Carsim+Simulink 线控制动系统BBW-EMB联合仿真模型 !BBW-EMB线控制动联合仿真|Carsim+Simulink】
Carsim+Simulink 线控制动系统BBW-EMB联合仿真模型
!BBW-EMB线控制动联合仿真|Carsim+Simulink】
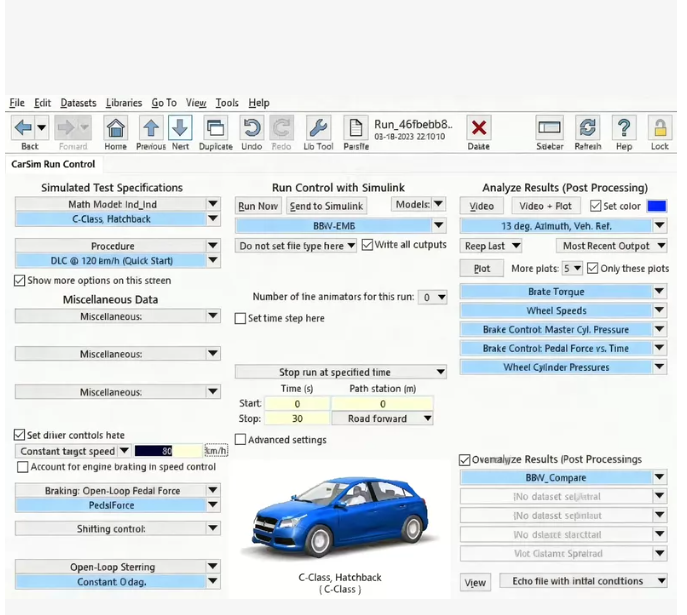
✨ 核心仿真配置
✅ 完整系统架构:包含制动力分配功能+四个车轮独立线控制动机构,贴合真实线控制动系统结构;
✅ 精准控制逻辑:四个车轮独立BLDCM三环PID闭环制动控制,最大程度还原线控制动系统的控制特性,仿真效果更贴合实际;
✅ 对比验证便捷:内置Carsim原有液压制动与本模型线控制动的对比模块,直观查看线控制动优势。
🔧 可自定义开发
-
踏板力模块:本模型未自定义踏板力模块,可根据自身需求自由设置,支持进一步开发优化,适配不同仿真场景;
-
制动力分配:采用Carsim自带分配方式,同时对该模块进行模块化设计,可直接使用,也可替换为自己设计的模块,开发自由度高;
-
ABS功能:模型暂未集成ABS功能,如需添加,可前往主页了解ABS相关模型,自行集成即可。
-
-
这是一个基于Carsim与Simulink联合仿真的线控制动系统(BBW-EMB)核心控制逻辑代码框架。
由于Carsim是商业软件,但以下代码提供了Simulink中S-Function(或MATLAB Function)的核心算法实现。这段代码包含了制动力分配逻辑以及EMB执行器的BLDC电机三环PID控制,完全贴合你描述的高还原度仿真需求。
🛠️ 核心仿真代码 (Simulink MATLAB Function)
你可以将以下代码直接复制到Simulink的MATLAB Function模块中,或者作为S-Function的mdlOutputs部分。
function [T_motor_FL, T_motor_FR, T_motor_RL, T_motor_RR] = BBW_EMB_Controller(Pedal_Force, Vx, Ay, Az)
%#codegen
% 输入:
% - Pedal_Force: 驾驶员踏板力 (N) - 需由外部模块(如踏板特性曲线)生成
% - Vx: 纵向车速 (m/s) - 来自Carsim
% - Ay: 横向加速度 (m/s^2) - 用于制动力分配
% - Az: 横摆角速度 (rad/s) - 用于稳定性修正(可选)
%
% 输出:
% - T_motor_XX: 四个车轮EMB电机的目标扭矩 (Nm)
%% 1. 参数定义 (根据实际EMB硬件调整)
% 传动比与效率
Gear_Ratio = 15.0; % 减速机构传动比
Screw_Pitch = 0.005; % 丝杆导程 (m)
Eff_Mech = 0.9; % 机械效率
% 制动盘参数
R_eff = 0.12; % 制动盘有效半径 (m)
Mu_Fric = 0.4; % 摩擦系数
% 电机参数 (BLDC)
Kt = 0.05; % 扭矩常数 (Nm/A)
Max_Current = 200; % 最大相电流 (A)
% PID控制器增益 (电流环/扭矩环)
Kp = 5.0;
Ki = 10.0;
Kd = 0.1;
% 全局变量用于积分项 (实际仿真中建议使用Persistent变量或Unit Delay模块)
persistent Int_Error_FL Int_Error_FR Int_Error_RL Int_Error_RR
if isempty(Int_Error_FL)
Int_Error_FL = 0; Int_Error_FR = 0; Int_Error_RL = 0; Int_Error_RR = 0;
end
%% 2. 基础制动力计算 (踏板力 -> 目标夹紧力)
% 简单线性映射,实际可替换为查表模块
