陈刚直言|到底什么是工业场景?
在制造业数字化转型的语境中,“场景”已经成为一个高频词汇。政策文件在讨论典型场景,软件厂商强调面向场景,企业也在梳理自身业务场景。然而,一旦进一步追问:什么是工业场景?答案往往并不一致。
在实际工程与应用语境中,所谓“场景”的指代并不稳定:既可以指三维车间模型,也可以指一段业务流程,亦可能被用于描述一组传感器配置,或跨车间协同的整体方案。同一术语对应多类对象,其结果并非概念扩展,而是语义失稳,进而导致系统难以统一建模与处理。
这背后反映的,并不是理解能力不足,而是一个长期存在的问题:工业场景尚未形成可被工程系统直接使用的结构化表达方式。
一、问题不在“是否理解场景”,而在“能否结构化表达场景”
过去几十年,工业界与学术界均尝试对“场景”进行界定。
-
部分研究将其视为交互序列,强调事件之间的时间关系;
-
部分方法将其作为设计阶段的描述对象,用于表达系统预期行为;
-
在自动驾驶等领域,也形成了从抽象场景到具体场景的分层建模方法。
这些方法在各自语境下均具备价值,但存在一个共同局限,它们可以在一定程度上描述场景,但并未回答一个更基础的问题:场景究竟由哪些要素构成,从而也无法形成可被人机共同理解的结构化表达。
因此,场景可以被叙述,但难以被系统消费;可以用于沟通,但难以用于执行;可以支持项目交付,但难以沉淀为可复用能力。
工业软件长期依赖项目交付,这一模式本身正是场景难以结构化与能力难以复用的重要原因之一。同时,这种依赖关系又反过来进一步固化了场景无法标准化表达的问题,形成了一个典型的负面循环。
二、工业场景难以定义的三个原因
从工程角度看,这一问题主要源于三个方面。
1. 工业系统缺乏极简表达
场景必然发生在某个工业系统之中。但工业系统本身高度复杂:设备、产线、车间与工厂之间存在多层结构,不同行业在运行机理上差异显著。如果系统本体无法被统一表达,场景就缺乏稳定的语义承载基础。
2. 系统与场景长期混用
在实践中,两者往往未被严格区分。
系统回答的是:
-
有哪些对象
-
对象如何组织
-
会发生哪些事件
-
遵循什么规则
-
可以执行哪些流程
场景回答的是:
-
在什么条件下发生
-
为何发生
-
由谁负责
-
人与系统如何分工
-
如何完成一次闭环
系统描述“存在”,场景描述“运行”。这里的“存在”并非静态状态,而是指系统所具备的结构与能力边界;“运行”则指在特定工作域与条件下的一次具体执行实例。
3. 业务语义长期隐式存在
在多数工业系统中,以下信息未被显式表达:
-
目标(为何执行)
-
角色(定义责任的结构性分配)
-
自治(定义人类与系统之间的决策权分配)
这些信息往往分散在流程设计或实现逻辑中,能够被人理解,但难以被工程系统识别。
三、用SECP 表达工业系统
要定义场景,必须先定义系统。需要说明的是,SECP并非工业系统本身,而是对工业系统进行抽象与表达的统一语义模型,它所描述的是工业系统的“结构形态”,而非其具体实例。
工业系统在语义层可以被压缩为四类要素:
-
S(Structure)结构:实体及其关系
-
E(Event)事件:状态变化
-
C(Configuration)配置:规则与约束
-
P(Process)流程:执行路径
四者构成一个最小闭环:S → E → C → P
这一表达不是执行顺序,而是结构依赖关系的抽象表达。
四、系统与场景的范畴分离
基于SECP,可以明确区分:系统是能力结构,场景是运行实例。系统定义能力边界,场景描述一次具体执行过程。
需要进一步说明的是,这里的“能力边界”并非黑盒意义上的输入输出封装,而是通过结构(S)、规则(C)与流程(P)显式表达的能力范围;而“执行过程”也并非黑盒运行,而是基于该结构展开的一次具体运行实例。
五、一个必须先明确的前提:工作域(Working Domain)
在给出场景结构定义之前,必须先引入一个前提条件:工作域(Working Domain)——场景发生的物理与组织边界。
