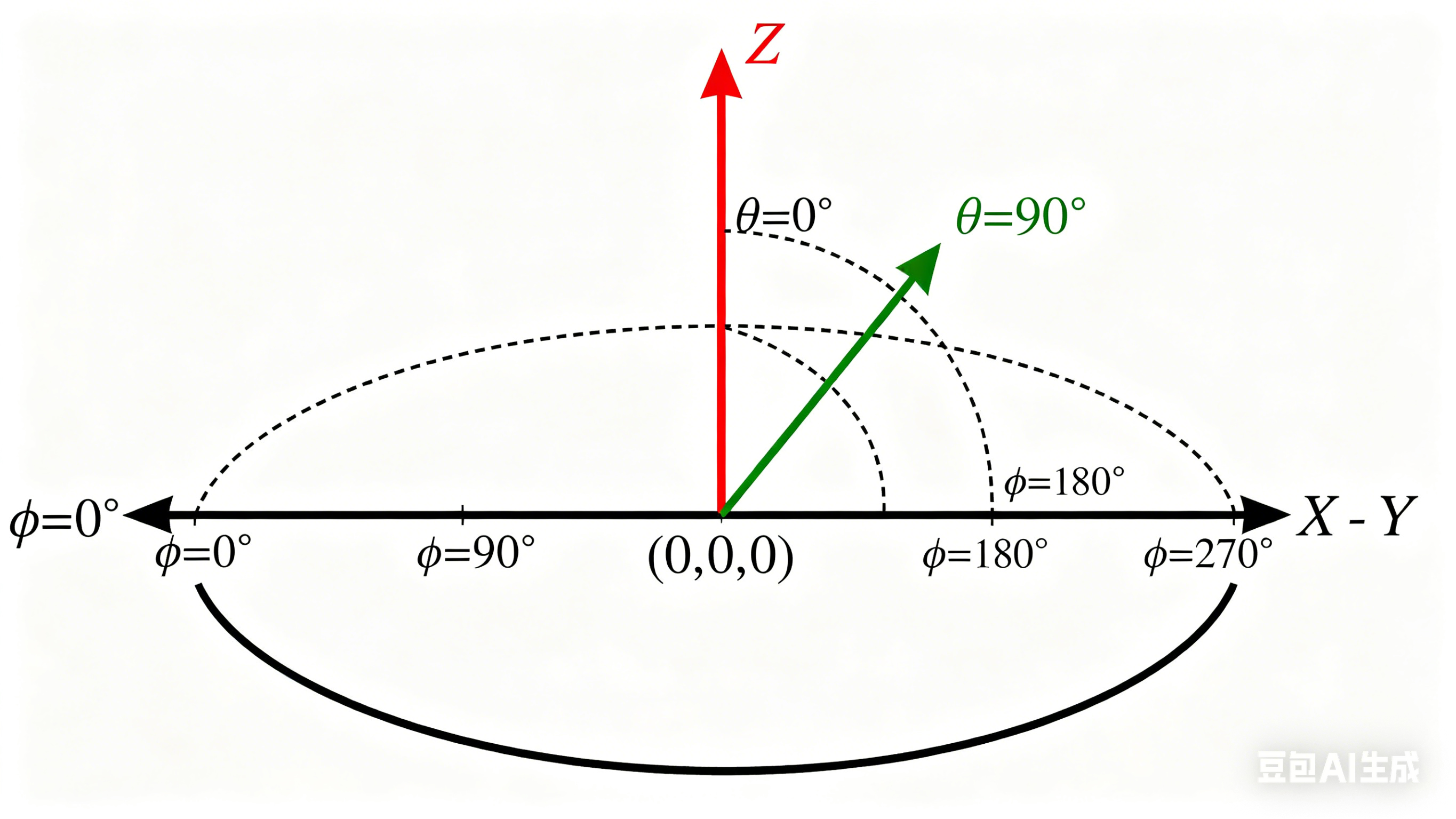
图2:方位角(φ)与俯仰角(θ)定义示意图
注:水平面(θ=90°)时,仅需关注方位角φ;图中箭头表示声源方向,清晰标注0°、90°等关键角度对应的方向。
- 方位角(Azimuth,记为 ϕ\phiϕ)
定义:绕Z轴旋转的水平角度,决定声源在“左右”方向的位置,范围 0°~360°,核心规则:
- ϕ=0°\phi = 0°ϕ=0°:正前方(Y轴正方向),也是波束成形最常对准的目标方向;
- ϕ=90°\phi = 90°ϕ=90°:正右侧(X轴正方向);
- ϕ=180°\phi = 180°ϕ=180°:正后方(Y轴负方向);
- ϕ=270°\phi = 270°ϕ=270°:正左侧(X轴负方向)。
- 俯仰角(Elevation,记为 θ\thetaθ)
定义:与Z轴的夹角,决定声源在“上下”方向的位置,范围 0°~90°,核心规则:
- θ=0°\theta = 0°θ=0°:正上方(Z轴正方向);
- θ=90°\theta = 90°θ=90°:水平面(与X-Y平面平行,远场语音场景最常用,此时Z轴分量可忽略);
- θ\thetaθ 越小,声源越靠上;θ\thetaθ 越大,声源越贴近水平面。
- 关键:方向向量(d⃗\vec{d}d)
不管是方位角还是俯仰角,最终都要转换成「方向向量」,才能和麦克风坐标进行计算——方向向量是“角度”和“坐标”的转换中介,本质是“声源方向的单位向量”(长度为1,只表示方向,不表示距离)。
方向向量公式(工程上直接套用,无需推导):
d⃗=[dxdydz]=[sinθcosϕsinθsinϕcosθ]\vec{d} = \begin{bmatrix} d_x \\ d_y \\ d_z \end{bmatrix} = \begin{bmatrix} \sin\theta\cos\phi \\ \sin\theta\sin\phi \\ \cos\theta \end{bmatrix}d= dxdydz = sinθcosϕsinθsinϕcosθ
实操简化:远场语音场景中,我们通常只关注水平面(θ=90°\theta = 90°θ=90°),此时 sin90°=1\sin90°=1sin90°=1,cos90°=0\cos90°=0cos90°=0,公式简化为:
d⃗=[cosϕsinϕ0]\vec{d} = \begin{bmatrix} \cos\phi \\ \sin\phi \\ 0 \end{bmatrix}d= cosϕsinϕ0
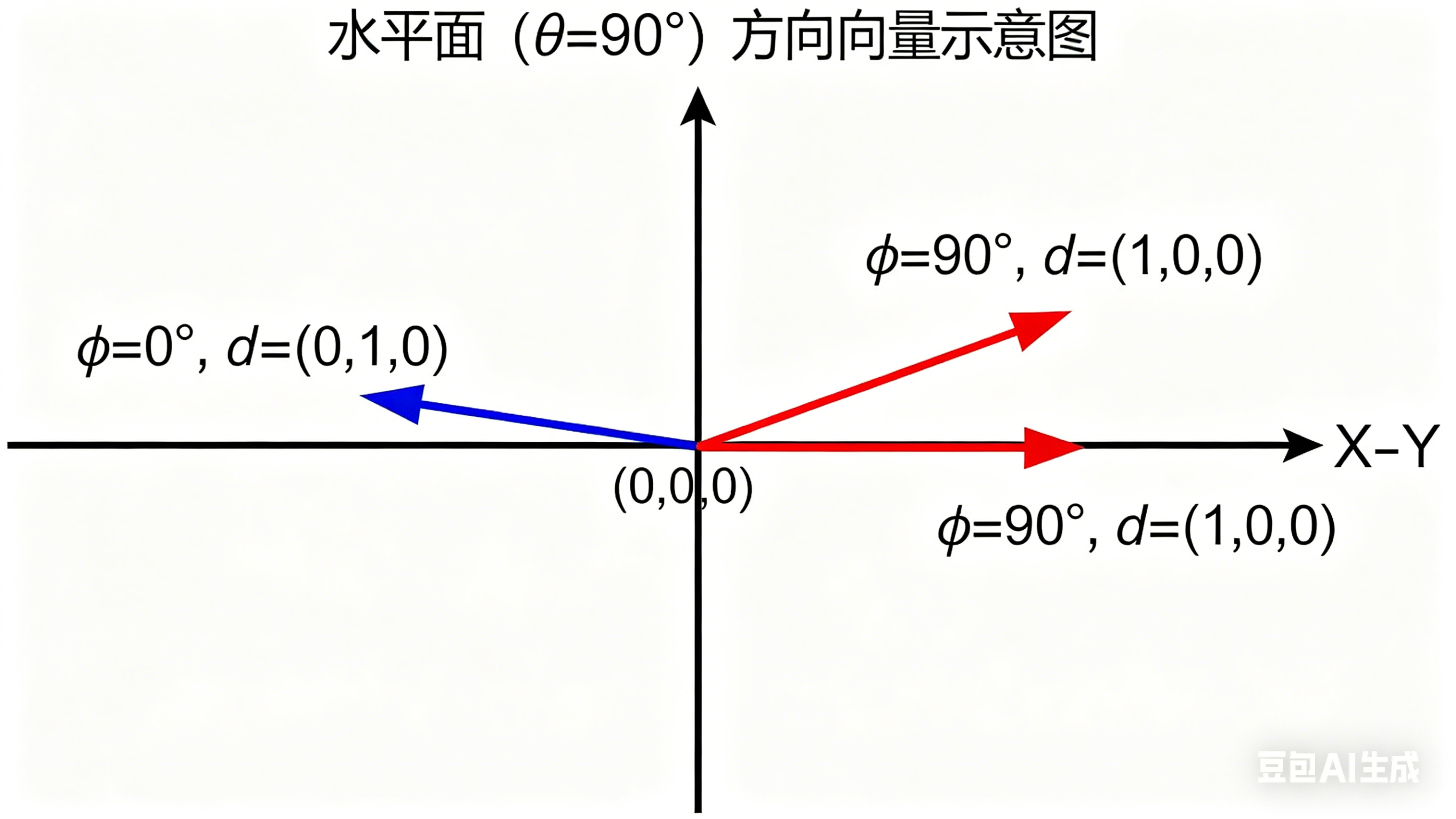
图3:水平面(θ=90°)方向向量示意图
注:图中展示φ=0°(正前方,d=(0,1,0))、φ=90°(正右侧,d=(1,0,0))的方向向量,直观体现方向向量与方位角的关系。
举例:声源在正前方(ϕ=0°\phi=0°ϕ=0°,θ=90°\theta=90°θ=90°),方向向量 d⃗=(0,1,0)\vec{d} = (0, 1, 0)d=(0,1,0);声源在右侧90°(ϕ=90°\phi=90°ϕ=90°,θ=90°\theta=90°θ=90°),方向向量 d⃗=(1,0,0)\vec{d} = (1, 0, 0)d=(1,0,0)。
三、核心换算:坐标 → 到达时延(τi\tau_iτi)
这是整个波束成形的核心一步:麦克风坐标和方向向量结合,计算出声源到达每个麦克风的“时间差”,这个时间差(时延)直接决定了后续导向矢量的计算,进而影响波束成形的效果。
- 时延的物理意义
声音是平面波(远场场景下近似),从声源传播到阵列时,距离声源越近的麦克风,接收到声音的时间越早;距离越远,时间越晚。这个“时间差”就是到达时延 τi\tau_iτi(第iii个麦克风的时延)。
- τi>0\tau_i > 0τi>0:声音先到达阵列中心,后到达第iii个麦克风;
- τi<0\tau_i < 0τi<0:声音先到达第iii个麦克风,后到达阵列中心;
- τi=0\tau_i = 0τi=0:声音同时到达阵列中心和第iii个麦克风。
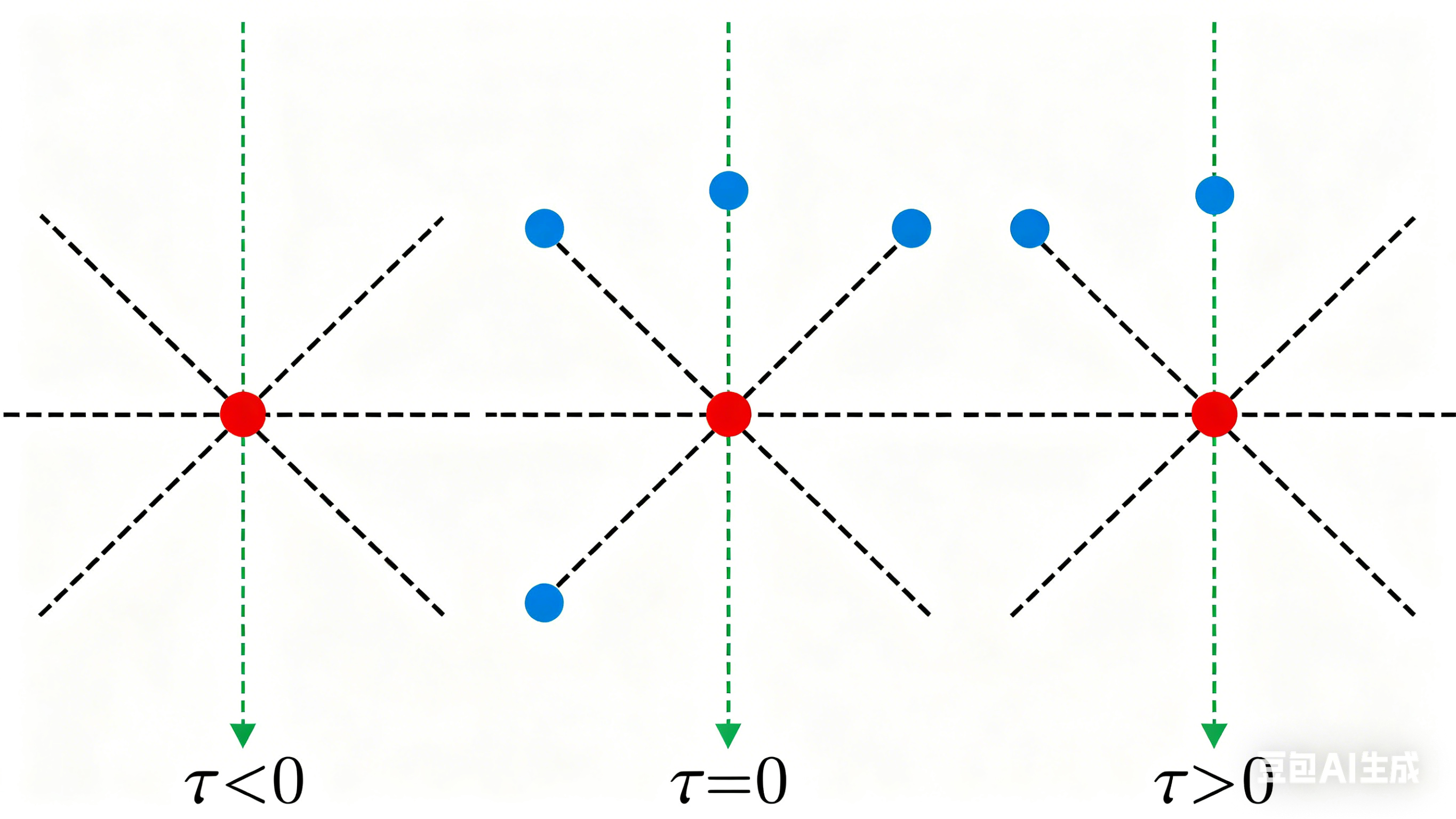