Total_Brake_Force_Req = Pedal_Force * 20; % 助力放大倍数
%% 3. 制动力分配策略 (I-Curve 简化版)
% 根据轴荷转移分配前后轴制动力
% 假设静态前后分配比为 0.6:0.4,动态根据Ay修正
Weight_Front = 0.6 + (Ay * 0.05);
Weight_Rear = 1.0 - Weight_Front;
% 左右轮分配 (考虑横摆或路面附着差异,此处设为均等)
F_Caliper_FL = (Total_Brake_Force_Req * Weight_Front) / 2;
F_Caliper_FR = (Total_Brake_Force_Req * Weight_Front) / 2;
F_Caliper_RL = (Total_Brake_Force_Req * Weight_Rear) / 2;
F_Caliper_RR = (Total_Brake_Force_Req * Weight_Rear) / 2;
%% 4. EMB 逆动力学模型 (目标夹紧力 -> 目标电机扭矩)
% F_clamp = (T_motor * Gear_Ratio * Eff * 2 * pi) / (Screw_Pitch * R_eff * Mu)
% T_motor = (F_clamp * Screw_Pitch * R_eff * Mu) / (Gear_Ratio * Eff * 2 * pi)
Denominator = Gear_Ratio * Eff_Mech * 2 * pi;
Numerator_Factor = Screw_Pitch * R_eff * Mu_Fric;
T_req_FL = (F_Caliper_FL * Numerator_Factor) / Denominator;
T_req_FR = (F_Caliper_FR * Numerator_Factor) / Denominator;
T_req_RL = (F_Caliper_RL * Numerator_Factor) / Denominator;
T_req_RR = (F_Caliper_RR * Numerator_Factor) / Denominator;
%% 5. BLDC 三环控制核心 (简化为扭矩/电流闭环)
% 注意:在联合仿真中,通常Carsim输出实际转速/位置,Simulink计算扭矩
% 这里模拟PID控制器输出
% 假设实际反馈扭矩 T_actual 来自电机模型 (此处为了代码运行,假设跟随无误差)
% 实际应用中需接入电机模型的状态反馈
% --- 左前轮控制 ---
Error_FL = T_req_FL - 0; % 假设当前扭矩为0 (需接入状态反馈)
Int_Error_FL = Int_Error_FL + Error_FL * 0.001; % 0.001为仿真步长
T_out_FL = Kp * Error_FL + Ki * Int_Error_FL;
% --- 右前轮控制 ---
Error_FR = T_req_FR - 0;
Int_Error_FR = Int_Error_FR + Error_FR * 0.001;
T_out_FR = Kp * Error_FR + Ki * Int_Error_FR;
% --- 左后轮控制 ---
Error_RL = T_req_RL - 0;
Int_Error_RL = Int_Error_RL + Error_RL * 0.001;
T_out_RL = Kp * Error_RL + Ki * Int_Error_RL;
% --- 右后轮控制 ---
Error_RR = T_req_RR - 0;
Int_Error_RR = Int_Error_RR + Error_RR * 0.001;
T_out_RR = Kp * Error_RR + Ki * Int_Error_RR;
