【技术追踪】MRI 造影增强动力学世界模型(CVPR-2026)
已经开始玩世界模型了么!MRI × 世界模型:面向无造影剂成像动态演化
论文:MRI Contrast Enhancement Kinetics World Model
代码:https://github.com/DD0922/MRI-Contrast-Enhancement-Kinetics-World-Model
0、摘要
临床 MRI 对比剂采集面临信息获取效率低下的问题,表现为风险高、成本高的采集协议与固定且稀疏的采集序列之间的不匹配。应用世界模型模拟人体内的对比剂增强动力学,可实现无对比剂的连续动态模拟。(研究背景:无造影剂探索)
然而,MRI 采集中的低时间分辨率限制了世界模型的训练,导致只能获得稀疏采样的数据集。直接训练生成模型来捕捉动力学过程会带来两个局限性(当前挑战):
(a) 由于缺乏缺失时间点的数据,模型容易过拟合不相关特征,导致内容失真;
(b) 由于缺乏连续的时间监督,模型无法学习随时间变化的连续动力学规律,造成时间不连续性;
本文首次提出了 MRI 对比增强动力学世界模型(MRI CEKWorld)及时空一致性学习(STCL)。
针对局限性 (a),基于患者层面结构在增强过程中保持一致的空间规律,提出潜在对齐学习(LAL),通过构建患者特定模板,约束内容与该模板对齐;
针对局限性 (b),基于动力学遵循一致平滑趋势的时间规律,提出潜在差异学习(LDL),通过插值扩展未观测的时间间隔,并约束插值序列之间在潜在空间中的平滑变化;
在两个数据集上的大量实验表明,所提出的 MRI CEKWorld 能够生成更真实的内容和动力学特征。
1、引言
1.1、研究意义与当前挑战
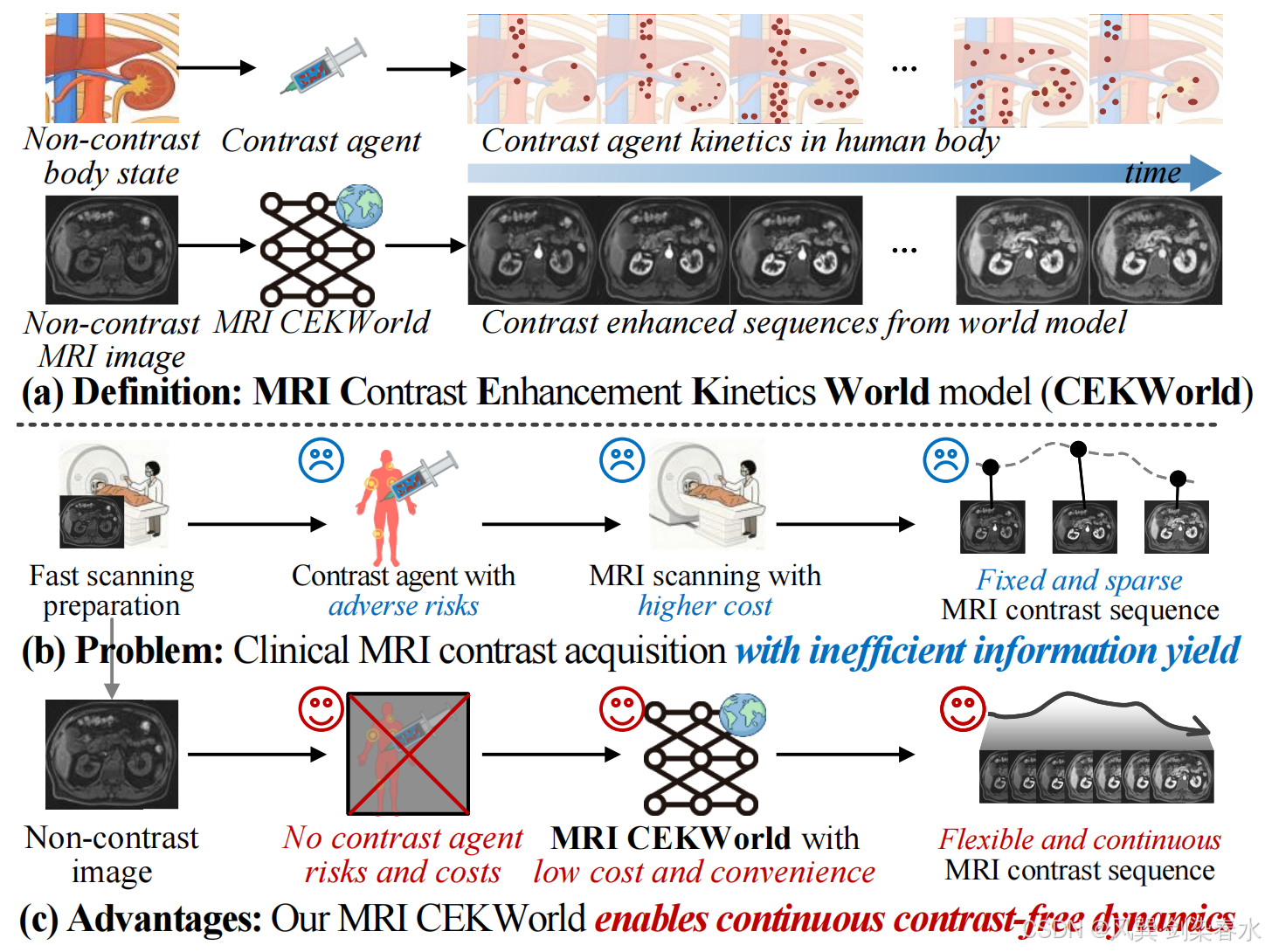
(1)世界模型通过学习深度神经表示来模拟物理系统的动力学过程,为建模 MRI 对比增强动力学提供了一种极具前景的方向。如 图 1 所示,此类模型能够直接从初始的非对比 MRI 图像中推断对比剂的药代动力学演变过程,从而估算任意时间点的对比剂分布,并合成相应的对比增强 MRI 图像,其具有两大优势:无对比剂 MRI 成像范式以及高时间分辨率建模;(什么是世界模型,它能干什么)
Figure 1 | :(a) 任务: MRI CEKWorld 生成符合人体注射造影剂后动力学特征的增强序列;(b) 问题: 临床造影剂 MRI 采集存在信息获取效率低下、不良风险及成本较高的问题,且序列固定且稀疏;(c ) 优势: 所提出的 MRI CEKWorld 可实现无造影剂连续动态成像,无造影剂相关风险、成本低廉且操作便捷;
(2)MRI 采集的时间分辨率较低,直接在稀疏采样的数据集上训练生成模型,存在两个根本性局限:(a) 空间维度的内容失真: 由于缺失时间点处缺乏真实帧,模型无法获得关于真实解剖状态的任何监督。一旦发生过拟合,就会产生如 图 2(a) 所示的失真,包括结构变形和器官错位 ;(b) 时间维度的不连续性:由于缺乏连续采样的数据,模型无法学习对比剂的真实动力学规律,导致与时间条件不匹配以及相邻帧之间的时间跳跃,如 图 2(b) 所示;(MRI 数据本身为世界模型训练带来的挑战)
Figure 2 | :局限性: MRI 采集过程中诱导的低时间分辨率在 MRI CEKWorld 中会导致 (a) 内容失真及 (b) 时间维度上的不连续性;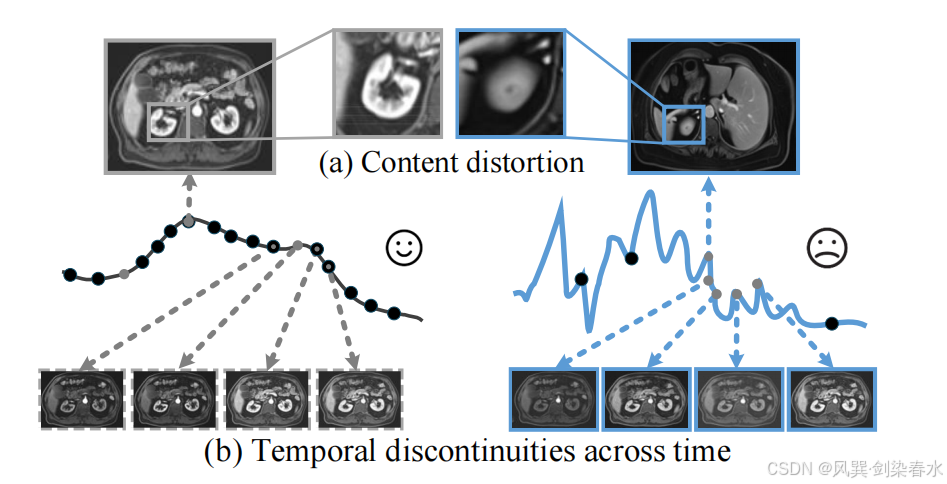
1.2、本文贡献
(1)首次提出 MRI CEK-World 模型,用于模拟人体内对比剂的动力学过程,实现无需对比剂的连续动态模拟;
(2)提出时空一致性学习(STCL),通过时空一致的生理学规律,解决因采集时间分辨率低而导致的内容真实性与时间连续性问题;
(3)提出潜在对齐学习(LAL),为每次生成构建显式的患者级模板并对齐生成内容,从而保持内容的一致性与真实性;
(4)提出潜在差异学习(LDL),扩展未观测的时间区间,并约束连续时间点之间的变化,确保时间演化的平滑性;
2、方法
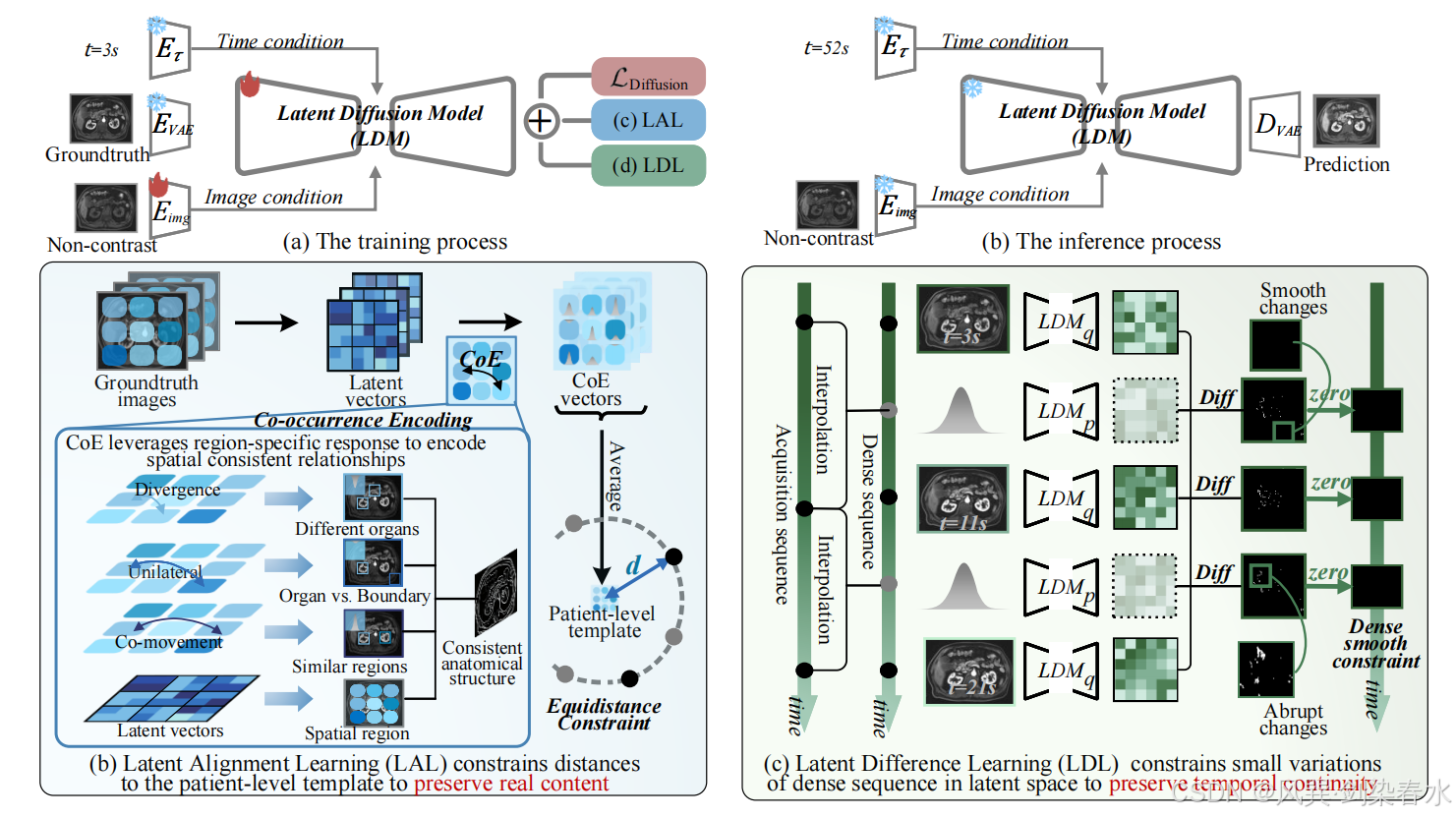
如 图 3 所示,本文的时空一致性学习通过以下方式实现 MRI 造影剂动力学世界模型(第 2.1 节所述):在每个时间点将空间信息约束至患者级模板以保持内容真实性(LAL ,参见第 2.2 节),并在密集插值序列中约束潜在表征保持平滑性(LDL,参见第 2.3 节)。
Figure 3 | MRI CEKWorld 的概述框架:局限性: (a) 和 (b) 展示了训练与推理过程;(c ) LAL 捕捉区域间共现关系,并通过与患者级模板对齐来确保解剖学一致性。(d) LDL 在潜在空间中构建密集时间序列,并对相邻时刻施加二阶差分(标记为 Diff \text{Diff} Diff )以实现平滑演化( p p p 和 q q q 表示推理结果);
2.1、公式化
MRI 造影剂动力学世界模型被建模为图像时间序列模型,其基于平扫图像 I p , 0 \mathcal{I}_{p,0} Ip,0,预测任意时间 t t t 处的增强 MRI 图像 I ( t ) \mathcal{I}(t) I(t)。
数据集。 由于 MRI 采集的时间分辨率较低,数据集在时间维度上是稀疏采样的。对于每位患者 p p p,将图像-时间对记为 D p = { ( I p , i , t p , i ) } i = 0 T p \mathcal{D}_p = \{{(\mathcal{I}_{p,i}, t_{p,i})}\}_{i=0}^{T_p} Dp={(Ip,i,tp,i)}i=0Tp,其中 I p , i \mathcal{I}_{p,i} Ip,i 表示在时间 t p , i t_{p,i} tp,i 采集的图像, T p T_p Tp 表示采集的时间点总数。完整数据集定义为 D = { D p ∣ p = 1 , 2 , … , P } \mathcal{D} = \{{\mathcal{D}_p \mid p = 1,2,\dots,P}\} D={Dp∣p=1,2,…,P},其中 P P P 为患者总数。
训练。 该模型旨在学习从初始平扫图像 I p , 0 \mathcal{I}_{p,0} Ip,0 与连续时间变量 t t t 到对应增强 MRI 图像 I p ( t ) \mathcal{I}_p(t) Ip(t) 的映射关系。
如 图 3 (a) 所示, t t t、 I p , 0 \mathcal{I}_{p,0} Ip,0 与 I p ( t ) \mathcal{I}_p(t) Ip(t) 被分别编码。真实编码器 E g t E_{gt} Egt 与变分自编码器(VAE)中使用的编码器相同,用于对增强 MRI 图像 I p ( t ) g t \mathcal{I}_p(t)_{gt} Ip(t)gt 进行编码。时间条件编码器 E t E_t Et 利用 CLIP 处理时间变量,即造影剂注射后的持续时间,将时间文本信息转换为高维特征,从而指导模型生成特定时间点的增强特征。图像条件编码器 E i m g E_{img} Eimg 通过零卷积对平扫图像 I p , 0 \mathcal{I}_{p,0} Ip,0 进行编码,并将其加入到潜扩散模型的网络层中,作为引导预测的提示信息。
本文采用空间损失、时间损失和扩散损失来对生成结果进行正则化。前两种损失将分别在 3.2 节和 3.3 节中介绍。扩散损失 L Diffusion = E t , t , ϵ [ ∣ ∣ ϵ − ϵ θ ∣ ∣ 2 ] \mathcal{L}_{\text{Diffusion}}=\mathbb{E}_{t,t,\epsilon} \left[ \left||\epsilon - \epsilon_\theta\right||^2 \right] LDiffusion=Et,t,ϵ[∣∣ϵ−ϵθ∣∣2] 用于约束噪声预测的精度。在此, t t t 表示去噪时间步。令 M θ \mathcal{M}_\theta Mθ 表示由参数 θ θ θ 定义的 MRI 增强动力学世界模型:
I ^ p ( t ) = M θ ( I p , 0 , t ) , t ∈ R + (1) \hat{\mathcal{I}}_p(t)=\mathcal{M}_\theta(\mathcal{I}_{p,0}, t),\quad t \in \mathbb{R}^+ \tag{1} I^p(t)=Mθ(Ip,0,t),t∈R+(1)
推理。 训练完成后,优化后的模型 M θ ∗ \mathcal{M}_{\theta^*} Mθ∗ 以平扫图像 I p , 0 \mathcal{I}_{p,0} Ip,0 和时间 t t t 为输入,预测增强 MRI 图像: I ^ p ( t ) = M θ ∗ ( I p , 0 , t ) \hat{\mathcal{I}}_p(t)=\mathcal{M}_{\theta^*}(\mathcal{I}_{p,0}, t) I^p(t)=Mθ∗(Ip,0,t)。在 图 3 (b) 中,预测结果经 U-Net 处理后,由图像解码器 D i m g \mathcal{D}_{img} Dimg 解码,将潜变量转换至像素空间。
2.2、基于真实内容的潜空间对齐学习
如 图 3 ( c ) 所示,在解剖结构一致性的基础上,本文利用不同区域在造影剂信号响应模式上的差异,将这些区域之间的波动关系编码为数值统计模板,并利用该模板约束生成结果,使其符合这种波动关系,从而抑制畸变。
共现编码通过协方差矩阵实现,用于计算解剖结构的空间共现模式。区域内的协同运动对应相似区域,而区域间的单向发散对应边界分离,以此表征患者一致的空间内容。潜表征 x ^ 0 \hat{x}_0 x^0 通过利用扩散模型的逆过程提取得到:它使用模型预测的噪声 ϵ ϵ ϵ 和含噪样本 x t x_t xt,为后续的统计计算与约束提供高质量、结构化的潜空间表示。
α ˉ t = ∏ s = 1 t α s \bar{\alpha}_t = \prod_{s=1}^t \alpha_s αˉt=∏s=1tαs 表示 α α α 在 t t t 个扩散步骤中的累积系数, x t x_t xt 表示经过 τ τ τ 个去噪步骤后的含噪样本,其表达式为: x ^ 0 = x τ − 1 − α ˉ τ ⋅ ϵ α ˉ τ \hat{x}_0 = \frac{x_\tau - \sqrt{1-\bar{\alpha}_\tau} \cdot \epsilon}{\sqrt{\bar{\alpha}_\tau}} x^0=αˉτxτ−1−αˉτ⋅ϵ。(标准预测公式)随后,在潜空间中得到预测序列 x ^ 0 = { x ^ 0 t ∈ R c × h × w } t = 1 T \hat{x}_0 = \{{\hat{x}_{0t} \in \mathbb{R}^{c \times h \times w}}\}_{t=1}^T x^0={x^0t∈Rc×h×w}t=1T,其中 c c c 为通道数, h h h 和 w w w 分别为 x ^ 0 \hat x_0 x^0 的高度与宽度。本文将每个时间点(不同去噪时间步)的 x ^ 0 t \hat x_{0t} x^0t 展平为 X t ∈ R c × s X_t \in \mathbb{R}^{c \times s} Xt∈Rc×s(其中 s = h ⋅ w s=h⋅w s=h⋅w),并沿空间维度进行中心化处理: X t c = X t − 1 s ∑ s i = 1 s X t X_t^c = X_t - \frac{1}{s} \sum_{s_i=1}^s X_t Xtc=Xt−s1∑si=1sXt。(减去空间均值)这一步消除了空间均值偏差,使协方差能够反映特征的真实分布形态。每个采集时间点 t t t 的协方差矩阵计算为: Σ t = 1 S − 1 X t c ( X t c ) ⊤ \Sigma_t = \frac{1}{S-1} X_t^c (X_t^c)^\top Σt=S−11Xtc(Xtc)⊤,随后通过收缩正则化与微小抖动项确保其正定性,得到正则化协方差矩阵: Σ ~ t = ( 1 − γ ) Σ t + γ I + ε I \tilde{\Sigma}_t = (1 - \gamma)\Sigma_t + \gamma I + \varepsilon I Σ~t=(1−γ)Σt+γI+εI,其中 γ γ γ 控制收缩强度, I I I 为单位矩阵, ε ε ε 为微小抖动项。
通过计算各时间点协方差矩阵的均值得到患者级模板,该模板在患者解剖结构不变的空间规律下,呈现更稳定的患者级空间特征。为保证数值稳定性并在训练优化中保持正定性,本文通过 log–Cholesky 参数化将每个潜协方差 Σ t \Sigma_t Σt 映射为欧几里得向量。令 L t = chol ( Σ t ) L_t = \text{chol}(\Sigma_t) Lt=chol(Σt);提取 lower t = vec ( tril ( L t , − 1 ) ) \text{lower}_t = \text{vec}(\text{tril}(L_t, -1)) lowert=vec(tril(Lt,−1)) 与 logdiag t = log ( diag ( L t ) ) \text{logdiag}_t = \log(\text{diag}(L_t)) logdiagt=log(diag(Lt)),并构造 z t = [ lower t ; logdiag t ] z_t = [\text{lower}_t; \text{logdiag}_t] zt=[lowert;logdiagt]。求平均得到患者级模板向量 z ˉ = 1 T ∑ t = 1 T z t \bar{z} = \frac{1}{T}\sum_{t=1}^T z_t zˉ=T1∑t=1Tzt,本文随后将其用作模板表示。
等距约束通过使不同时间点的 z t z_t zt 与模板 z ˉ \bar{z} zˉ 保持相同距离,来约束各时间点的 z t z_t zt 与模板保持一致。该约束不仅保证了统计一致性,还能保留时间点之间合理的动态变化,使生成序列在稀疏监督下具备真实的空间内容。基于等距约束的空间损失由距离 d t 2 = ∣ ∣ z t − z ˉ ∣ ∣ 2 2 d_t^2 = ||z_t - \bar{z}||_2^2 dt2=∣∣zt−zˉ∣∣22 定义如下(所有患者所有时间点距离之和):
L Spatial = 1 P ∑ p = 1 P 1 T p ∑ t = 1 T p ( d p , t 2 ) . (2) \mathcal{L}_{\text{Spatial}} = \frac{1}{P} \sum_{p=1}^P \frac{1}{T_p} \sum_{t=1}^{T_p} \left(d_{p,t}^2\right). \tag{2} LSpatial=P1p=1∑PTp1t=1∑Tp(dp,t2).(2)其中 P P P 为患者总数, T p T_p Tp 为第 p p p 位患者的采集时间点总数。
2.3、面向连续性的潜空间差异学习
如 图 3 (d) 所示,潜空间差异学习(LDL)通过插值在潜空间中生成未观测到的中间时间点的预测结果,并对插值得到的稠密序列施加平滑性约束,以保证语义连续性,实现时间维度的平滑过渡。
本文在潜空间中插入中间点以生成稠密序列。原始稀疏采集时间点集合由实际观测到的时间值构成,定义为: T acq = { t acq , 0 , t acq , 1 , … , t acq , N − 1 } T_{\text{acq}} = \{{t_{\text{acq},0}, t_{\text{acq},1}, \dots, t_{\text{acq},N-1}}\} Tacq={tacq,0,tacq,1,…,tacq,N−1} 其中 N N N 为原始采集时间点的数量; t acq , i t_{\text{acq},i} tacq,i 表示第 i i i 个原始观测的绝对时间,并按采集时间排序。对于每一对相邻的原始观测 ( t acq , i , t acq , i + 1 ) (t_{\text{acq},i}, t_{\text{acq},i+1}) (tacq,i,tacq,i+1)( i ∈ [ 0 , N − 2 ] i \in [0, N-2] i∈[0,N−2]),设 K i K_i Ki 为插入的中间点数量( K i ≥ 1 K_i≥1 Ki≥1),在时间区间 Δ t i = t acq , i + 1 − t acq , i \Delta t_i = t_{\text{acq},i+1} - t_{\text{acq},i} Δti=tacq,i+1−tacq,i 内进行均匀插值,确保中间点严格位于 t acq , i t_{\text{acq},i} tacq,i 与 t acq , i + 1 t_{\text{acq},i+1} tacq,i+1 之间。第 i i i 对相邻点之间第 k k k 个中间点( k ∈ [ 1 , K i ] k∈[1,K_i] k∈[1,Ki])的时间值为: t mid , i , k = t acq , i + k K i + 1 ⋅ Δ t i t_{\text{mid},i,k} = t_{\text{acq},i} + \frac{k}{K_i+1} \cdot \Delta t_i tmid,i,k=tacq,i+Ki+1k⋅Δti。稠密时间序列 T d e n s e T_{dense} Tdense 为原始观测与所有中间点的并集,并按时间排序(差值完成的序列): T dense = T acq ∪ ( ⋃ i = 0 N − 2 { t mid , i , 1 , … , t mid , i , K i } ) T_{\text{dense}} = T_{\text{acq}} \cup \left( \bigcup_{i=0}^{N-2} \{{t_{\text{mid},i,1}, \dots, t_{\text{mid},i,K_i}} \}\right) Tdense=Tacq∪(⋃i=0N−2{tmid,i,1,…,tmid,i,Ki})
潜空间中的稠密预测序列由所有稠密时间点的干净预测构成,既包括锚定在真实采集时间的输出,也包括在插入的中间时间由噪声生成的输出。对于每个观测到的采集点 t acq , i t_{\text{acq},i} tacq,i,本文从经过 τ τ τ 步去噪后的对应含噪样本 x τ , acq , i x_{τ,\text{acq},i} xτ,acq,i 中恢复其潜向量 x ^ 0 , acq , i \hat{x}_{0,\text{acq},i} x^0,acq,i: x ^ 0 , acq , i = x τ , acq , i − 1 − α ˉ τ acq , i ϵ θ α ˉ τ acq , i \hat{x}_{0,\text{acq},i} = \frac{x_{\tau,\text{acq},i} - \sqrt{1-\bar{\alpha}_{\tau_{\text{acq},i}}} \epsilon_\theta}{\sqrt{\bar{\alpha}_{\tau_{\text{acq},i}}}} x^0,acq,i=αˉτacq,ixτ,acq,i−1−αˉτacq,iϵθ。对于每个插入的中间时间点 t mid , j t_{\text{mid},j} tmid,j,本文在分配的时间步 τ dense , j \tau_{\text{dense},j} τdense,j 采样含噪潜量 x τ , mid , j ∼ N ( 0 , I ) x_{\tau,\text{mid},j} \sim \mathcal{N}(0, I) xτ,mid,j∼N(0,I),并通过应用潜扩散模型的去噪调度得到其潜预测: x ^ 0 , mid , j = p θ ( x τ , mid , j , τ dense , j ) \hat{x}_{0,\text{mid},j} = p_\theta\left(x_{\tau,\text{mid},j}, \tau_{\text{dense},j}\right) x^0,mid,j=pθ(xτ,mid,j,τdense,j),其中 p θ p_θ pθ 表示将含噪潜量映射为预测潜向量的标准推理去噪过程。因此,最终的稠密潜预测序列构造为:
X ^ dense [ j ] = { x ^ 0 , acq , i , t dense , j = t acq , i , x ^ 0 , mid , j , t dense , j is intermediate. \hat{X}_{\text{dense}}[j] = \begin{cases} \hat{x}_{0,\text{acq},i}, & t_{\text{dense},j} = t_{\text{acq},i}, \\ \hat{x}_{0,\text{mid},j}, & t_{\text{dense},j} \text{ is intermediate.} \end{cases} X^dense[j]={x^0,acq,i,x^0,mid,j,tdense,j=tacq,i,tdense,j is intermediate.
稠密平滑约束通过二阶中心差分法,将时间维度上的突变方差限制为零,以实现时间平滑性。对 T dense T_{\text{dense}} Tdense 去重以消除可能的重复时间点后,得到有序时间序列 T sort = { t 0 , t 1 , … , t T − 1 } T_{\text{sort}} = \{t_0, t_1, \dots, t_{T-1}\} Tsort={t0,t1,…,tT−1}( T ≤ M T≤M T≤M,其中 t k t_k tk 为以秒为单位的时间值),以及对应的模型输出 y sort = { y sort 0 , y sort 1 , … , y sort T − 1 } y_{\text{sort}} = \{y^0_{\text{sort}}, y^1_{\text{sort}}, \dots, y^{T-1}_{\text{sort}}\} ysort={ysort0,ysort1,…,ysortT−1}(其中 y sort k ∈ R 1 × c × h × w y^k_{\text{sort}} \in \mathbb{R}^{1 \times c \times h \times w} ysortk∈R1×c×h×w 为 t k t_k tk 时刻的模型输出)。对于每个点 k ∈ [ 1 , T − 2 ] k∈[1,T−2] k∈[1,T−2],离散时间点间的稠密平滑约束通过中心差分方程推导(详见补充材料),其定义为:
D 2 k = 2 ⋅ ( y sort k − 1 h 0 k ⋅ ( h 0 k + h 1 k ) − y sort k h 0 k ⋅ h 1 k + y sort k + 1 h 1 k ⋅ ( h 0 k + h 1 k ) ) ⋅ w k , (3) \mathbf{D}_2^k = 2 \cdot \left( \frac{y_{\text{sort}}^{k-1}}{h_0^k \cdot (h_0^k + h_1^k)} - \frac{y_{\text{sort}}^k}{h_0^k \cdot h_1^k} + \frac{y_{\text{sort}}^{k+1}}{h_1^k \cdot (h_0^k + h_1^k)} \right) \cdot w^k, \tag{3} D2k=2⋅(h0k⋅(h0k+h1k)ysortk−1−h0k⋅h1kysortk+h1k⋅(h0k+h1k)ysortk+1)⋅wk,(3)其中 h 0 k = t k − t k − 1 + δ h^k_0 = t_k - t_{k-1} + \delta h0k=tk−tk−1+δ, h 1 k = t k + 1 − t k + δ h^k_1 = t_{k+1} - t_k + \delta h1k=tk+1−tk+δ( δ = 10 − 6 \delta = 10^{-6} δ=10−6 用于避免除零)为相邻时间间隔; w k = 1 1 + h 0 k + h 1 k w^k = \frac{1}{1+h^k_0+h^k_1} wk=1+h0k+h1k1 为间隔权重,用于对较大间隔施加较弱惩罚,以适应不同的时间密度。最终损失为这些差分的平均值,采用 L1 范数以增强对异常值的鲁棒性,表达式为:
L Temporal = 1 T − 2 ∑ k = 1 T − 2 ∥ D 2 ( k ) ∥ 1 . (4) \mathcal{L}_{\text{Temporal}} = \frac{1}{T-2} \sum_{k=1}^{T-2} \|\mathbf{D}_2^{(k)}\|_1. \tag{4} LTemporal=T−21k=1∑T−2∥D2(k)∥1.(4)
3、实验与结果
3.1、实验方案
3.1.1、数据集
(1)私有腹部 DCE-MRI 数据集(Abdominal DCE-MRI): 该腹部数据集包含 91 例患者。每例包含 1 幅非对比图像,以及在注射对比剂后 300 秒内采集的 15 幅对比增强图像。在这些对比增强图像中,6 幅为动脉期,6 幅为静脉期,3 幅为延迟期。
(2)公开 Duke 乳腺 DCE-MRI 数据集(Breast DCE-MRI): 该数据集包含 922 次乳腺 DCE-MRI 检查记录。注射对比剂后,采集 3 或 4 个时间点的对比增强数据。遵循文献[57]的做法,裁剪出包含病灶区域的切片,并将肿瘤边界框的宽度和高度扩展至全图宽度和高度的一半。
两个数据集均被缩放到 256 × 256 256×256 256×256,归一化到 [ − 1 , 1 ] [−1,1] [−1,1] ,然后堆叠为 3 个通道作为图像输入。
3.1.2、评价指标
(1)空间维度:PSNR、SSIM、LPIPS、rMSE;
(2)时间维度:连续 SSIM(cSSIM)
cSSIM = 1 N − 1 ∑ t = 1 N − 1 SSIM ( I t , I t + 1 ) \text{cSSIM} = \frac{1}{N-1} \sum_{t=1}^{N-1} \text{SSIM}(I_t, I_{t+1}) cSSIM=N−11t=1∑N−1SSIM(It,It+1)
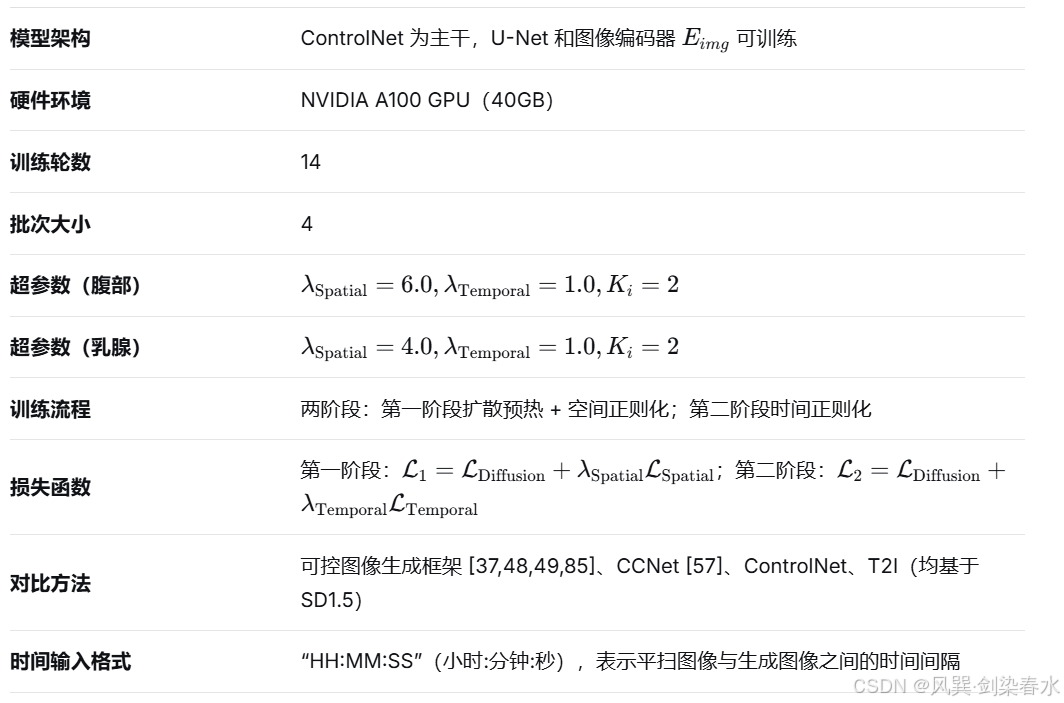
3.1.3、实验设置
3.2、对比分析
3.2.1、 定量结果分析
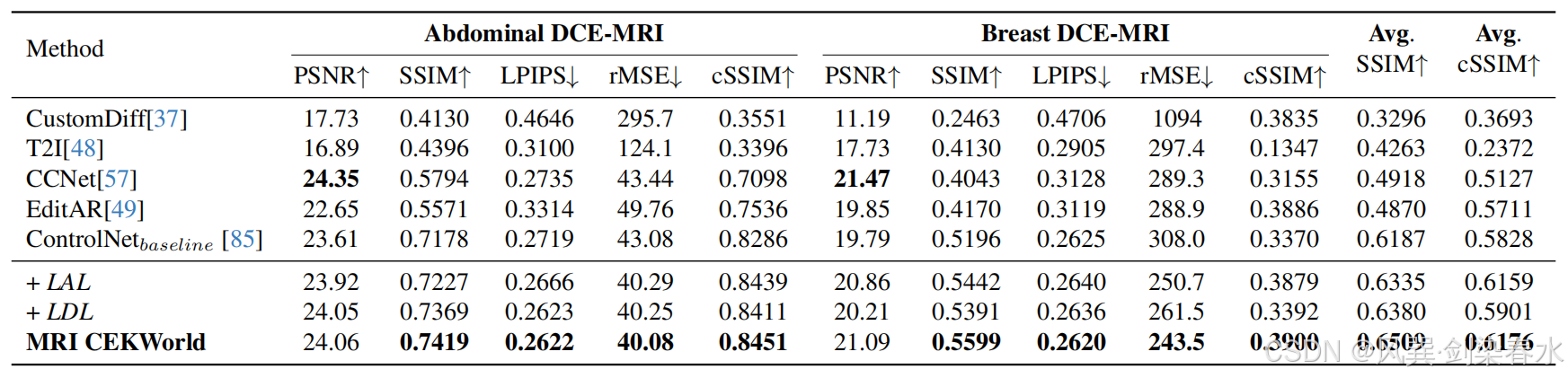
Table 1 | 定量结果:腹部与乳腺动态增强磁共振(DCE-MRI)数据集上不同方法的定量对比展示了本文的方法取得了最优性能;定量消融实验验证了提出的潜空间对齐学习(LAL)与潜空间差异学习(LDL)的有效性。“Avg.SSIM” 与 “Avg.cSSIM” 分别表示两个数据集在空间结构相似性(SSIM)与时间连续结构相似性(cSSIM)指标上的平均得分;
3.2.2、 可视化结果
Figure 4 | 腹部 DCE-MRI 可视化结果:本文的方法在不同时间点的可视化结果相比对比方法(绿色框连接区域)展现出更优的空间真实性(蓝色框放大区域)与时间连续性,而其他方法均出现了偏离真实动力学的情况,或缺乏动态一致性;
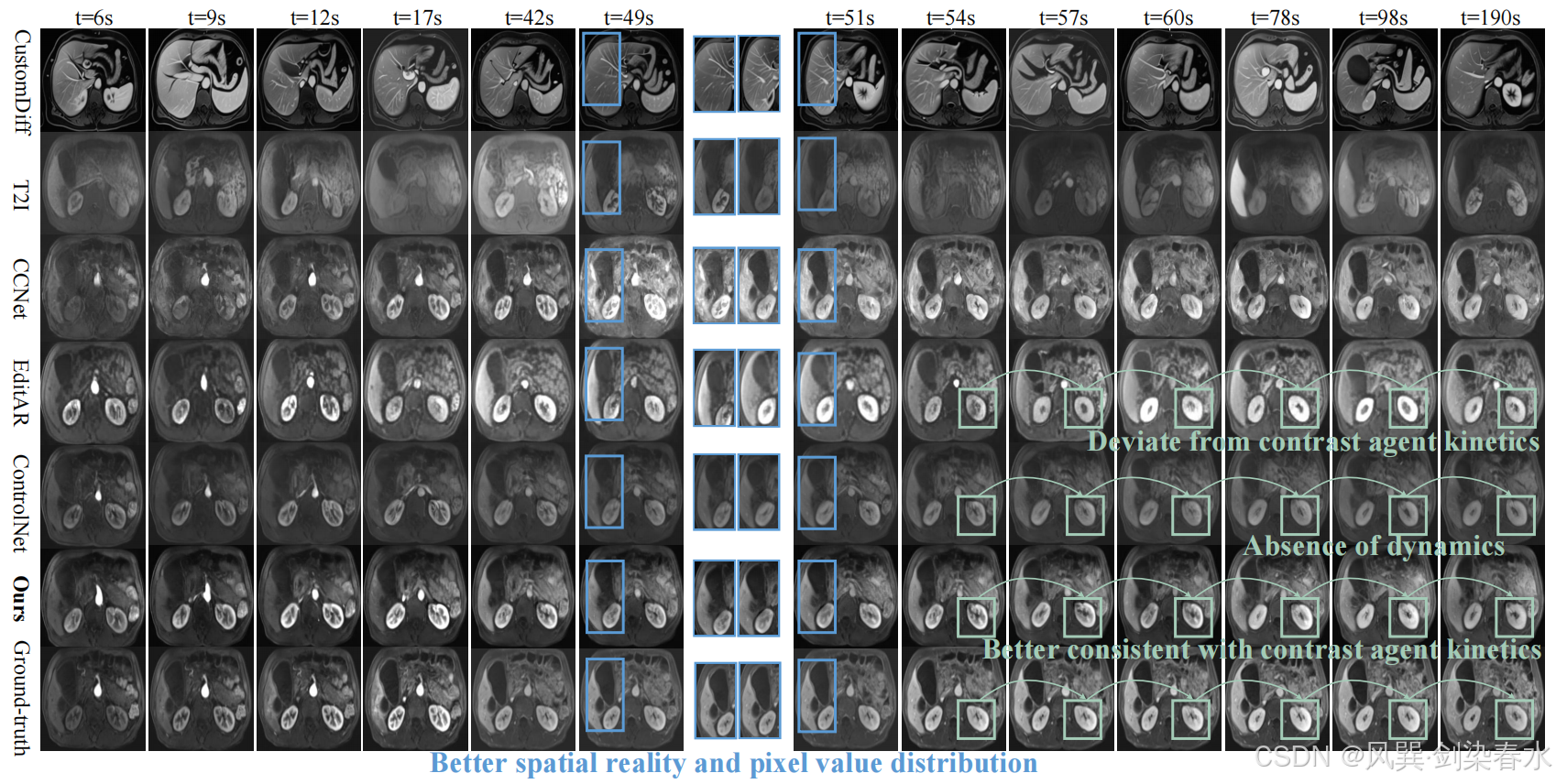
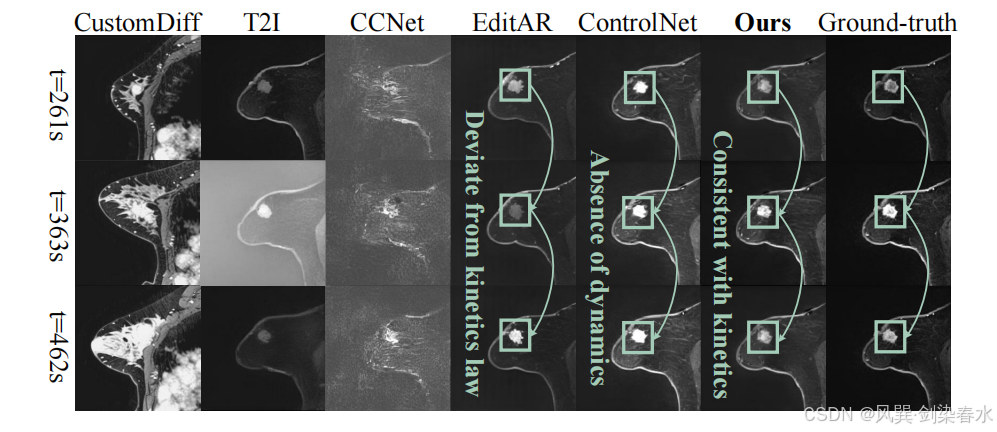
Figure 5 | 乳腺 DCE-MRI 可视化结果:可视化结果实现了与造影剂动力学一致的时间连续性(绿色框连接区域),在乳腺 DCE-MRI 序列生成中展现出优异的保真度;
3.3、消融实验与超参数分析
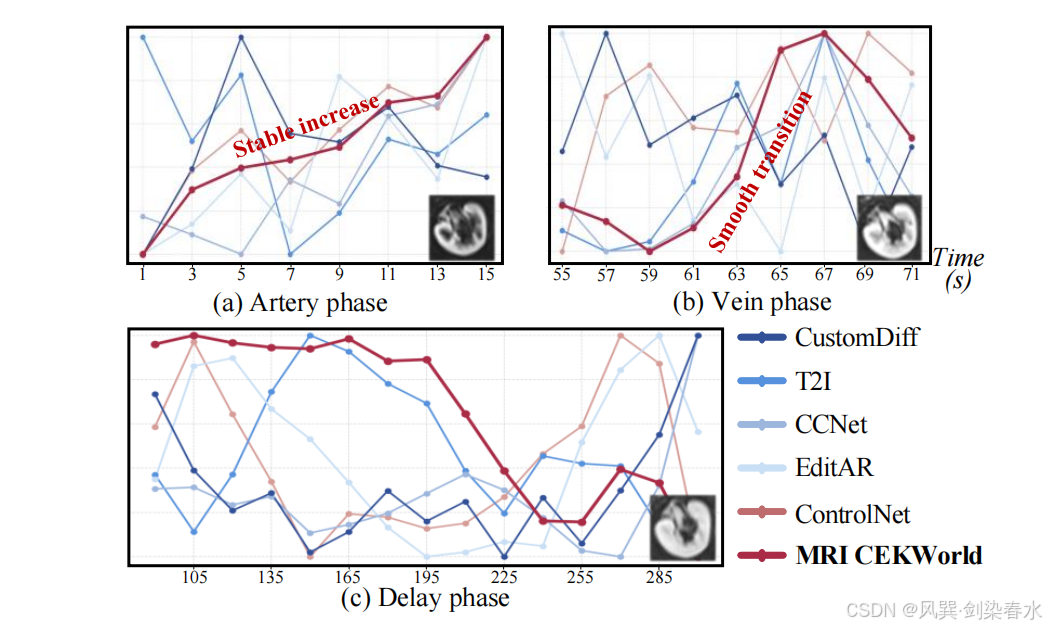