需要说明的是,这里的“边界”指的是场景发生的空间与组织范围,而非系统所具备的能力边界。前者回答“在哪里发生”,后者回答“能做什么”,二者属于不同层面的约束。
没有工作域,场景就缺乏坐标系:
-
S(结构)的边界无法确定
-
E(事件)的触发范围无法界定
-
P(流程)的执行路径无法落地
因此必须明确:工作域不是第8个维度,而是七维结构成立的前提条件。
六、显式引入G / R / A
在SECP基础上,场景还必须引入三个维度:
-
G(Goal)目标:定义成功标准
-
R(Role)角色:定义责任分配
-
A(Autonomy)自治:定义人机决策边界
G用于判定场景是否完成,必须具备可度量性与可验证性(例如“缺陷率 < 0.8%”,而非“提升质量”)。
R定义责任的结构性分配,而非简单的岗位或权限划分,其关注的是责任绑定关系,而不是权限配置。
A定义人类与系统之间的决策边界,从而形成不同的人机协作模式(*注:通常可表示为从 L1(人工执行)到 L5(完全自主)的分级体系,此处为类比表达,并不对应自动驾驶等行业的具体标准)。
七、工业场景的结构化定义
由此得到:Scenario = ⟨S, E, C, P, G, R, A⟩
其中各维度构成结构化要素集合,其排列顺序仅为表达约定,不表示执行顺序或因果依赖关系。七个维度形成一个最小完备集,即去掉任何一个维度,场景定义都不再成立。
八、一个极简案例(用于理解结构)
以“压铸机模温超限预警”为例:
-
S:压铸机、模具
-
E:模具温度超限
-
C:温度范围
-
P:检测 → 预警 → 处理
-
G:缺陷率 < 0.8%
-
R:系统与操作员责任分配
-
A:L2(人决策)
该示例仅用于说明结构映射关系,并不替代完整的场景定义。基于工作域的层级划分,场景可在设备级、产线级、车间级与工厂级等不同尺度上被定义,从而形成跨层级的一致结构表达。
九、场景的三态:定义态、实例态、运行态
在工程实践中,仅有结构定义仍然不够,还需要区分场景的三种状态:
-
SDS(Scenario Definition Schema,定义态)→ 描述场景的标准结构(七维定义)
-
SIP(Scenario Instance Profile,实例态)→ 在具体工作域中绑定设备、人员与配置
-
SRP(Scenario Runtime Parameter,运行态)→ 在运行过程中,对实例中的要素赋予具体数值与状态(即参数化结果)
需要说明的是,前文所称“场景是运行实例”,是在与“系统”进行范畴区分时的表达;而这里的三态划分,则是针对同一场景在工程实现过程中的不同状态描述,场景三态中真正强调的是定义可复用,实例可部署,运行可演化。
十、人因与人机工效约束
至此,场景的结构表达(含工作域与三态)已经完整。但要使该结构在真实工业AI系统中稳定运行,还必须补充一层常被忽略的约束。
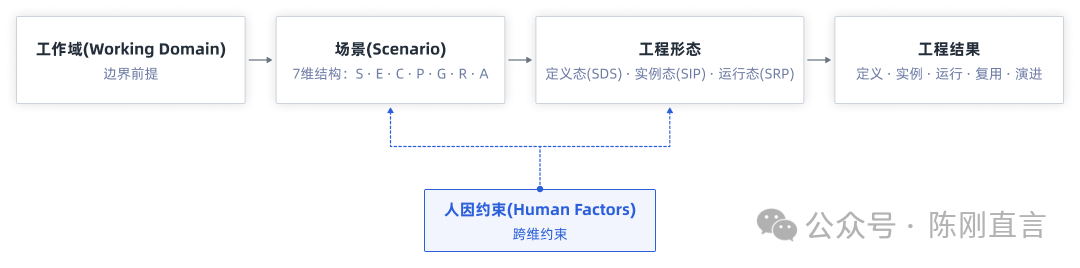
工业场景的统一结构表达与工程形态(Working Domain × ⟨S,E,C,P,G,R,A⟩ ×SDS/SIP/SRP × Human Factors)
场景始终与人相关,但“人”不等同于“角色”。角色刻画责任分配,而执行质量与认知可行性属于人因与人机工效(Human Factors and Ergonomics)范畴。
需要特别强调的是:角色定义的是“谁负责”,而人因关注的是“能否胜任”。
七维结构保证场景定义完整,人因约束保证场景具备工程可运行性。是否能够理解系统输出,并在具体情境下做出正确使用与判断,是决定场景能否稳定运行的关键。
点击下方链接阅读全文:
陈刚直言|到底什么是工业场景?

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 7
7 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)