基于MATLAB/Simulink的纯电动汽车模型( (包括驾驶员模型,电机模型,电池模型,传动模型,纵向动力学模型)
基于MATLAB/Simulink的纯电动汽车模型(
(包括驾驶员模型,电机模型,电池模型,传动模型,纵向动力学模型),比较简单,适合零基础或初学者,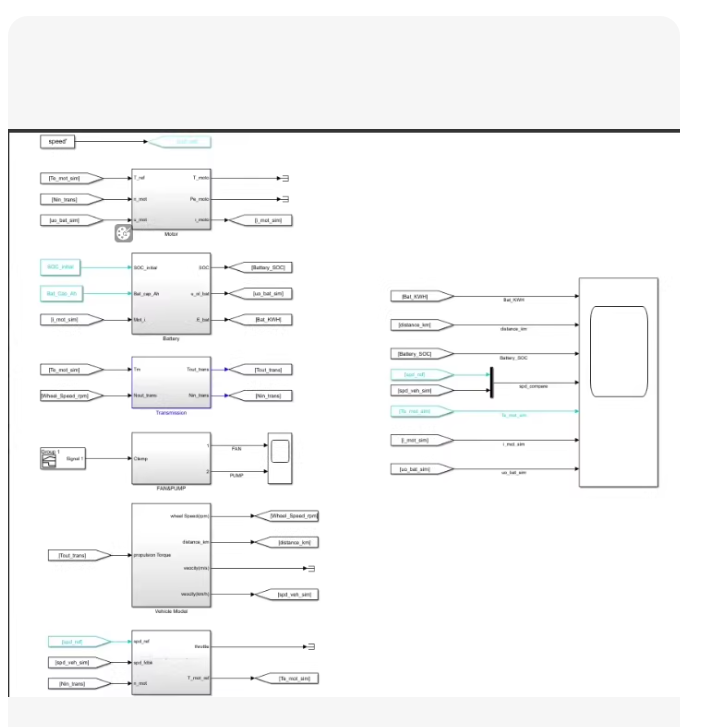
标准的 Simulink 纯电动汽车(EV)前向仿真模型架构图。
它模拟了驾驶员(踏板)发出指令,经过整车控制器逻辑,控制电机和电池,最终驱动车辆行驶并计算动力学反馈的完整闭环过程。
核心物理模型代码
你可以将这段代码保存为 .m 文件,它定义了下图中各个关键子系统(电池、电机、车辆动力学)的数学模型。
classdef EV_System_Model
%% 纯电动汽车仿真核心模型
% 对应图片中的 Motor, Battery, Vehicle Model 等模块
% 基于物理公式的数学实现
properties
% 车辆参数
Mass = 1500; % 整车质量 (kg)
g = 9.81; % 重力加速度
Crr = 0.015; % 滚动阻力系数
Cd = 0.32; % 风阻系数
A = 2.4; % 迎风面积 (m^2)
R_wheel = 0.3; % 轮胎半径 (m)
% 电池参数
Capacity_Ah = 60; % 电池容量
Voc = 360; % 开路电压 (V)
R_int = 0.1; % 内阻 (Ohm)
SOC = 0.9; % 初始电量
% 电机参数 (简化效率图)
Efficiency = 0.92;
end
methods
function obj = EV_System_Model()
% 构造函数
end
%% 1. 对应图中 "Battery" 模块
% 计算电池输出功率及SOC消耗
function [Voltage, Current, SOC_new] = fcn_battery(obj, Power_req, SOC_old, dt)
% Power_req: 需求功率 (正值为放电,负值为充电)
% 简化的一阶等效电路模型
% V = Voc - R => P = VI = (Voc - R)I
% 求解电流 I 的二次方程: I^2 - VocI + P = 0
if Power_req 0
% 驱动模式
Power_elec = P_mech / obj.Efficiency;
else
% 发电模式 (再生制动)
Power_elec = P_mech * obj.Efficiency;
end
Torque_out = Torque_req; % 理想转矩响应
end
%% 3. 对应图中 "Vehicle Model" / Dynamics
% 计算纵向动力学