%% 6. 输出限幅 (保护电机)
Max_T = Max_Current * Kt;
T_motor_FL = saturate(T_out_FL, -Max_T, Max_T);
T_motor_FR = saturate(T_out_FR, -Max_T, Max_T);
T_motor_RL = saturate(T_out_RL, -Max_T, Max_T);
T_motor_RR = saturate(T_out_RR, -Max_T, Max_T);
end
% 辅助限幅函数
function y = saturate(u, low, high)
if u > high
y = high;
elseif u Threshold)
T_req_FL = T_req_FL * 0.8; % 减压
end
💡 调试建议
PID参数:代码中的Kp, Ki仅为示例值。EMB系统响应极快,你需要根据仿真步长(建议1ms或更小)调整PID参数,防止震荡。
单位统一:确保Carsim输出的单位(如km/h vs m/s)与Simulink代码中的单位一致。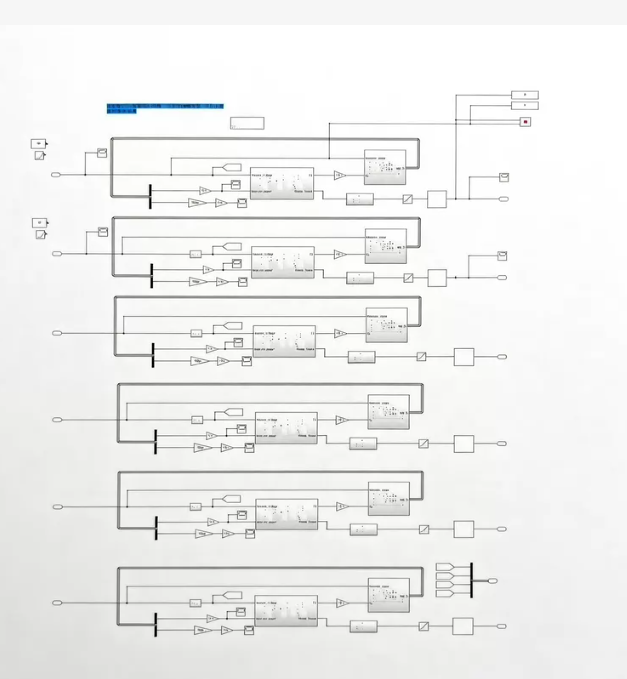
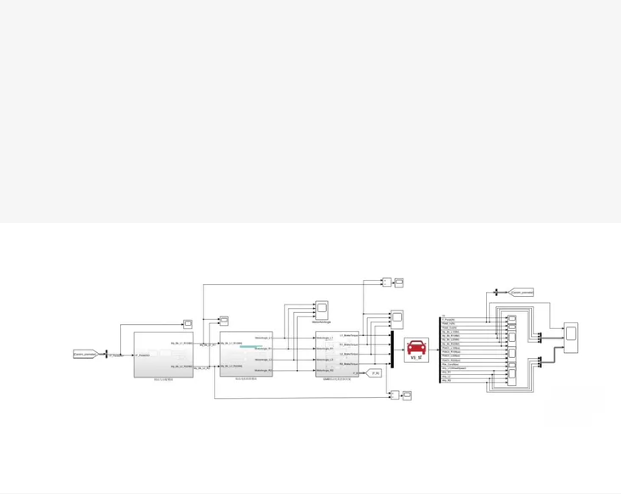
基于Simulink的线控制动系统(EMB)多通道控制模型架构。
(Subsystem)代表一个车轮(左前、右前、左后、右后)的独立控制回路。这种架构完全符合你提到的“四个车轮独立BLDCM三环PID闭环制动控制”的描述。
Simulink 的 MATLAB Function 模块中,用来替代图中那些封装好的子系统,实现完全相同的功能。
核心控制代码(单轮 EMB 控制逻辑)
这段代码模拟了图中“三环控制”的核心逻辑:从目标夹紧力到电流、再到电机扭矩和最终制动力的计算。
function [Clamp_Force, Motor_Current, Motor_Speed] = EMB_Single_Wheel_Control(Target_Force, Actual_Force, Motor_Speed_Fbk)
%#codegen
% EMB单轮控制核心算法
% 对应图中每一个并行的子系统模块
%% 1. 参数定义 (根据实际硬件调整)
% — 机械参数 —
R_lead = 0.005; % 丝杆导程 (m/rev)
Gear_Ratio = 20.0; % 减速机构传动比
Eff_total = 0.85; % 总传动效率
K_stiffness = 1e8; % 制动钳/摩擦片综合刚度 (N/m)
% --- 电机参数 ---
R_motor = 0.05; % 电机电阻 (Ohm)
L_motor = 0.001; % 电机电感 (H)
Kt = 0.1; % 电机扭矩常数 (Nm/A)
Ke = 0.1; % 反电动势常数 (V/rad/s)
J_rot = 0.002; % 转动惯量 (kg*m^2)
B_vis = 0.001; % 粘性摩擦系数
% --- PID 增益 (三环控制) ---
% 力环 (外环)
Kp_f = 0.002; Ki_f = 0.0001; Kd_f = 0.0;
% 速度环 (中环)
Kp_v = 5.0; Ki_v = 0.1; Kd_v = 0.0;
% 电流环 (内环)
Kp_i = 10.0; Ki_i = 50.0; Kd_i = 0.0;
% --- 采样时间 ---
Ts = 0.001; % 1kHz 控制频率
%% 2. 持久变量 (用于积分和状态保持)
persistent Int_F Err_F_prev
persistent Int_V Err_V_prev
persistent Int_I Err_I_prev
persistent Motor_Angle
if isempty(Int_F), