工业机器人工作站系统建模的应用
一、建模功能的使用
1.使用Robotstudio建模功能进行3D模型的创建。
单击“新建”菜单命令组,选择空工作站,点击“创建”,创建一个新的空工作站。
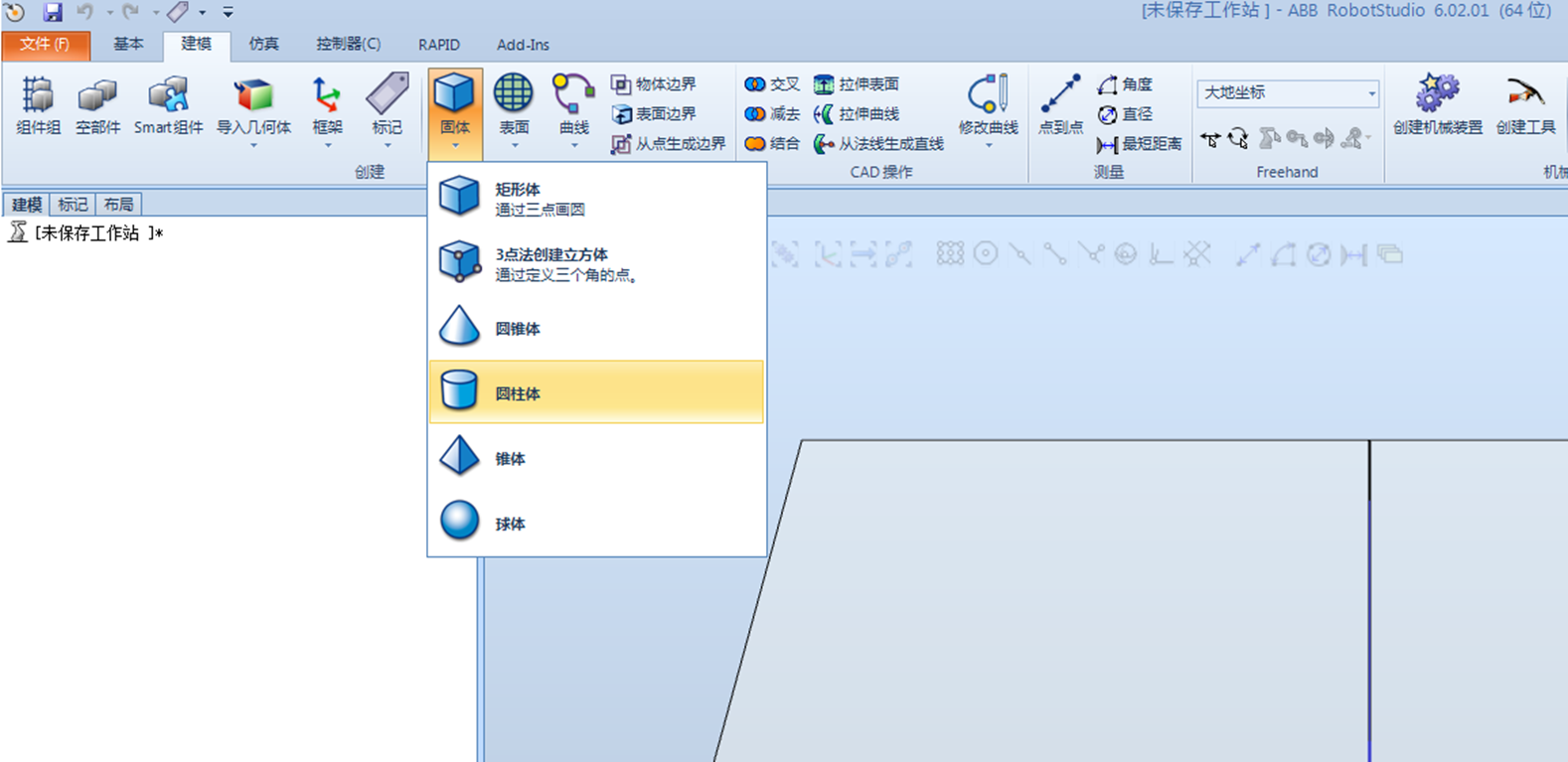
在“建模”功能选项卡中,单击“创建”组中的“固体”菜单,选择“圆柱体”。
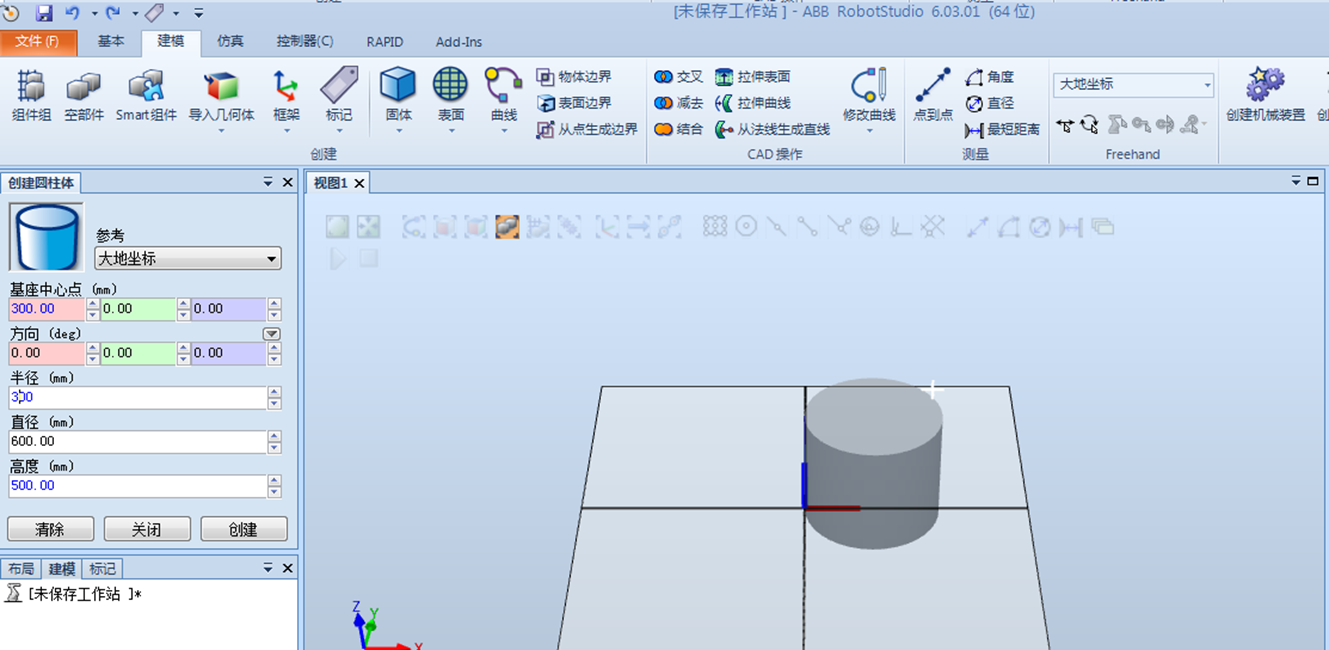
在相应位置进行进行参数输入,半径:300mm,高度500mm。
2.对3D模型进行相关设置。
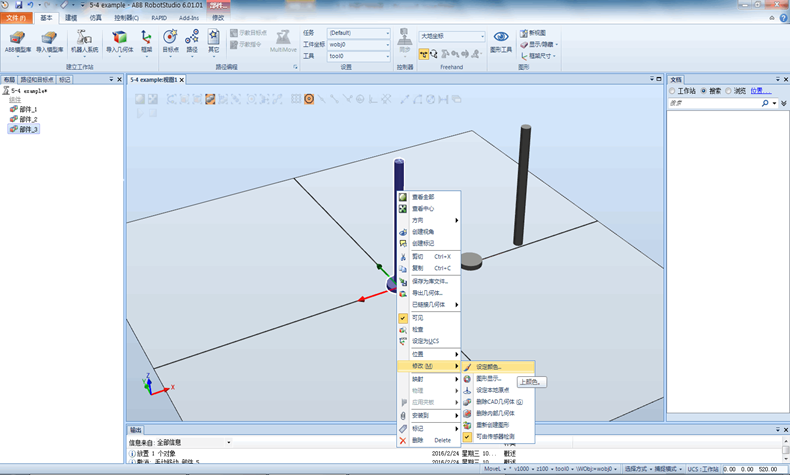
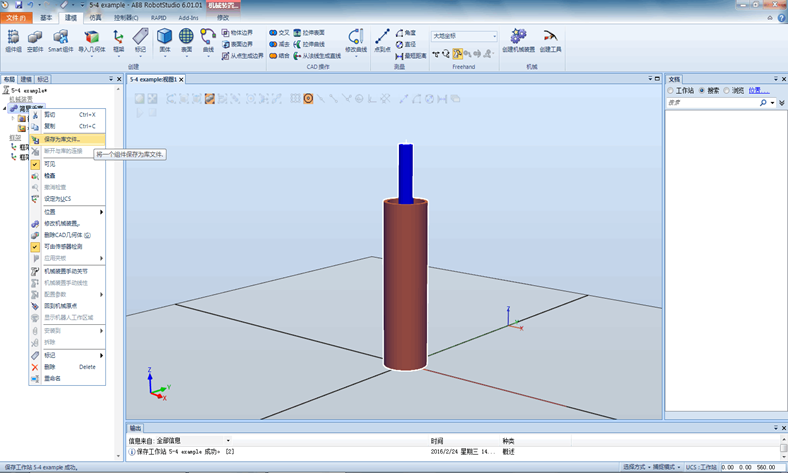
在刚创建的对象上单击右键,在弹出的快捷菜单中可以进行颜色、移动、显示等相关的设定。
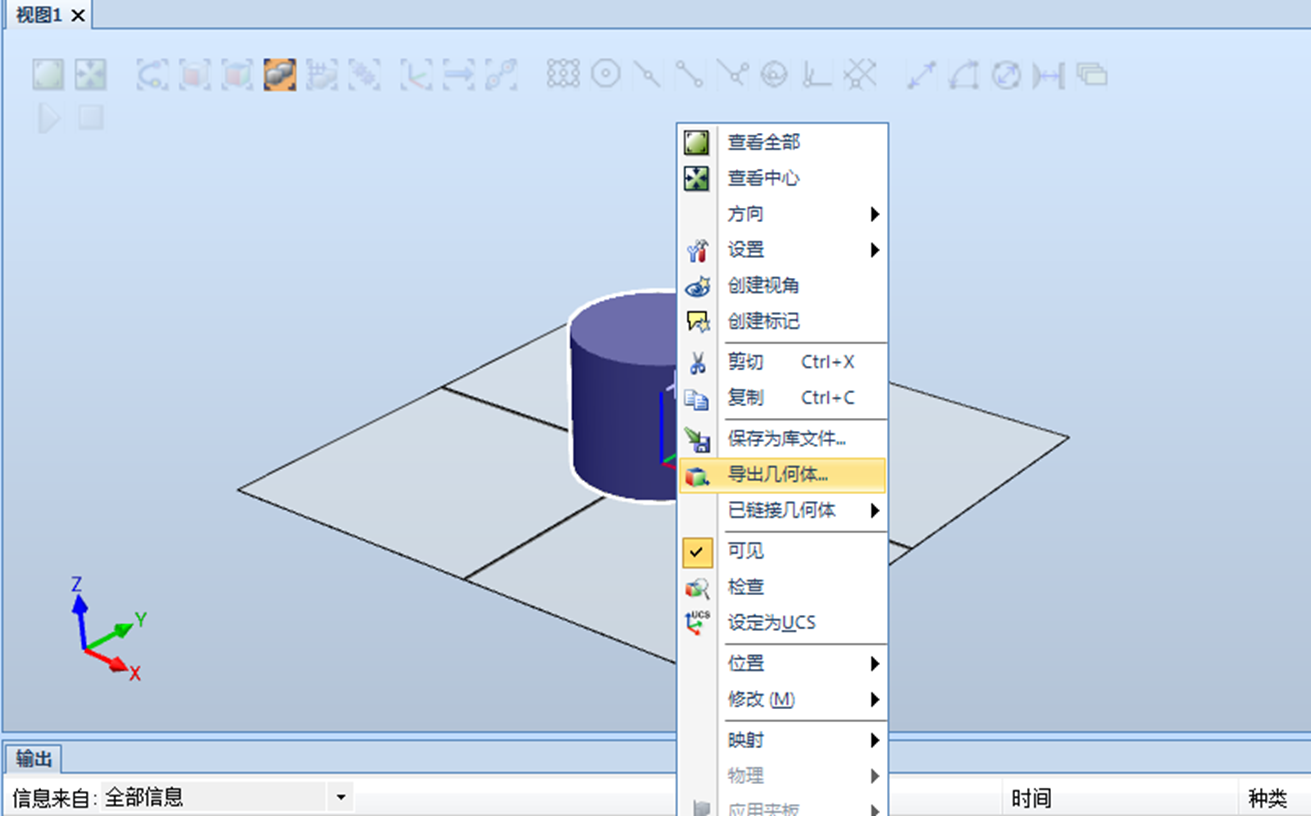
在对象设置完成后,单击“导出几何体”,就可将对象进行保存。
二、测量工具的使用
1.测量长方体的尺寸参数(长、宽、高)
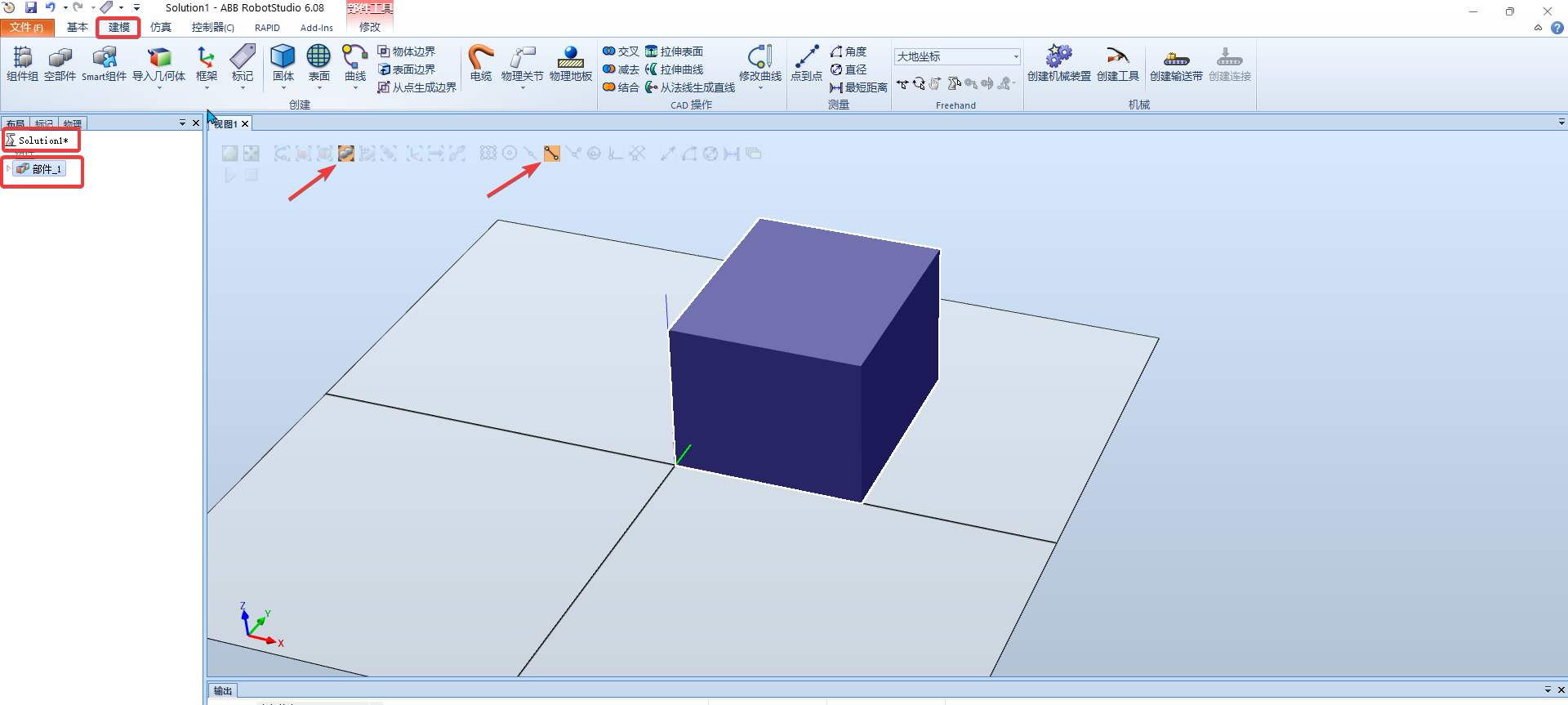
打开工作站Solutionl*,切换到“建模”功能选项卡,单击“选择部件”,选择要进行测量的部件。然后,单击“捕捉末端”快捷图标。
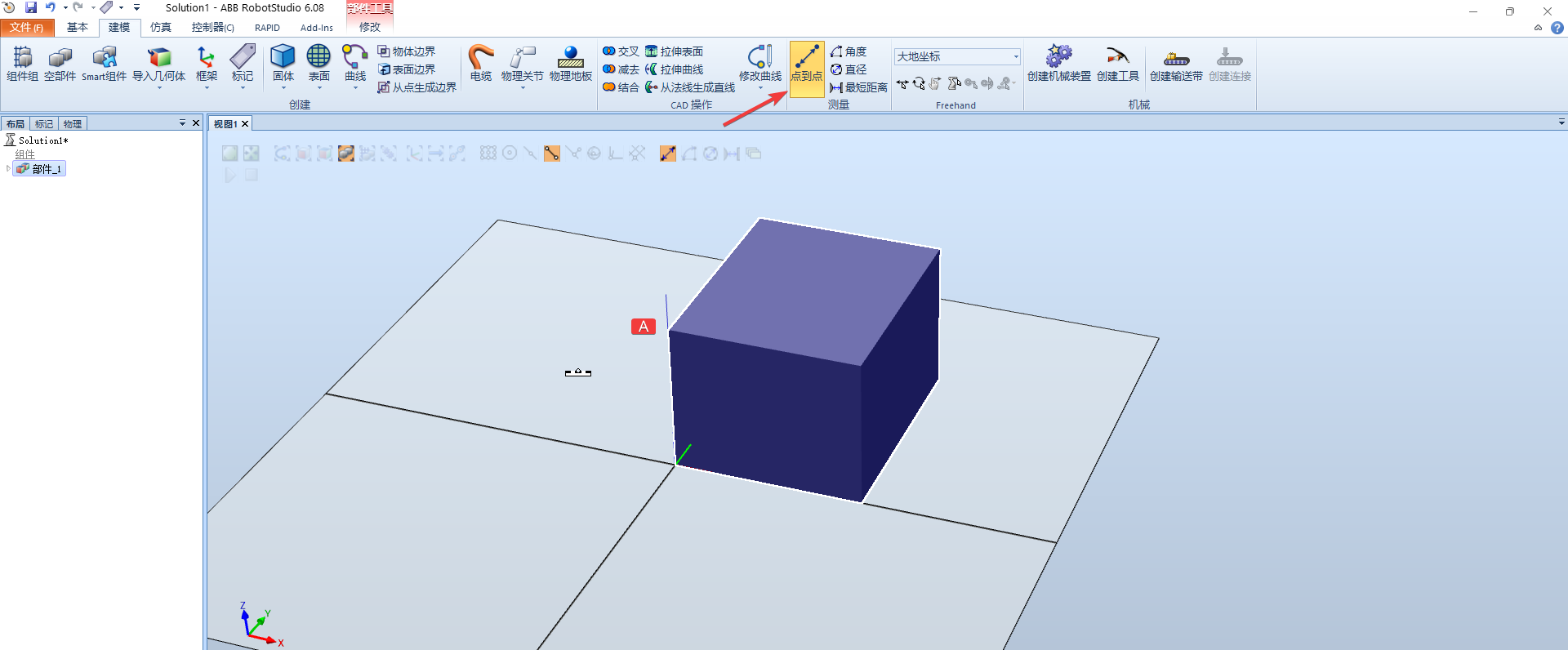
在“建模”功能选项卡,单击“点到点”,选择要测量的A点。
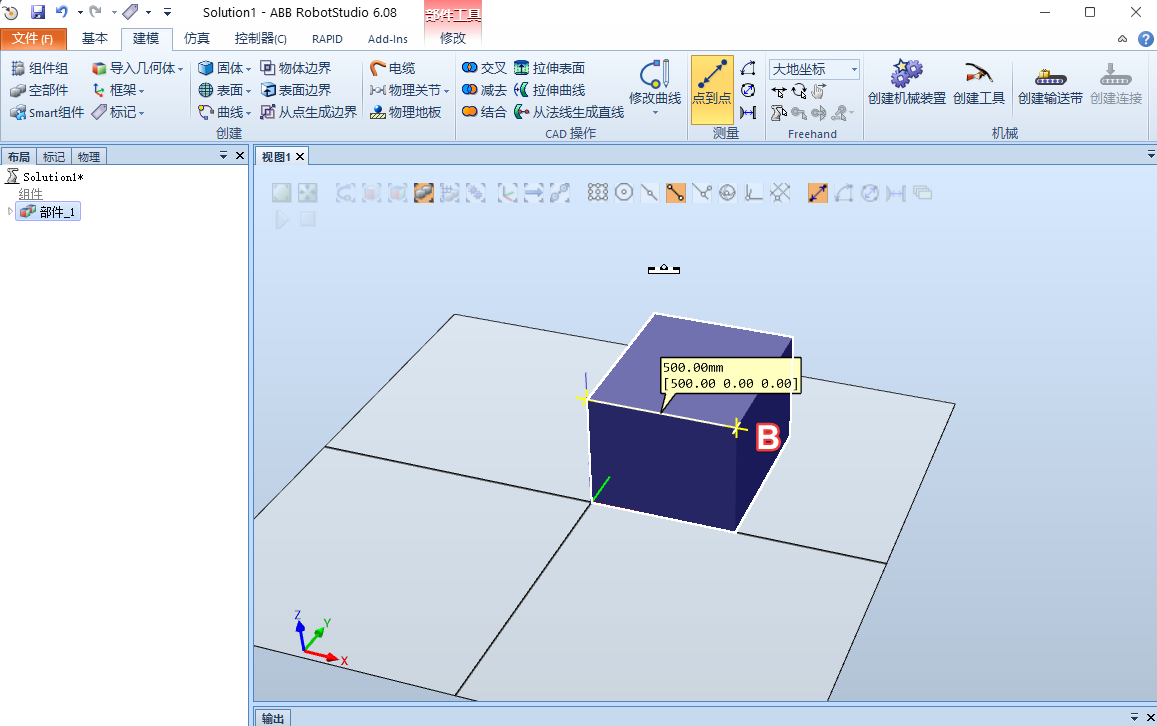
选择要测量的B点,单击鼠标左键,测量结果自动显示出来。
长方体其余尺寸参数的测量方法与此相同,请自行测量。
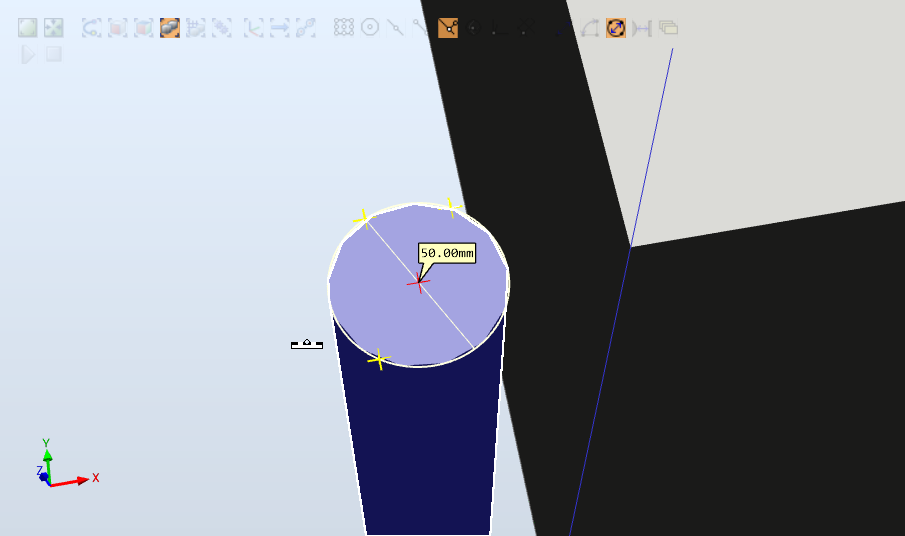
2.测量圆柱体的直径
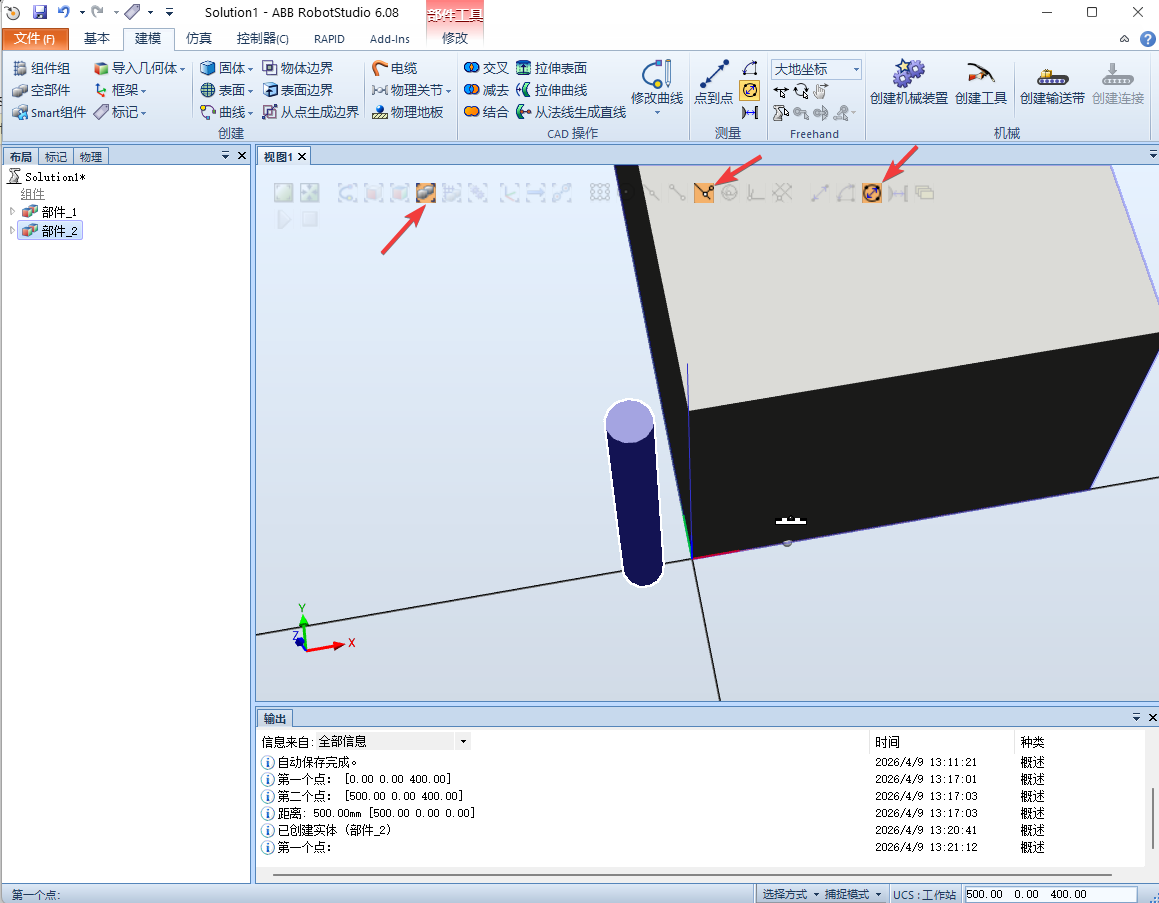
切换到“建模”功能选项卡,单击“选择部件”,选择要进行测量的部件。然后,单击“捕捉边缘”,单击“直径”.
选择要测量的圆周,在其上任意选取A、B、C三点,单击鼠标左键,测量结果自动显示出来.
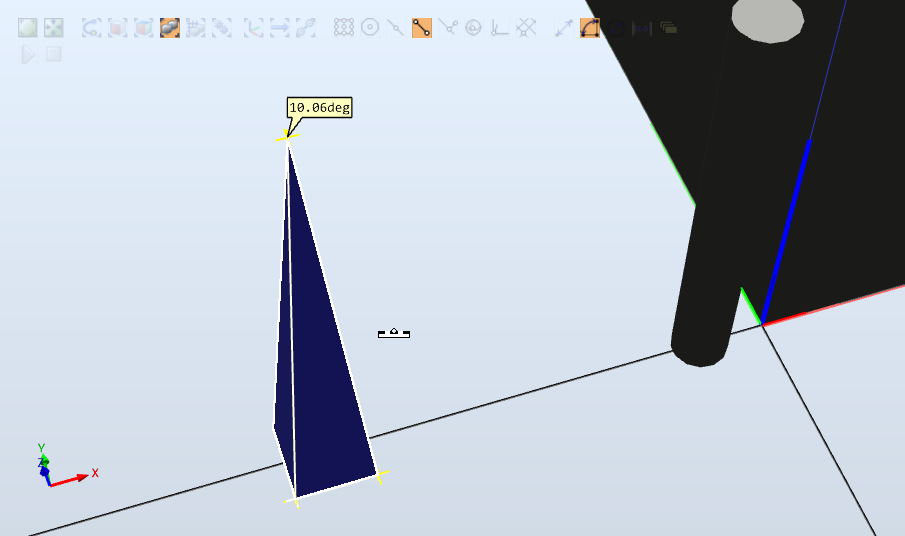
3.测量锥体的角度
切换到“建模”功能选项卡,单击“选择部件”,选择要进行测量的部件。然后,单击“捕捉末端”,单击“角度”.
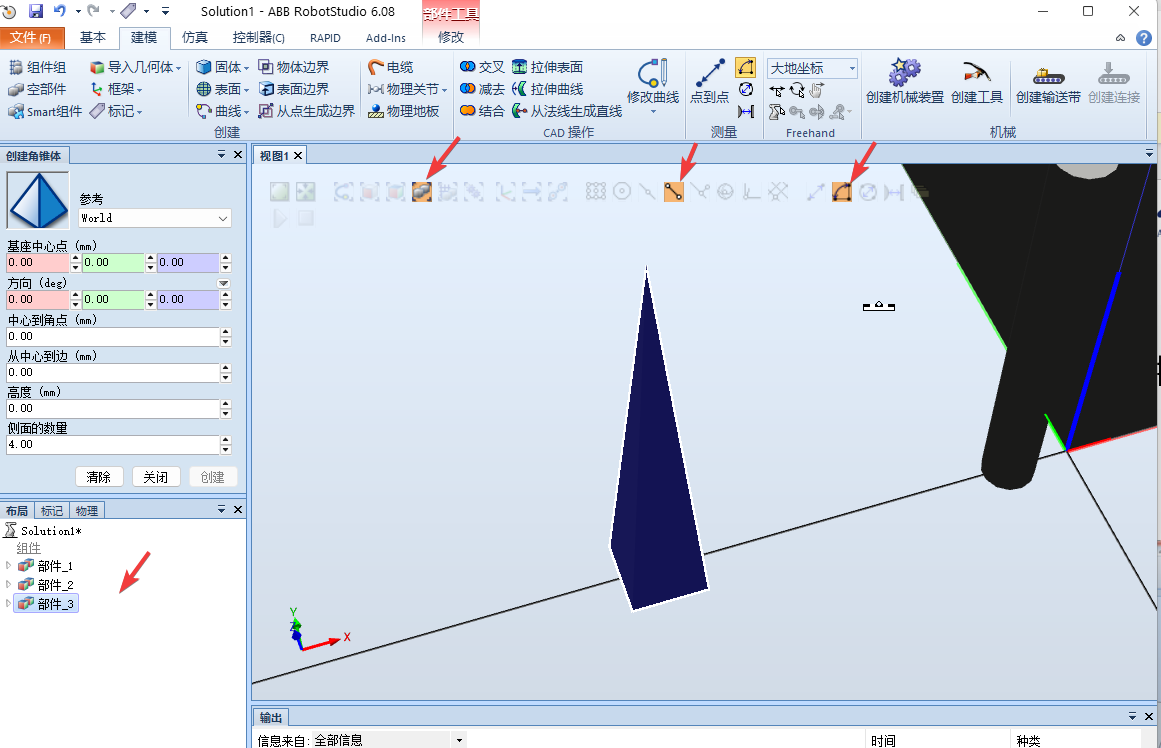
选择要测量的角度,在其边上依次选取A、B、C三点,单击鼠标左键,测量结果自动显示出来.
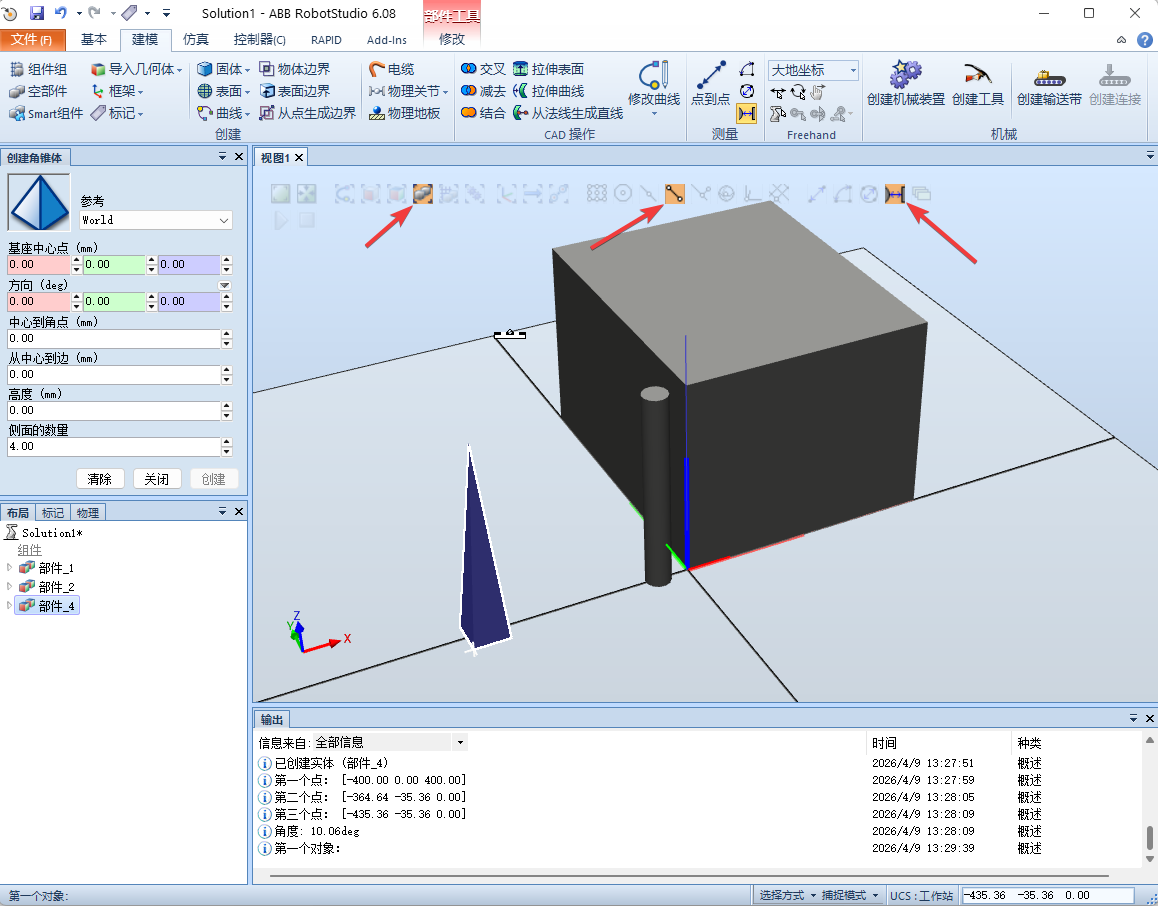
4.测量两个物体间的最短距离
切换到“建模”功能选项卡,单击“选择部件”,单击“捕捉末端”,单击“最短距离”,然后选择要进行测量的两个部件的任意端点.

三、创建机械装置
创建一个简易的活塞模型
建立活塞的机械运动特性
1.创建一个简易的活塞模型
新建空工作站并保存为666.
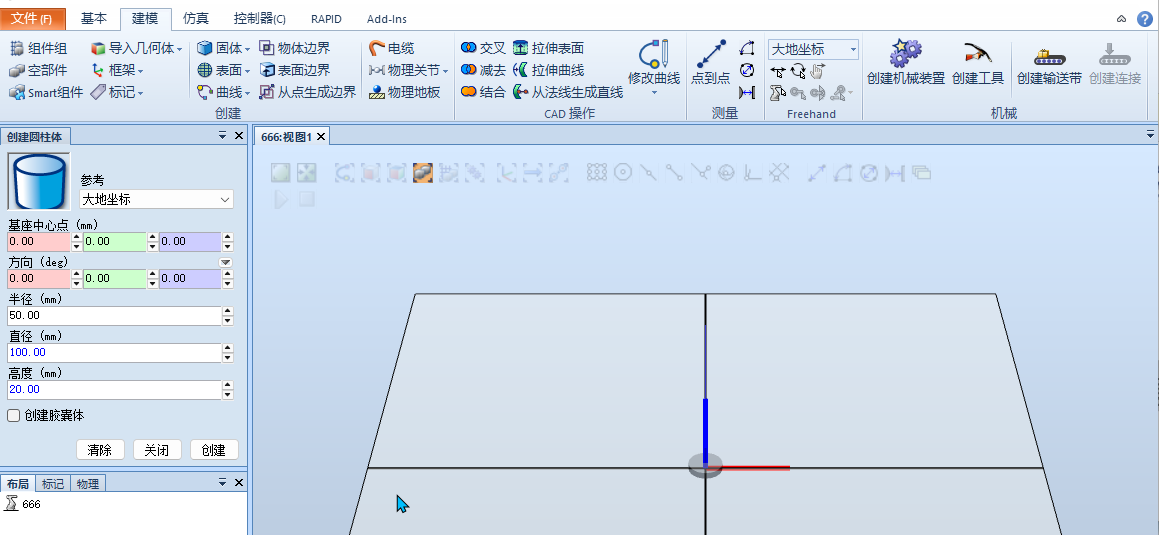
在“建模”功能选项卡中,单击“固体”,选择“圆柱体”,完成活塞的创建(直径100mm、高度20mm)
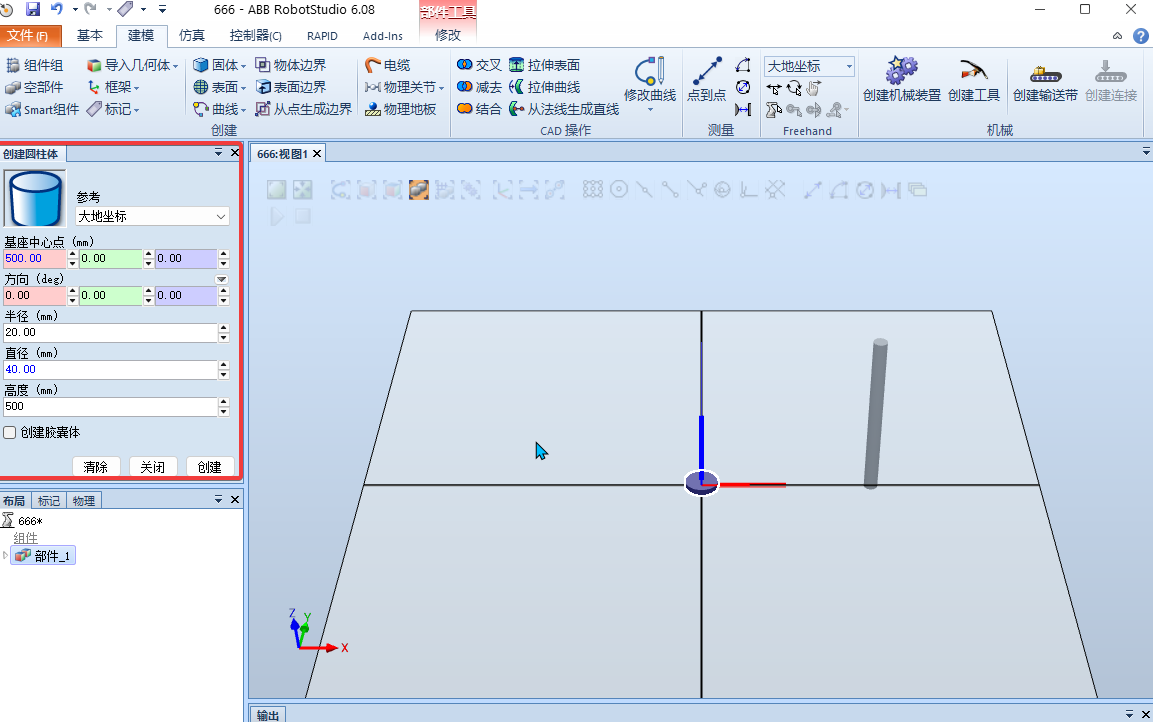
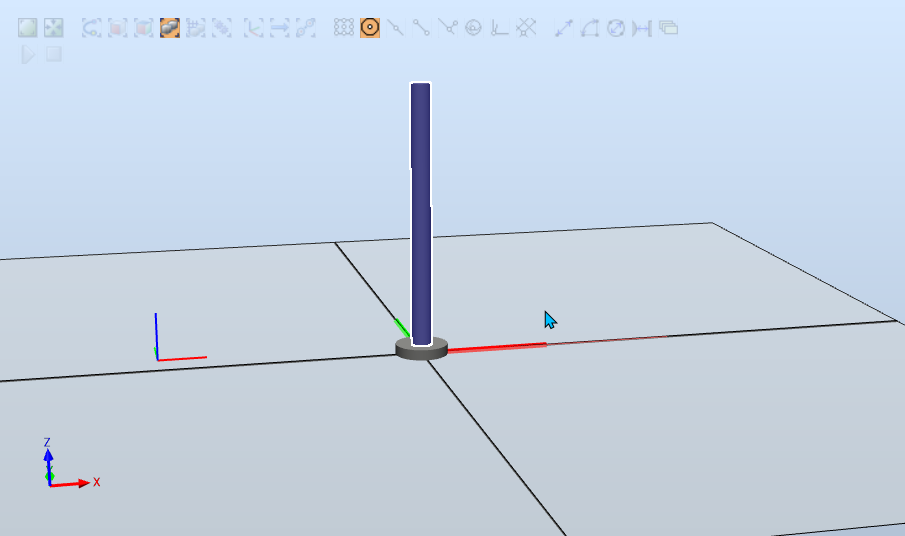
在“建模”功能选项卡中,单击“固体”,选择“圆柱体”,完成活塞杆的创建(直径40mm、高度500mm)
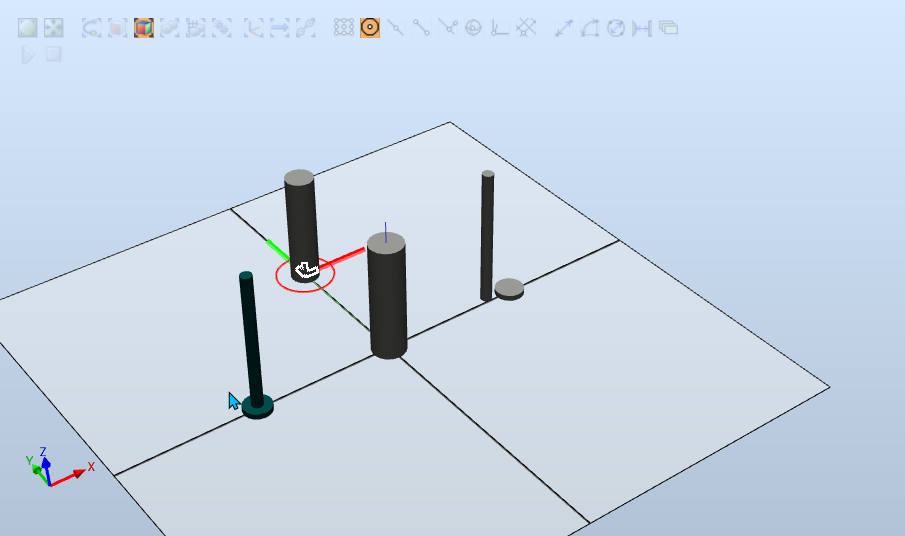
单击“选择部件”,右击活塞杆,设置放置方式“一个点”,然后单击“捕捉中心”。
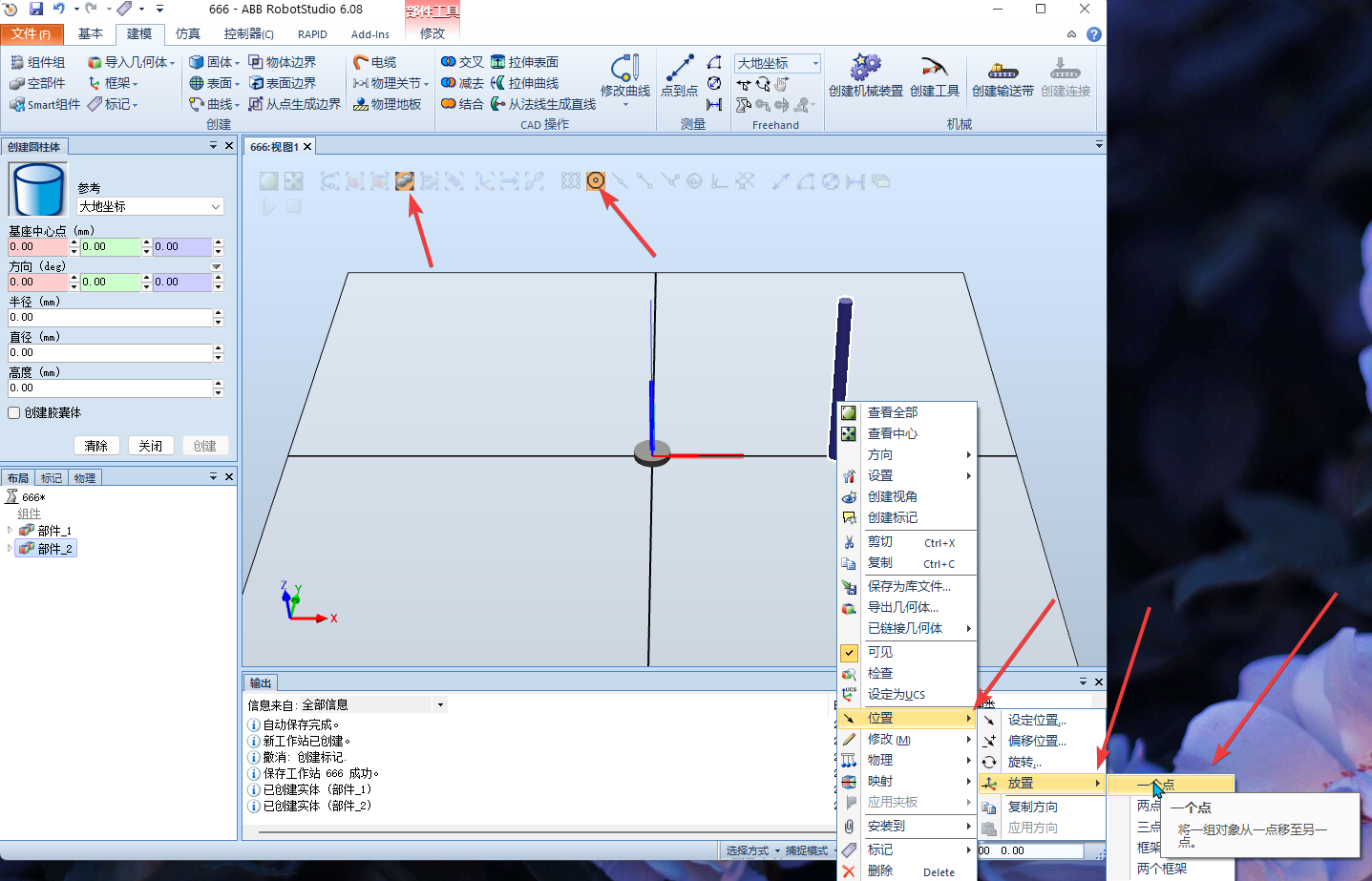
单击左上方“主点-从”坐标,选择活塞杆底面圆的圆心;单击左上方“主点-到”坐标,选择活塞上表面圆心,然后单击确定完成放置。
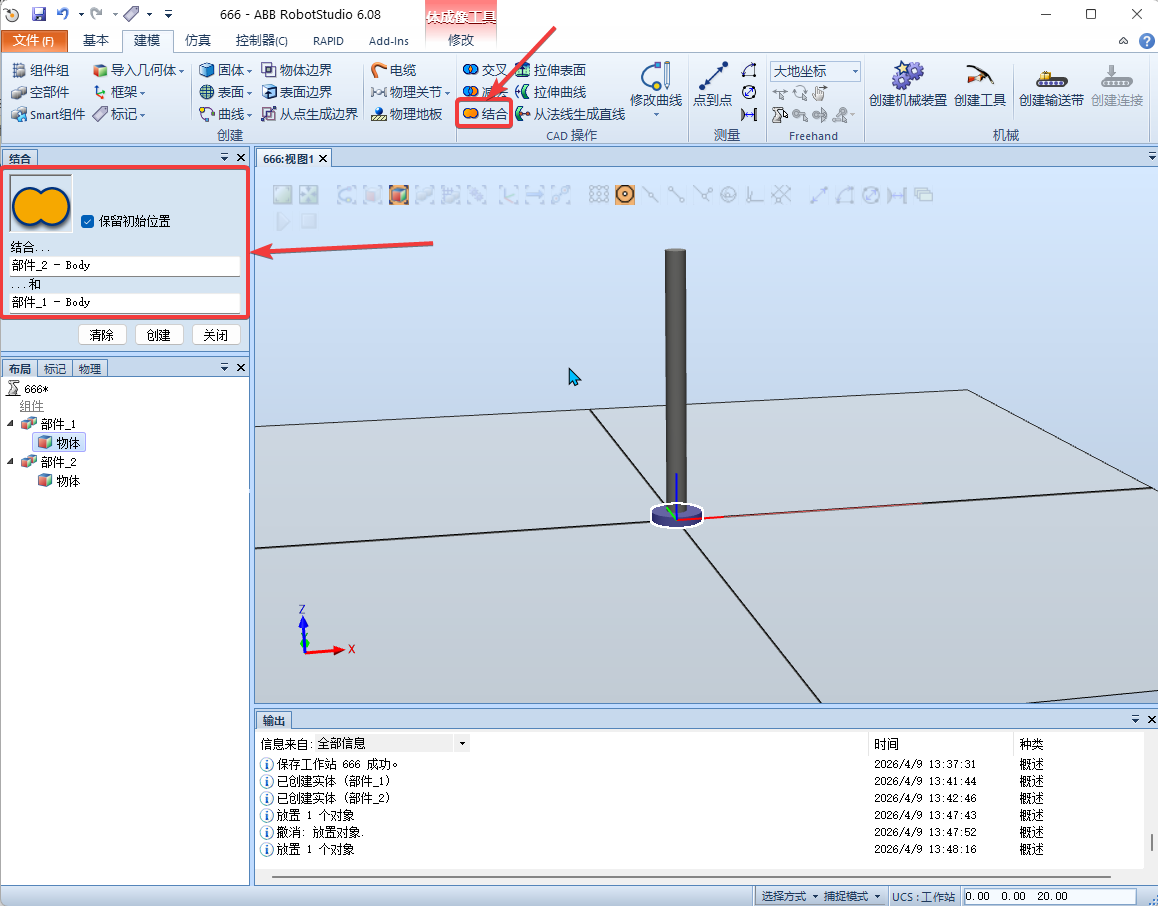
在“建模”功能选项卡中,单击“结合”,分别选择活塞杆和和活塞,然后单击确定完成结合并移走原部件。
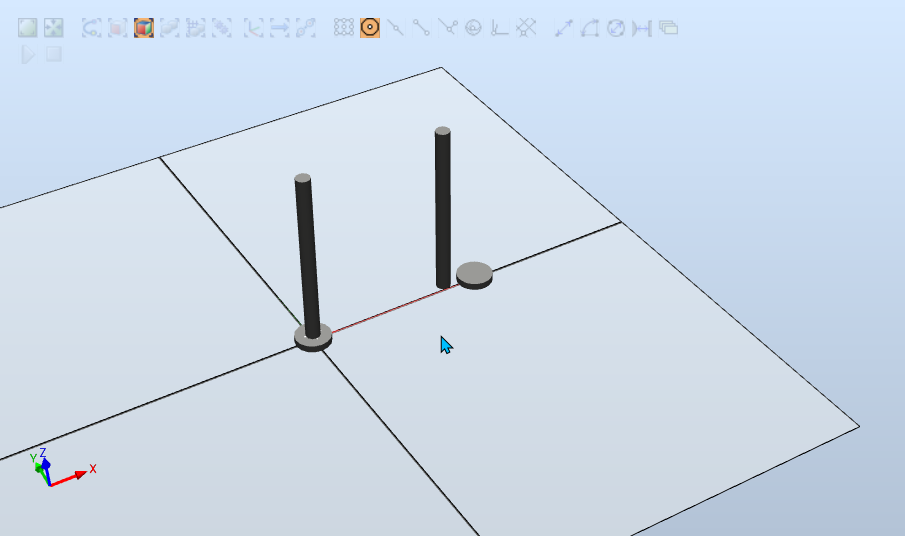
右键单击组合体“部件3”,完成活塞和活塞杆的颜色设置.
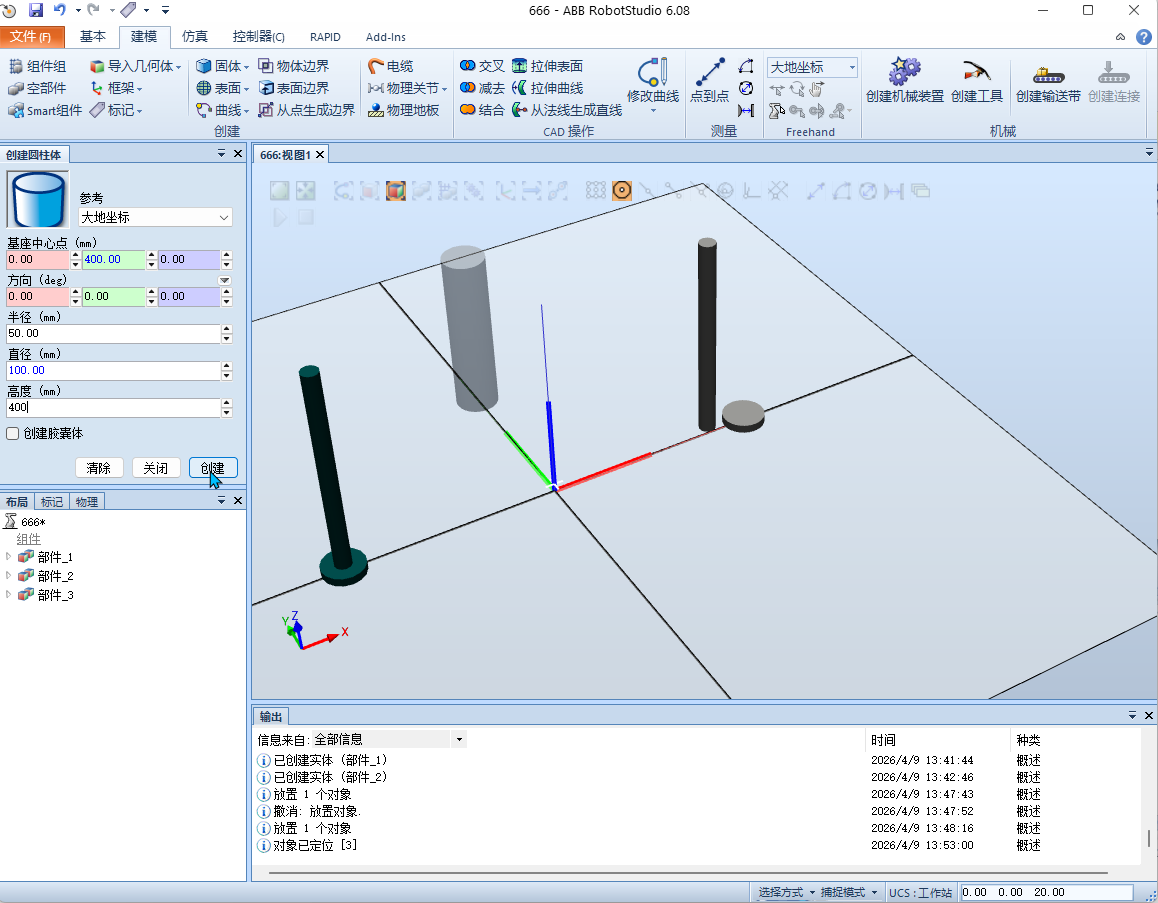
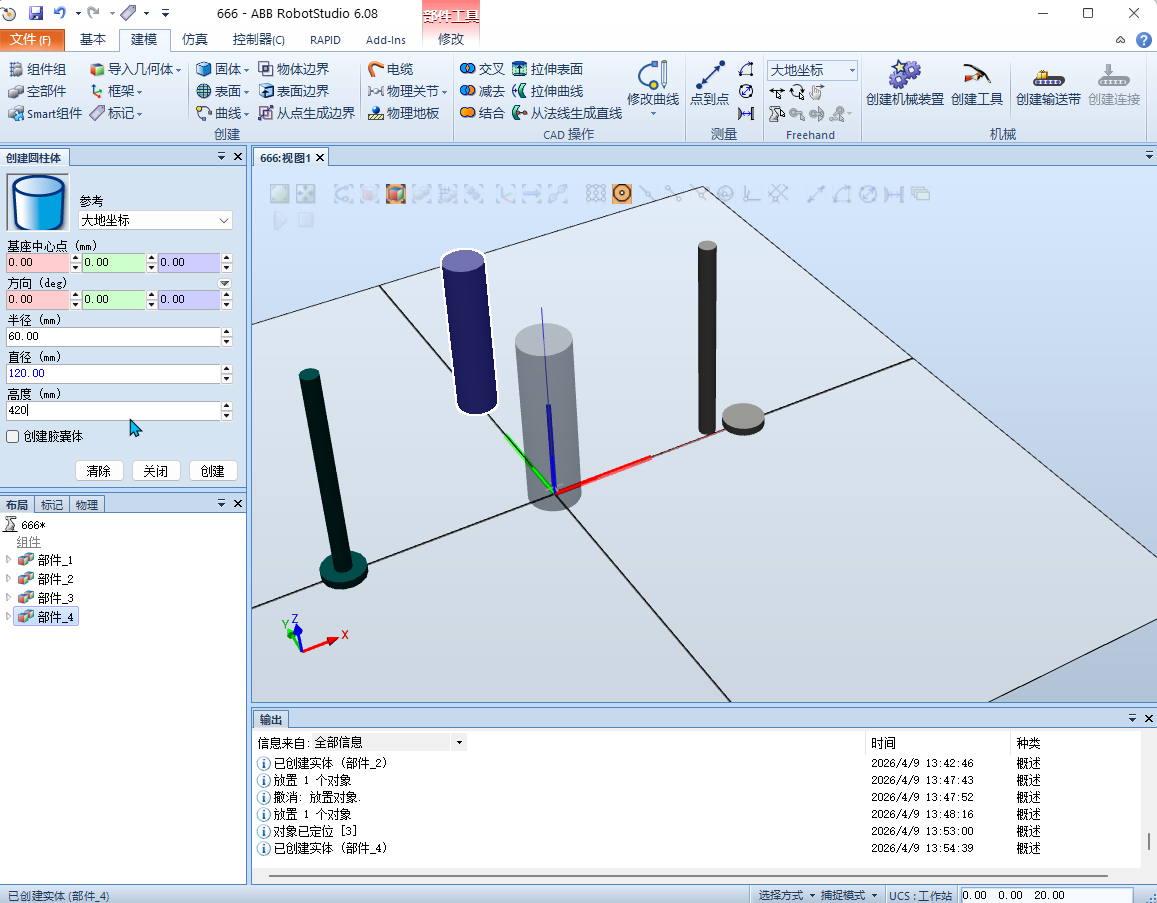
在“建模”功能选项卡中,单击“固体”,选择“圆柱体”,完成内、外套筒的创建(内:直径100mm、高度400mm ;外:直径120mm、高度420mm)。
本例通过“框架法”将套筒组合在一起。在“建模”功能选项卡中,单击“框架”,框架1位置设置为(0;0;20),即定位于外套筒内部。
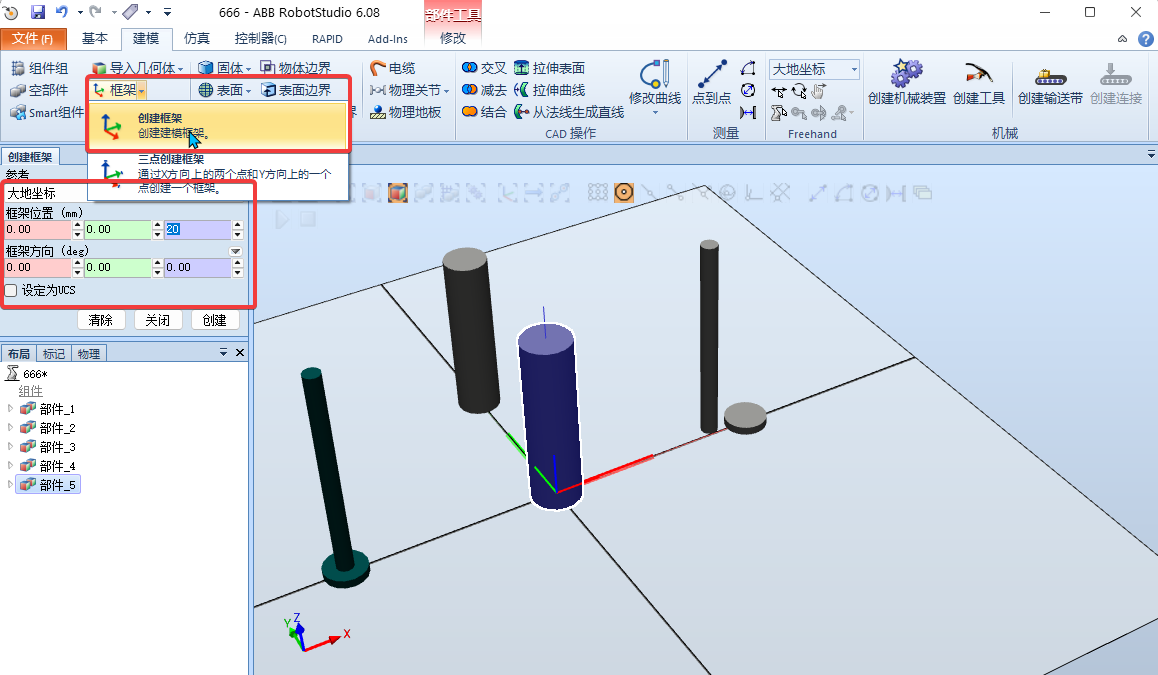
在“建模”功能选项卡中,单击“框架”,框架2位置设置为(0;500;0),即定位于内套筒底面圆心。
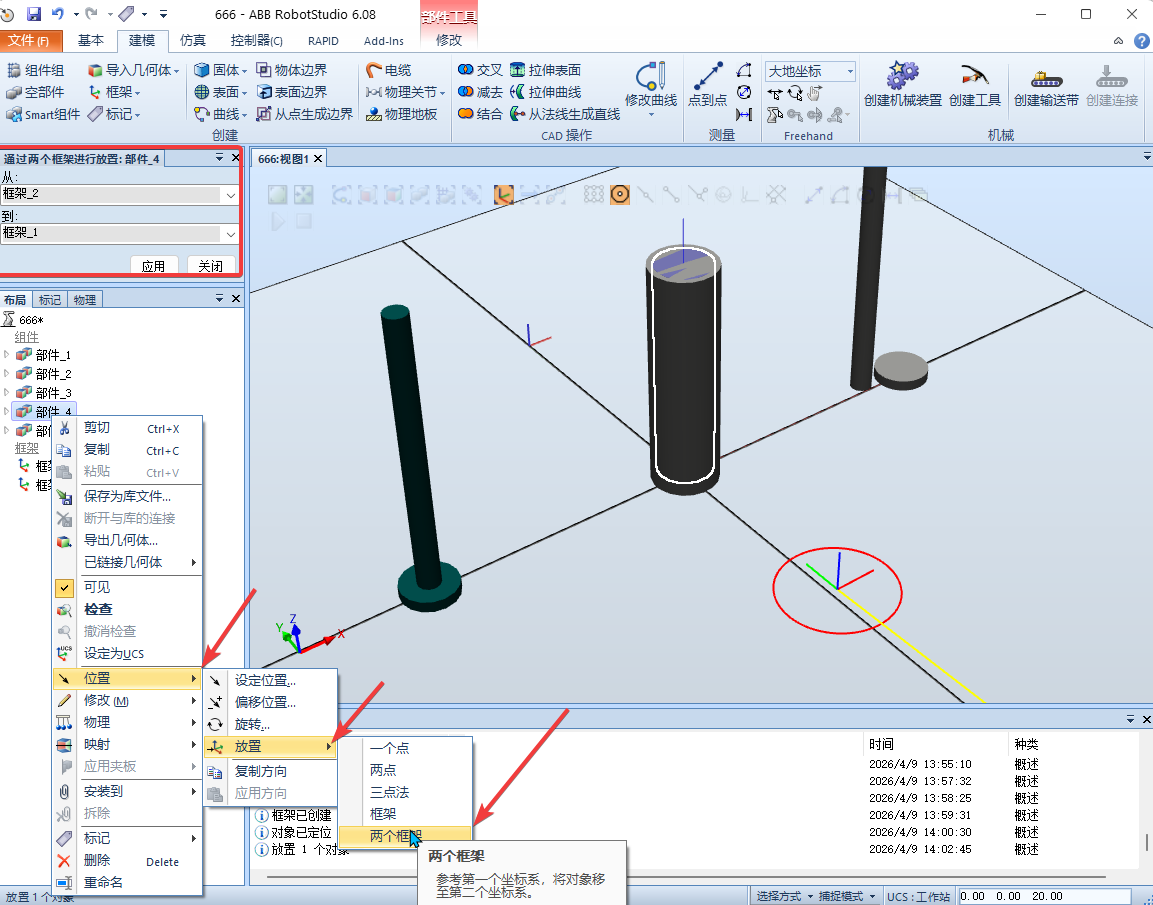
右键单击“部件4”内套筒,设置放置方式“两个框架”。“从框架”选择框架2, “主框架”选择框架1,然后单击确定。
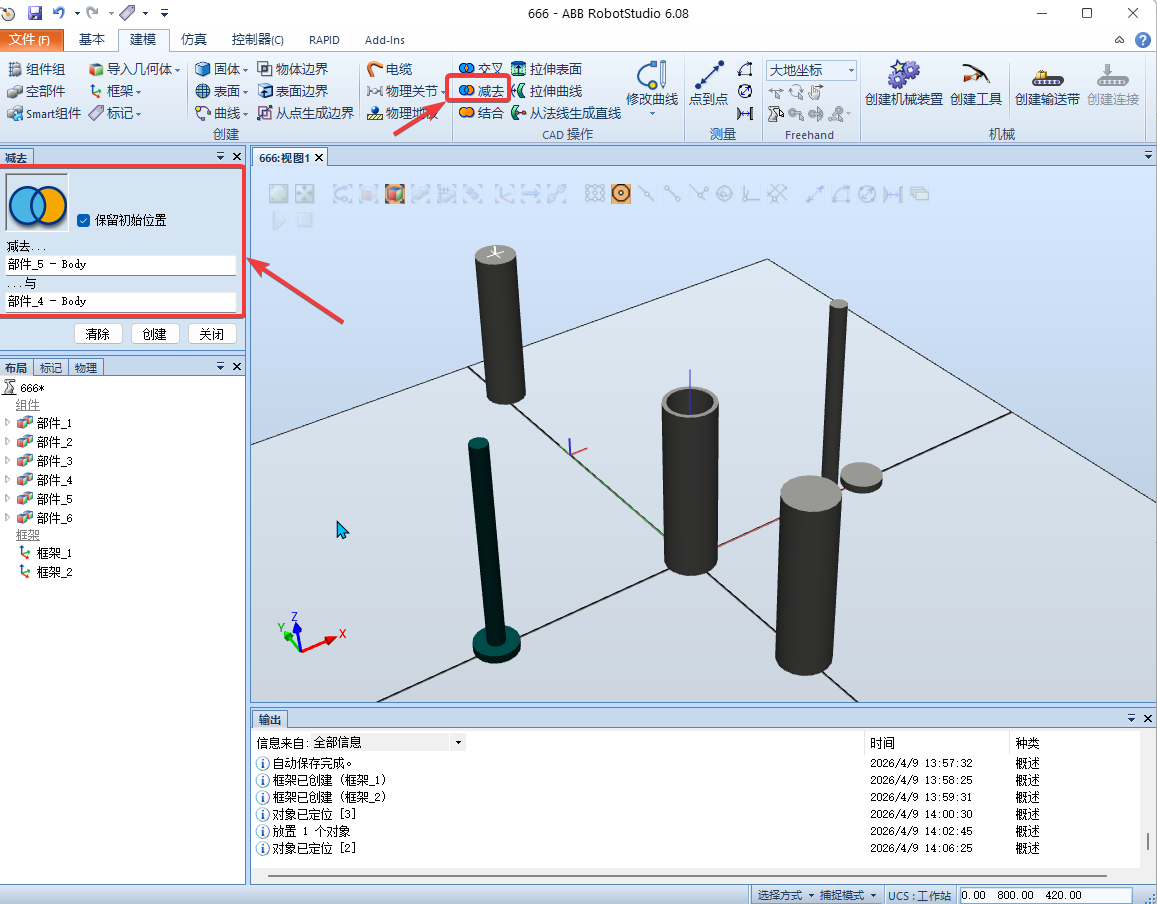
在“建模”功能选项卡中,单击“减去”,减去操作框中第1项选择“部件4”,第2项选择“部件5”,然后单击确定完成求差并移走原部件。
右键单击“部件6”,完成套筒的颜色设置,将“部件3”、“部件6”更名为活塞、套筒,并删除其他部件。
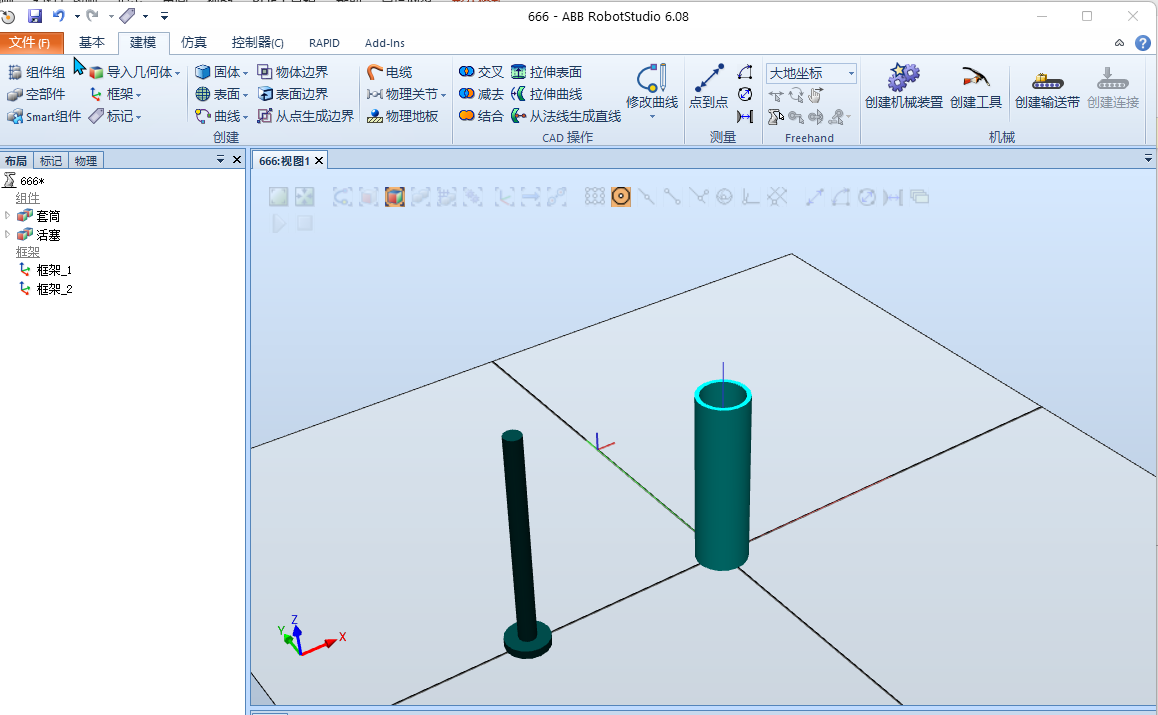
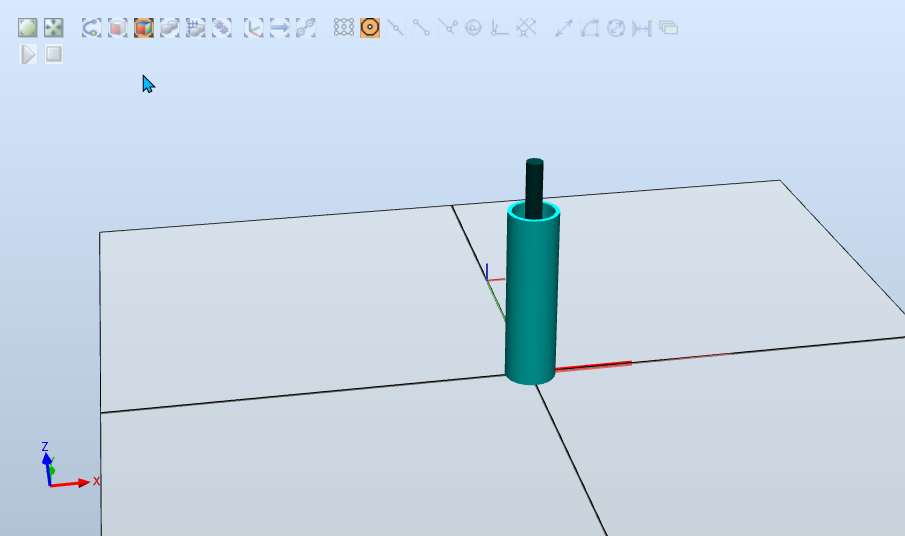
右键单击活塞,设置放置方式“一个点”,单击左上方“主点-从”坐标,选择活塞底面圆的圆心;单击左上方“主点-到”坐标,选择套筒内部上表面圆心,然后单击“确定”完成放置。
2.设置简易活塞的机械运动特性
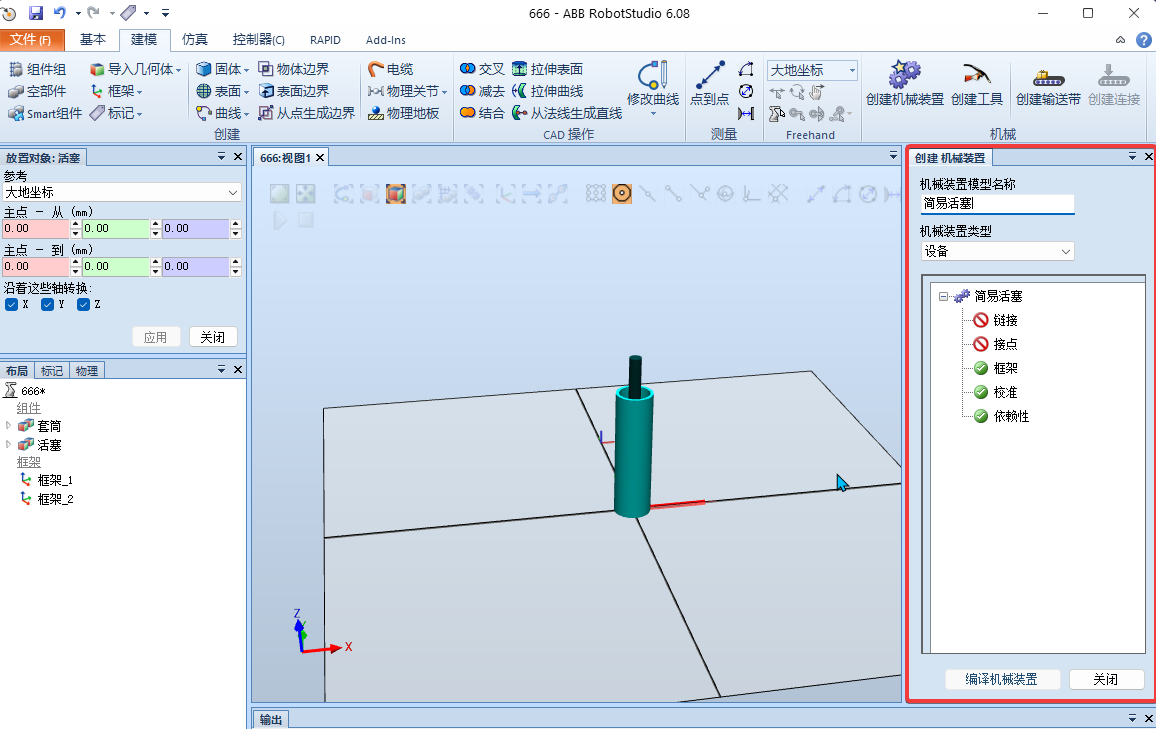
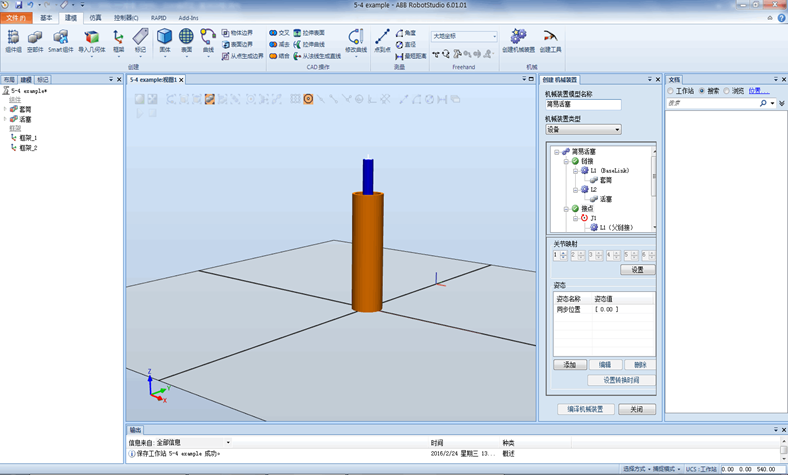