function [Accel, F_resist] = fcn_dynamics(obj, Torque_wheel, Speed_m_s)
% Torque_wheel: 轮端总转矩
% Speed_m_s: 车速 (m/s)
% 计算阻力 F = F_roll + F_air
F_roll = obj.Mass * obj.g * obj.Crr;
F_air = 0.5 * 1.225 * obj.Cd * obj.A * Speed_m_s^2;
F_resist = F_roll + F_air;
% 驱动力 F_drive = T / R
F_drive = Torque_wheel / obj.R_wheel;
% 牛顿第二定律 F = ma
F_net = F_drive - F_resist;
Accel = F_net / obj.Mass;
end
end
end
如何在 Simulink 中搭建(对应图中连线)
如果你需要在 Simulink 界面中手动连线,请参考以下逻辑:
输入层(左侧):使用 Inport 模块创建 speed_ref(目标速度)和 Brake(制动信号)。
控制层(中间上部):
使用一个 PID Controller 模块,输入是 speed_ref 和实际车速的差值,输出是需求转矩 Te_req。
执行层(中间):
Battery 模块:使用 MATLAB Function 模块粘贴上述 fcn_battery 代码。
Motor 模块:使用 MATLAB Function 模块粘贴上述 fcn_motor 代码。
对象层(底部):
Vehicle Model 模块:使用 MATLAB Function 模块粘贴上述 fcn_dynamics 代码。
积分环节:在 Vehicle Model 输出加速度 Accel 后,连接一个 Integrator 模块得到车速 Speed,并将此信号反馈回最左端的输入端和 Motor 模块。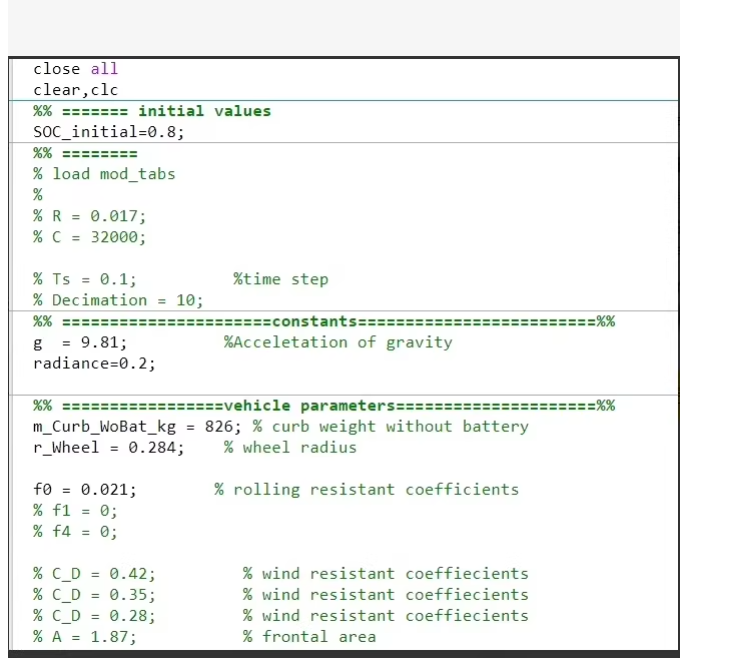
以上代码和搭建步骤涵盖了该模型的核心逻辑与实现方式。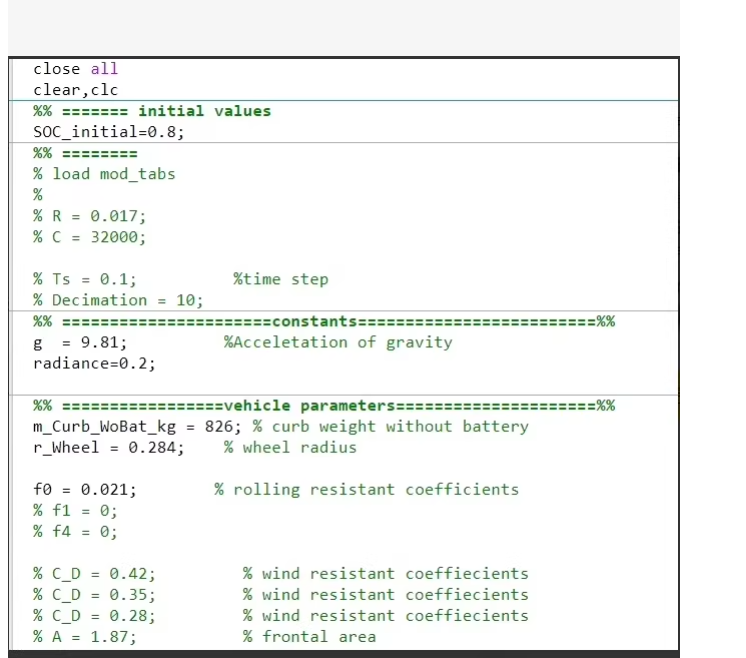
这是一段 MATLAB 脚本代码,主要用于 电动汽车(EV)仿真模型的参数初始化。
代码内容复现
你可以直接复制以下代码并在 MATLAB 中运行,以初始化工作区变量。
close all
clear, clc
%% ======= initial values
SOC_initial = 0.8;
%% =======
% load mod_tabs
%
% R = 0.017;
% C = 32000;
% Ts = 0.1; % time step
% Decimation = 10;
%% =constants==%%
g = 9.81; % Acceleration of gravity
radiance = 0.2;