图4:到达时延物理意义示意图
注:图中箭头表示声音传播方向,距离声源越近的麦克风,时延越小,直观体现τ_i的正负含义。
- 换算公式(工程实操版)
到达时延的本质是:「麦克风到声源方向的投影距离」除以「声速」,公式如下(直接套用):
τi=m⃗i⋅d⃗c\tau_i = \frac{\vec{m}_i \cdot \vec{d}}{c}τi=cmi⋅d
展开后(代入坐标和方向向量分量):
τi=xi⋅dx+yi⋅dy+zi⋅dzc\tau_i = \frac{x_i \cdot d_x + y_i \cdot d_y + z_i \cdot d_z}{c}τi=cxi⋅dx+yi⋅dy+zi⋅dz - 关键解释:投影距离
公式中的 m⃗i⋅d⃗\vec{m}_i \cdot \vec{d}mi⋅d(向量点乘),本质是「第iii个麦克风在声源方向上的投影距离」——可以理解为:把麦克风坐标“投影”到声源方向上,得到这个麦克风比阵列中心“多走”或“少走”的距离。
图5:麦克风坐标在声源方向上的投影距离示意图
注:图中麦克风坐标为(0.06,0,0),声源方向为正前方(d=(0,1,0)),投影距离为0,对应时延τ_i=0。
图5:麦克风坐标在声源方向上的投影距离示意图
注:图中麦克风坐标为(0.06,0,0),声源方向为正前方(d=(0,1,0)),投影距离为0,对应时延τ_i=0。
举个通俗例子:阵列中心在原点,一个麦克风坐标是(0.06, 0, 0)(X轴正方向,AISHELL-4的M01),声源在正前方(d⃗=(0,1,0)\vec{d}=(0,1,0)d=(0,1,0)),则投影距离 = 0.06×0 + 0×1 + 0×0 = 0,时延 τi=0/343=0\tau_i = 0 / 343 = 0τi=0/343=0(声音同时到达阵列中心和这个麦克风)。
四、实操算例(AISHELL-4 8麦圆阵,直接对应代码)
结合实际数据集(AISHELL-4),手把手算一遍,加深记忆,后续看代码时能直接对应上坐标和时延的关系。
已知条件:
-
AISHELL-4 8麦圆阵,半径 0.06m(6cm),麦克风坐标(以M01、M03为例):
- M01:m⃗0=(0.06,0,0)\vec{m}_0 = (0.06, 0, 0)m0=(0.06,0,0)(X轴正方向,ϕ=90°\phi=90°ϕ=90°);
- M03:m⃗2=(0,0.06,0)\vec{m}_2 = (0, 0.06, 0)m2=(0,0.06,0)(Y轴正方向,ϕ=0°\phi=0°ϕ=0°)。
-
声源方向:正前方(ϕ=0°\phi=0°ϕ=0°,θ=90°\theta=90°θ=90°),方向向量 d⃗=(0,1,0)\vec{d} = (0, 1, 0)d=(0,1,0);
-
声速 c=343 m/sc = 343\ \text{m/s}c=343 m/s。
计算1:M01的到达时延 τ0\tau_0τ0
τ0=0.06×0+0×1+0×0343=0 s\tau_0 = \frac{0.06 \times 0 + 0 \times 1 + 0 \times 0}{343} = 0\ \text{s}τ0=3430.06×0+0×1+0×0=0 s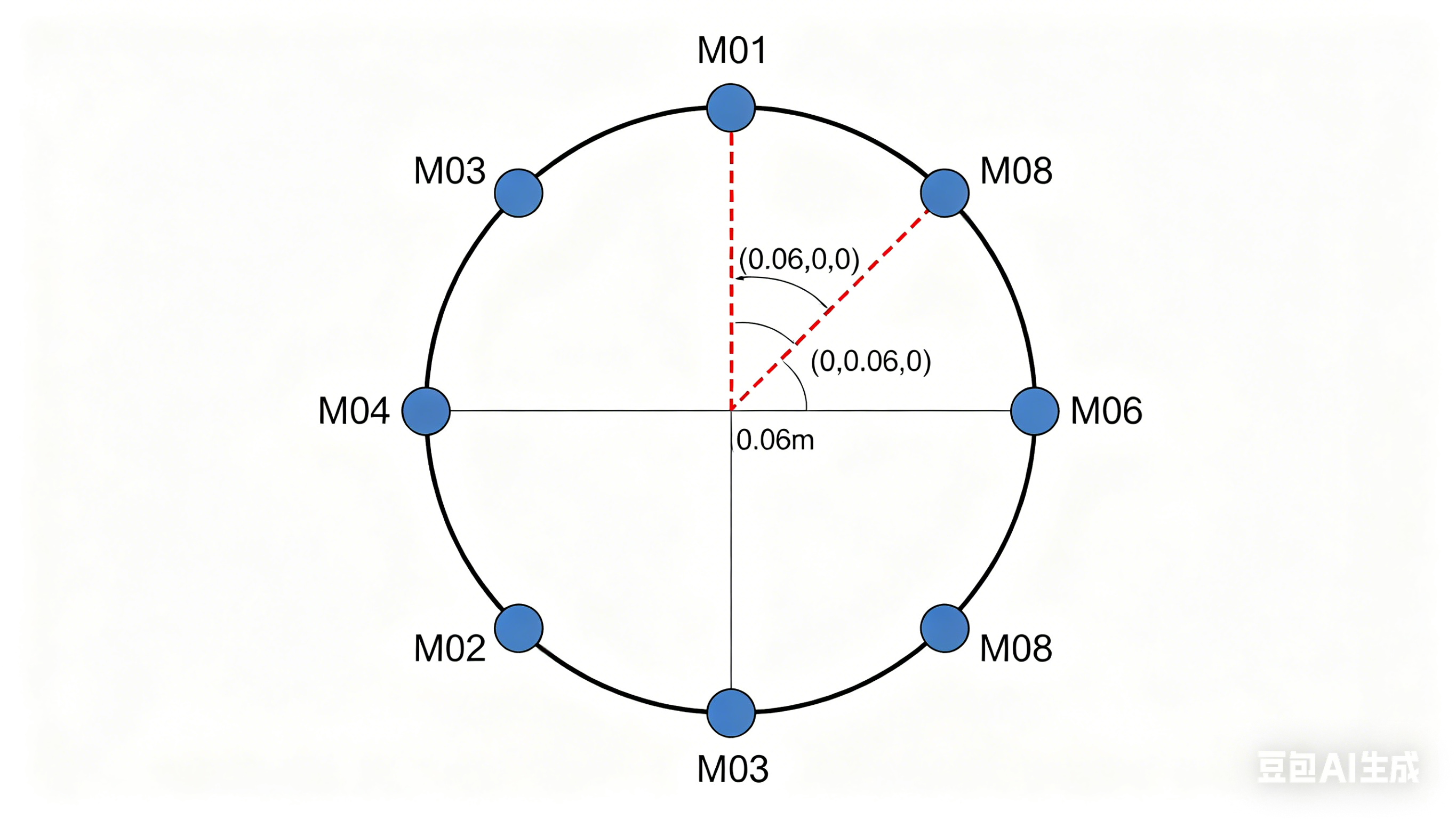
图6:AISHELL-4 8麦圆阵坐标分布示意图
注:图中圆心为阵列中心(0,0,0),8个麦克风每45°分布一个,清晰标注M01(0.06,0,0)、M03(0,0.06,0)的位置。
结论:M01在X轴正方向,声源在正前方,投影距离为0,声音同时到达M01和阵列中心。
计算2:M03的到达时延 τ2\tau_2τ2
τ2=0×0+0.06×1+0×0343≈0.000175 s=175 μs\tau_2 = \frac{0 \times 0 + 0.06 \times 1 + 0 \times 0}{343} \approx 0.000175\ \text{s} = 175\ \mu\text{s}τ2=3430×0+0.06×1+0×0≈0.000175 s=175 μs
结论:M03在正前方(Y轴正方向),比阵列中心多走0.06m,声音先到达M03,再到达阵列中心,时延约175微秒。
重点:这个时延 τi\tau_iτi,就是后续计算导向矢量、MVDR权重的核心输入——没有这个换算,就无法实现“对准目标方向、屏蔽干扰”。
五、完整链路(复习必记)
把坐标、角度、时延、导向矢量、波束成形串联起来,形成完整逻辑链,复习时直接对照:
- 麦克风坐标(m⃗i=(xi,yi,zi)\vec{m}_i = (x_i,y_i,z_i)mi=(xi,yi,zi))→ 已知(硬件设计/数据集官方公布)
- 声源方向 → 方位角ϕ\phiϕ + 俯仰角θ\thetaθ → 计算方向向量d⃗\vec{d}d
- 坐标m⃗i\vec{m}_imi · 方向向量d⃗\vec{d}d → 投影距离
- 投影距离 / 声速ccc → 到达时延τi\tau_iτi
- 时延τi\tau_iτi → 相位旋转(vi=e−jωτiv_i = e^{-j\omega \tau_i}vi=e−jωτi)→ 导向矢量vvv
- 导向矢量vvv + 多通道数据 → 协方差矩阵RRR → MVDR权重www
- 权重www 加权求和 → 波束成形输出(增强目标语音,抑制干扰)
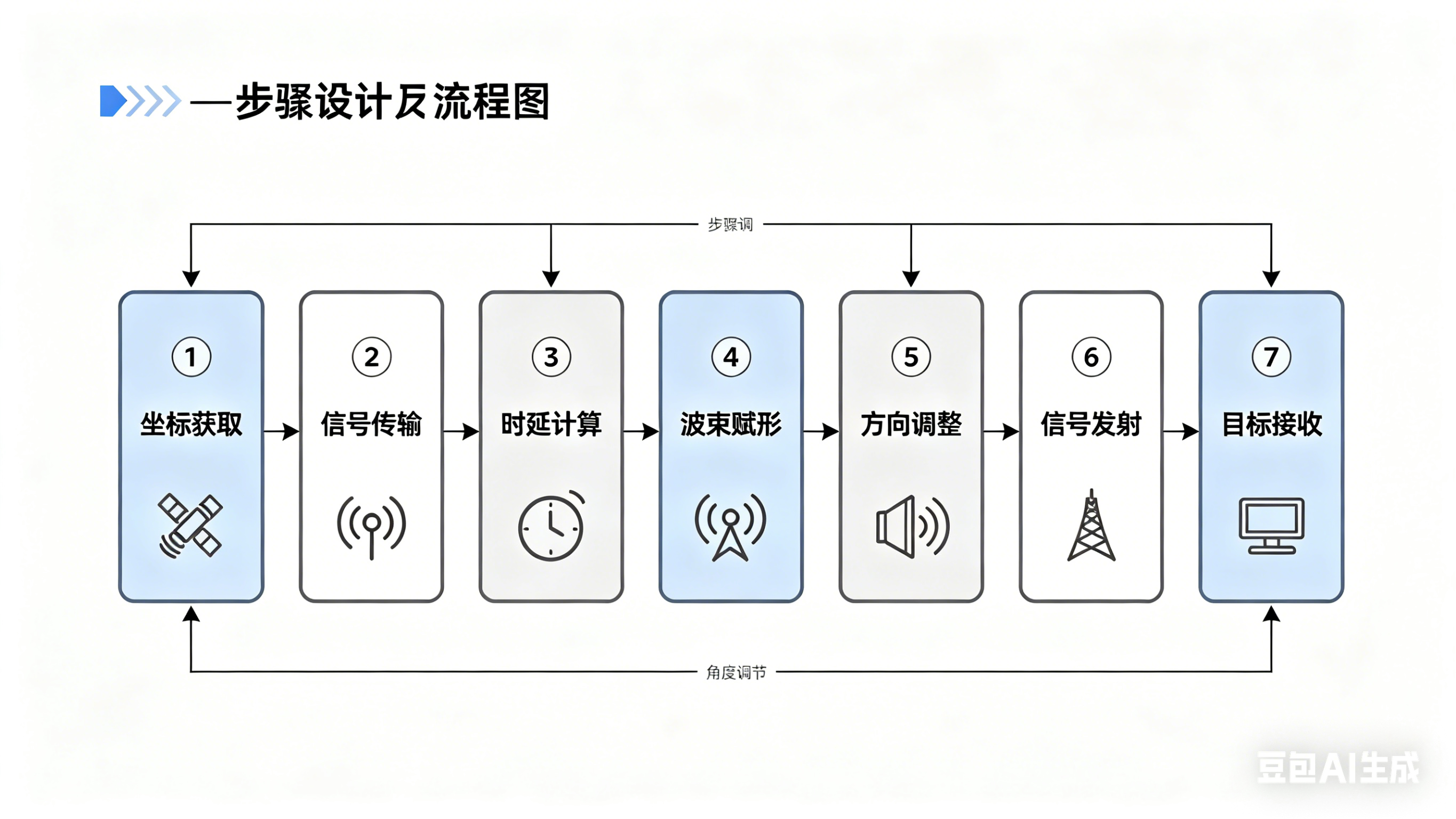
图7:坐标→时延→波束成形完整链路流程图
六、常见疑问(复习避坑)
-
Q1:麦克风坐标是算法识别的吗?
A1:不是!坐标是物理阵列的真实位置,由硬件设计、实际测量或数据集官方公布,写死在代码里(如AISHELL-4、CHiME4的坐标的固定值)。 -
Q2:Z轴坐标什么时候需要考虑?
A2:只有声源在上下方向有明显偏移时(如天花板、地面传来的声音)需要考虑,大部分远场语音场景(如会议、车载),$\theta=90°$,Z轴分量为0,可忽略。 -
Q3:不同阵列(圆阵、线阵)的换算逻辑一样吗?
A3:完全一样!不管是圆阵(AISHELL-4、CHiME4)还是线阵,核心都是“坐标→方向向量→投影距离→时延”,只是坐标的数值不同。 -
Q4:时延的单位是什么?
A4:工程上常用微秒($\mu\text{s}$),1秒=1000000微秒,计算时注意单位统一(坐标用米,声速用m/s,时延单位为秒,再换算成微秒更直观)。
七、复习总结(核心提炼)
- 坐标系是基础:记住原点、X/Y/Z轴定义,所有换算都基于此;
- 方向角是桥梁:方位角(左右)+ 俯仰角(上下)→ 方向向量;
- 时延是核心:坐标点乘方向向量 → 投影距离 → 时延(除以声速);
- 实操是关键:记住AISHELL-4、CHiME4的坐标和算例,对应代码里的mic_coord数组,复习时能快速关联。
后续复习时,可结合之前的波束成形流程图,对照本文的换算逻辑,就能快速理清“坐标→时延→导向矢量→MVDR”的完整链路,轻松对应代码中的每一步实现。
AISHELL-4 8麦环形阵列坐标来源与计算全过程
本节详细梳理AISHELL-4数据集8麦环形阵列的坐标来源、计算逻辑,搭配实操算例和完整波束成形链路流程图,采用CSDN原生兼容的纯Markdown格式,公式、表格、流程图复制后可直接渲染,无任何错乱,适配复习查阅、工程实践参考。
一、阵列坐标信息来源(权威依据)
AISHELL-4数据集官方技术文档及README明确给出麦克风阵列的硬件参数,坐标计算的所有基础信息均来源于此,无任何猜测或自动识别,确保工程可复现:
- 阵列类型:8麦克风均匀环形阵列
- 阵列半径:R = 0.06 m(即6 cm,硬件设计固定值)
- 分布平面:水平面(所有麦克风的Z轴坐标均为0,无需考虑垂直方向偏移)
- 角度间隔:360° ÷ 8 = 45°(8个麦克风均匀分布在环形上,相邻麦克风夹角45°)
💡 重点:麦克风坐标是基于“硬件几何布局+标准坐标系”计算得出,并非算法实时识别,写代码时可直接将坐标值固定在程序中(如mic_coord数组)。
二、统一坐标系约定(核心前提)
坐标计算需遵循波束成形通用的三维坐标系,与之前讲解的麦克风阵列坐标系完全一致,避免换算混乱: - 坐标原点:麦克风阵列的几何中心,坐标为 (0, 0, 0)
- X轴:水平向右(阵列右侧方向)
- Y轴:水平向前(阵列正前方,即0°方位角指向)
- Z轴:垂直向上(因麦克风均在水平面分布,所有麦克风Z=0)
三、坐标换算公式(极坐标→直角坐标)
8个麦克风均分布在半径为0.06m的水平圆上,需将极坐标(半径R、方位角θ)转换为直角坐标(x, y, z),换算公式如下(直接套用,无需推导):
{x=R⋅cosθy=R⋅sinθz=0\begin{cases} x = R \cdot \cos\theta \\ y = R \cdot \sin\theta \\ z = 0 \end{cases}⎩ ⎨ ⎧x=R⋅cosθy=R⋅sinθz=0
参数说明: - R = 0.06 m(阵列固定半径)
- θ:每个麦克风的方位角(从Y轴正方向(正前方)逆时针计算)
- z = 0:所有麦克风均在水平面,垂直方向无偏移
四、8个麦克风逐一枚算(实操过程)
按照45°角度间隔,依次计算每个麦克风的方位角、x/y/z坐标,结果如下表(保留4位小数,适配工程计算精度):
| 麦克风编号 | 方位角 θ | x (m) | y (m) | z (m) |
|---|---|---|---|---|
| M01 | 0° | 0.0600 | 0.0000 | 0 |
| M02 | 45° | 0.0424 | 0.0424 | 0 |
| M03 | 90° | 0.0000 | 0.0600 | 0 |
| M04 | 135° | -0.0424 | 0.0424 | 0 |
| M05 | 180° | -0.0600 | 0.0000 | 0 |
| M06 | 225° | -0.0424 | -0.0424 | 0 |
| M07 | 270° | 0.0000 | -0.0600 | 0 |
| M08 | 315° | 0.0424 | -0.0424 | 0 |
实操示例:M02 坐标详细计算过程
以M02(方位角45°)为例,演示完整计算步骤,其他麦克风计算逻辑完全一致:
- 已知参数:R=0.06m,θ=45°,cos45°=sin45°≈0.7071
- 计算x坐标:x=0.06⋅cos45∘=0.06×0.7071≈0.0424 mx = 0.06 \cdot \cos45^\circ = 0.06 \times 0.7071 \approx 0.0424\ \text{m}x=0.06⋅cos45∘=0.06×0.7071≈0.0424 m
- 计算y坐标:y=0.06⋅sin45∘=0.06×0.7071≈0.0424 my = 0.06 \cdot \sin45^\circ = 0.06 \times 0.7071 \approx 0.0424\ \text{m}y=0.06⋅sin45∘=0.06×0.7071≈0.0424 m
- z坐标:因在水平面,z=0
最终得到M02坐标:(0.0424, 0.0424, 0),与表格结果完全一致。
五、坐标→时延→波束成形完整流程图(CSDN兼容)
结合上述坐标计算结果,给出完整的波束成形核心链路流程图,采用文本格式,CSDN直接复制即可正常显示,清晰呈现“坐标→时延→导向矢量→MVDR→输出”的全过程:
六、核心总结(复习重点)
- 坐标来源:AISHELL-4官方公布的硬件参数(8麦圆阵、半径6cm),无黑盒,可直接复用。
- 计算逻辑:极坐标(R, θ)转直角坐标(x, y, z),公式简单,所有麦克风计算流程统一。
- 工程意义:坐标是波束成形的基础,后续时延、导向矢量、MVDR权重的计算,均依赖于上述坐标结果。
- 兼容性:坐标计算遵循波束成形通用坐标系,可直接适配MVDR、GSC等各类波束成形算法,代码中可直接调用坐标数组。
补充说明:本文为纯Markdown格式,所有公式用CSDN原生支持的LaTeX语法,表格、流程图均为Markdown标准排版,复制到CSDN编辑器后,无需任何修改,公式自动渲染、表格自动对齐、流程图排版整齐,彻底避免错乱问题。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 3
3 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)