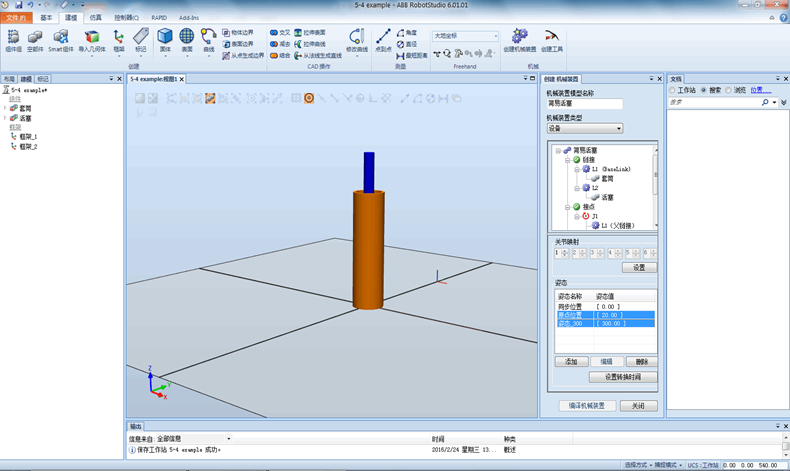
在“建模”功能选项卡中,单击“创建机械装置”,设置机械装置模型名称和类型分别为:简易活塞、设备。
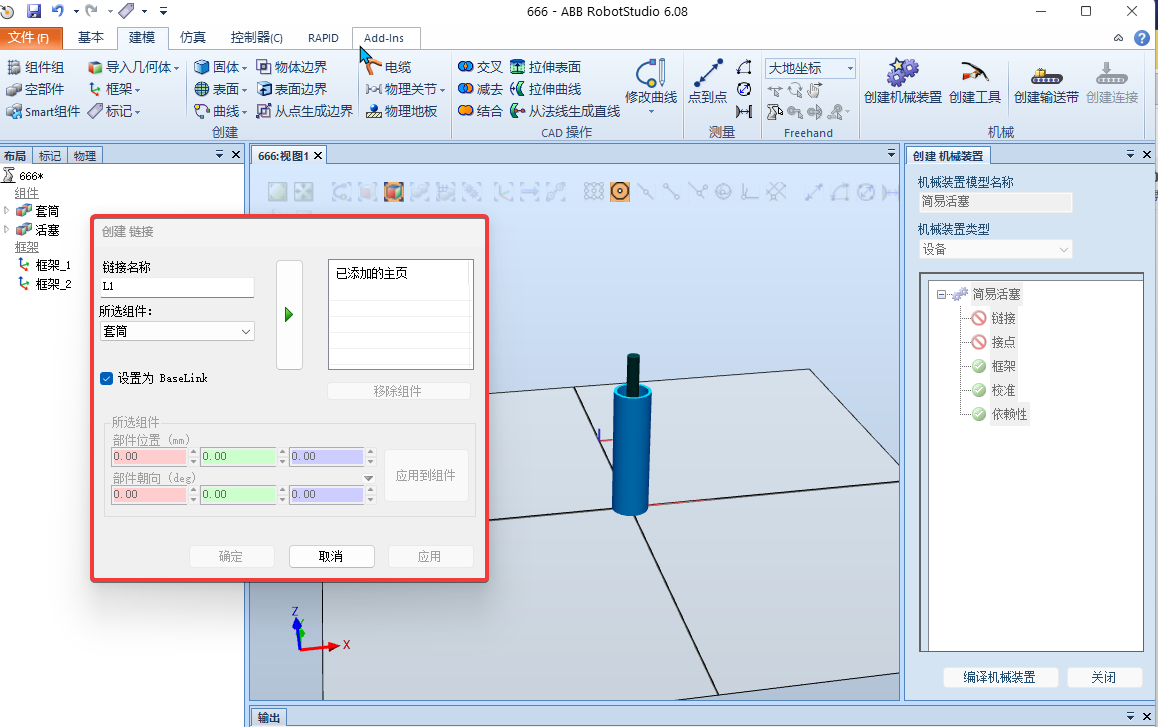
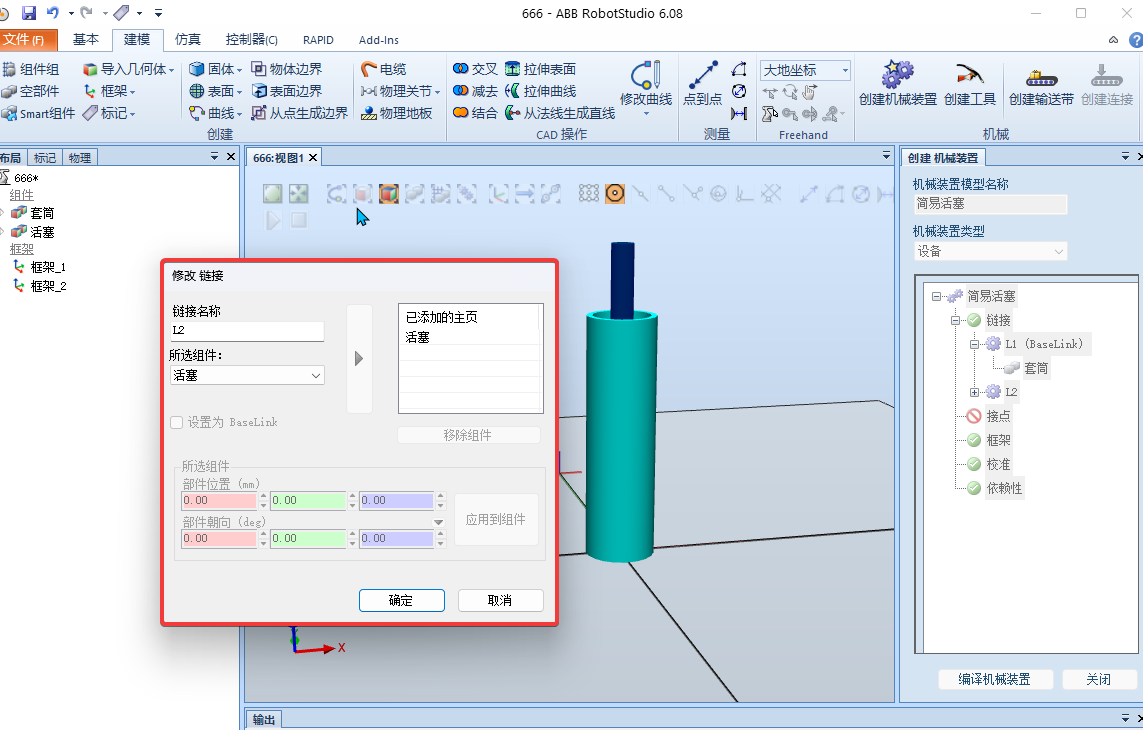
双击“创建机械装置”中的“链接”,链接L1选择部件为套筒并设置为BaseLink,单击应用。链接L2选择部件为活塞,单击应用。
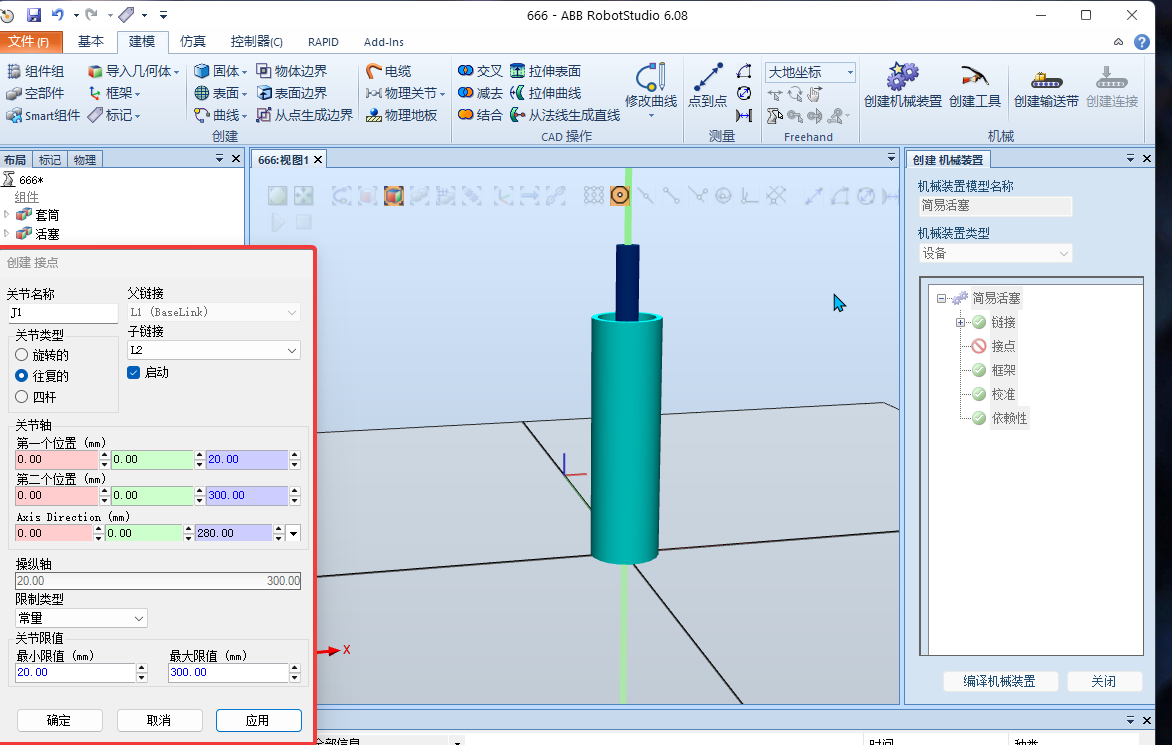
双击“创建机械装置”中的“接点”,设置关节名称:J1,关节类型:往复的,其余参数按照图示设置,然后单击“应用”.
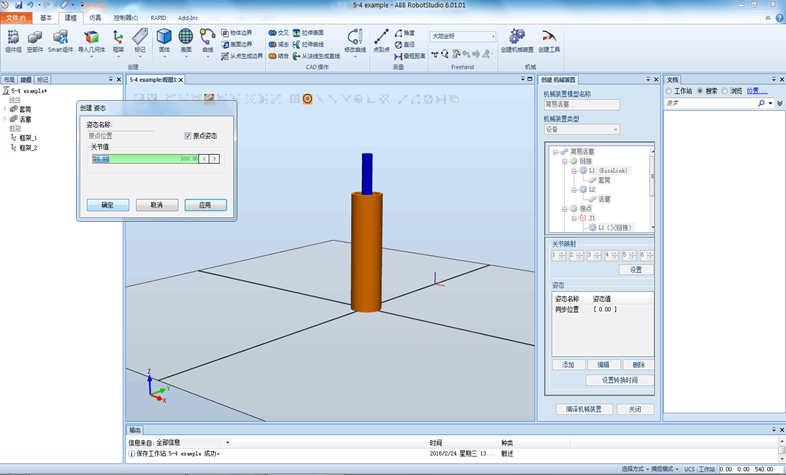
单击“创建机械装置”中的“编译机械装置”,单击右下方“添加”,设置姿态1的关节值:20,同时勾选原点位置,然后单击“应用”.
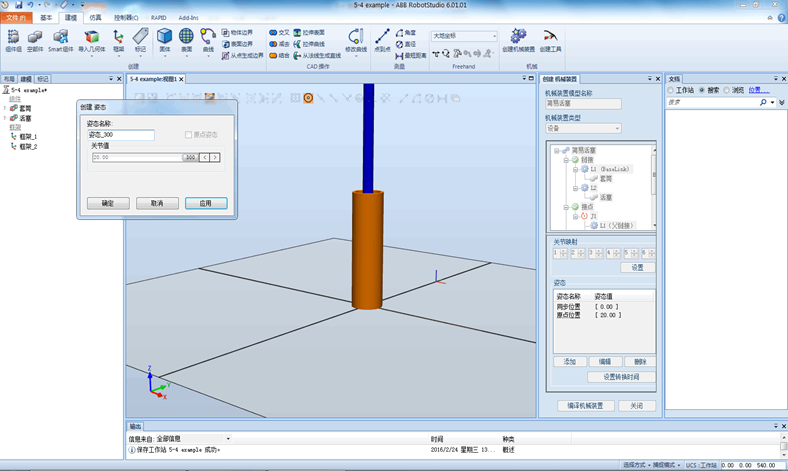
单击右下方“添加”,设置姿态2名称:姿态_300,关节值:300(可拖动滚动条实现),然后单击“确定”。
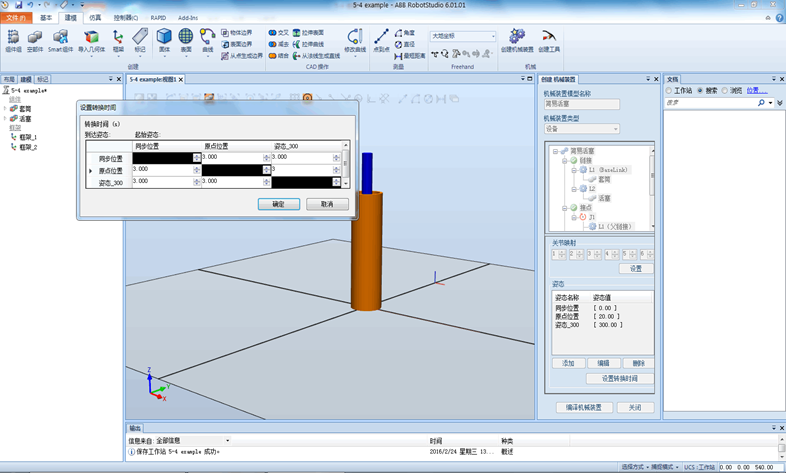
单击右下方“设置转换时间”,设置不同姿态的转换时间,此例均设置为3s,然后单击“确定”,关闭“创建机械装置”。
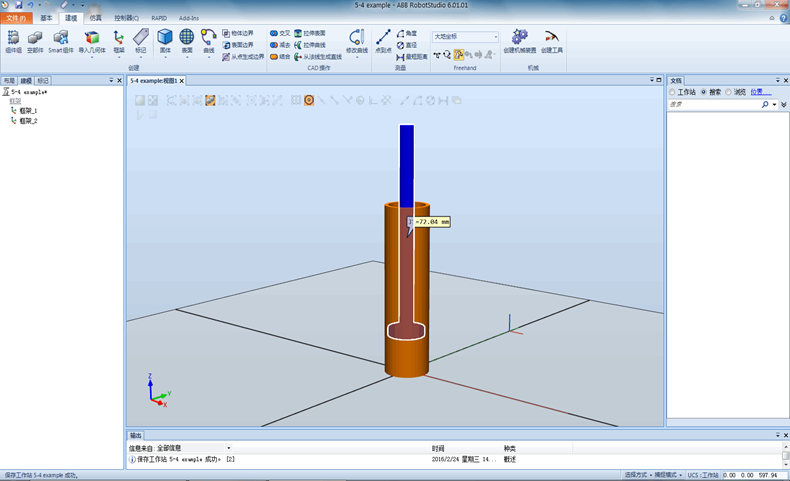
在“建模”功能选项卡中,选择Freehand中的“手动关节”,用鼠标拖动活塞就可以实现上下移动。
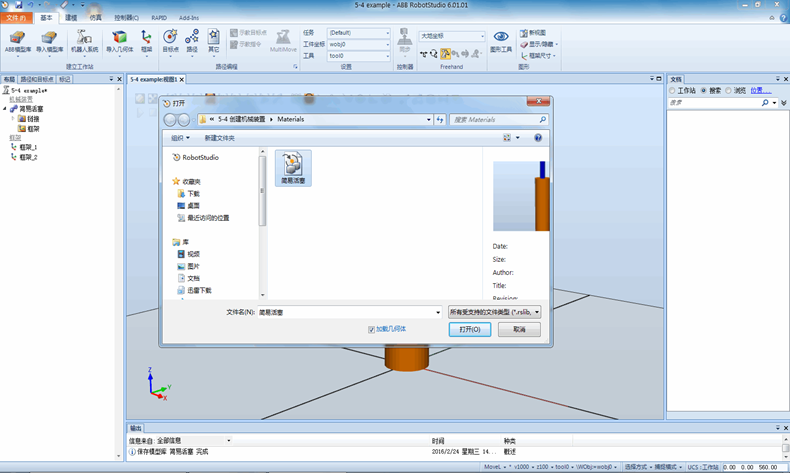
在“基本”功能选项卡中,选中“简易活塞”单击右键,可以将模型保存为库文件,以便后续工作中使用。单击“导入模型库”,选择“浏览库文件”可以加载已保存的机械装置。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 11
11 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)