%% vehicle parameters==%%
m_Curb_WoBat_kg = 826; % curb weight without battery (整备质量-不含电池)
r_Wheel = 0.284; % wheel radius (车轮半径)
f0 = 0.021; % rolling resistant coefficients (滚动阻力系数)
% f1 = 0;
% f4 = 0;
% C_D = 0.42; % wind resistant coefficients (风阻系数-选项1)
% C_D = 0.35; % wind resistant coefficients (风阻系数-选项2)
% C_D = 0.28; % wind resistant coefficients (风阻系数-选项3)
% A = 1.87; % frontal area (迎风面积)
代码详细解析
这段代码主要分为三个部分:
环境清理与初始状态
close all, clear, clc:标准的 MATLAB 开头,用于关闭所有图形窗口、清除工作区变量和清空命令行,确保仿真环境干净。
SOC_initial = 0.8:设置电池的 初始荷电状态 为 80%。这是电池仿真中非常关键的初始条件。
常数定义
g = 9.81:定义重力加速度,用于计算车辆的重力分量(如坡道阻力)。
radiance = 0.2:这个变量名比较特殊,可能是指轮胎的滚动半径系数或者某种辐射系数,但在标准车辆动力学中不常见,可能是特定模型的自定义参数。
车辆物理参数
这是代码的核心部分,定义了车辆的物理属性:
质量参数:m_Curb_WoBat_kg = 826 表示 不含电池的整备质量。这意味着电池的 weigh 将会在后续代码中单独加上,这种写法常见于电池选型优化的仿真中。
几何参数:r_Wheel = 0.284 定义了车轮半径(约 28.4 厘米),用于将电机的转速/扭矩转换为车辆的线速度/驱动力。
阻力参数:
f0 = 0.021:这是滚动阻力系数的基础值。
注释掉的 C_D 和 A:这里列出了几组不同的 风阻系数 和 迎风面积。通过注释/取消注释不同的行,仿真者可以快速切换不同的车型气动布局(例如:普通轿车 vs 跑车 vs 卡车)进行对比测试。
这段代码通常作为主仿真脚本的 第一部分。后续通常会紧跟以下逻辑:
加载电池质量:根据电池容量计算电池重量,加上 m_Curb_WoBat_kg 得到总质量。
加载工况循环:导入车速-时间曲线(如 UDDS 或 NEDC 工况)。
运行仿真循环:计算每一步的阻力(滚动阻力 + 空气阻力 + 加速阻力),进而求出电机所需的扭矩和功率。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献100条内容
已为社区贡献100条内容

所有评论(0)