在动脉期(1-15秒)、静脉期(55-72秒)和延迟期(90-300秒)三个临床关键时相上,本文提出的 MRI CEKWorld 方法生成的灰度值曲线最符合生理规律:动脉期稳定上升(反映对比剂快速填充),静脉期平滑过渡(先升后降,反映间质积累与廓清),延迟期先平稳后缓慢衰减(反映对比剂逐渐清除)。而 CCNet、EditAR 等对比方法在各时相均出现明显的突变波动,表明本文方法在建模对比剂动力学方面具有显著优势。
Figure 6 | 造影剂动力学时间曲线:(a) 动脉期、(b) 静脉期及 (c ) 延迟期的曲线较对比方法呈现更稳定的平滑特征;
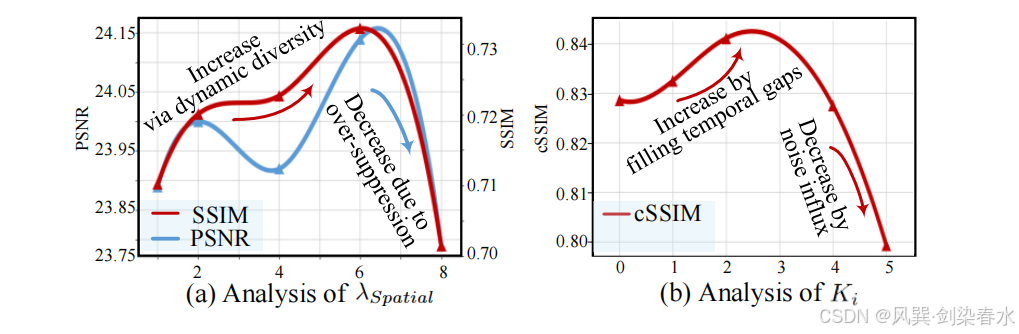
如 图 7 (a) 所示, λ Spatial λ_\text{Spatial} λSpatial 的变化在 SSIM 与 PSNR 指标上呈现先升后降的趋势。 λ Spatial λ_\text{Spatial} λSpatial 决定了潜空间对齐学习(LAL)的空间正则化强度:
(1)当 λ Spatial λ_\text{Spatial} λSpatial 过小时,距离一致性的约束较弱,生成结果会偏离统计模板,空间结构一致性不足;
(2)当 λ Spatial λ_\text{Spatial} λSpatial 取值适中(取 6)时,约束强度在 “贴合模板” 与 “保留特征多样性” 之间达到平衡,生成结果兼具结构一致性与动态合理性;
(3)当 λ Spatial λ_\text{Spatial} λSpatial 过大时,约束会强制特征完全贴合模板,刚性压制了时间点间本应存在的合理特征差异,导致生成序列的动态多样性丧失,指标随之下降;
如 图 7 (b) 所示,衡量时间连续性的 cSSIM 指标随 K i K_i Ki 的变化同样呈现先升后降的趋势:
(1)随着 K i K_i Ki 增大,新增的中间采样点恰好填补了稀疏时间序列的间隙,为模型提供了更精细的时间演化中间状态,使其能更准确地学习造影剂动力学的连续变化规律,时间连续性显著提升;
(2)但当 K i K_i Ki 超过 2 后,过多的中间采样点并非来源于真实数据分布,而是引入了偏离真实模式的噪声,这会干扰模型对真实时间特征的学习,导致 cSSIM 等时间连续性指标下降;
Figure 7 | 超参数分析:对 λ Spatial λ_\text{Spatial} λSpatial 与 K i K_i Ki 的分析呈现出先上升后下降的趋势:(a) PSNR 与 SSIM 指标:在允许更多动态多样性时指标提升,而对动态过度抑制时指标下降;(b) cSSIM 指标:在填补时间间隙时指标提升,而因噪声涌入时指标下降;
通过主成分分析将 ControlNet 在反向过程中从潜在空间获得的潜在空间向量压缩到低维空间,并根据对应时间进行着色(颜色越浅、越偏黄,表示时间值越大),如 图 8 所示,通过潜在空间特征分布的可视化分析,本文提出的 MRI CEK-World 模型相比基线方法具有以下优势:
(1)连续性与一致性: 生成序列的潜在特征在低维空间中呈现连续且一致的分布,不同时间点特征聚类明显,表明空间一致性与时间连续性得到有效保持;
(2)平滑时间演化: 随时间从浅到深的颜色渐变反映了特征在时间维度上的平滑过渡,符合对比剂动力学的连续变化规律;
(3)边界点限制: t = 0 t=0 t=0 和 t = 1 t=1 t=1 时刻的特征点因中心差分公式的边界效应而未受约束,在图中表现为离群点,这属于方法本身的合理局限;
Figure 8 | 潜在空间中的分布:潜在空间中特征点的分布表明,连续时间点的生成结果遵循时间连续性与空间一致性;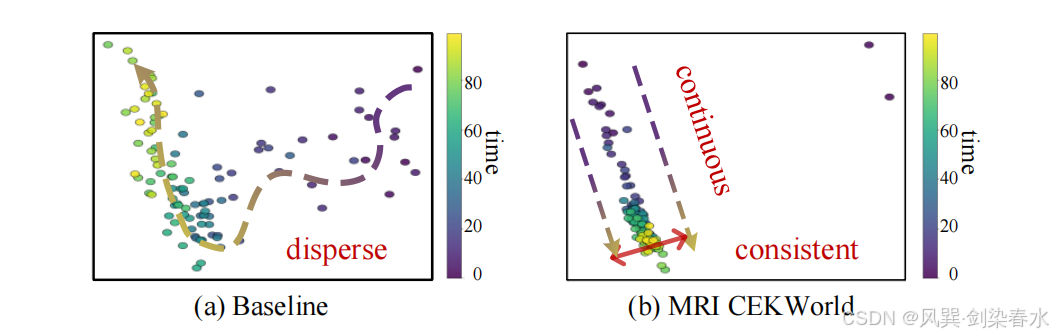
无造影剂已经干到动态变化了(●’◡’●)

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 13
13 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)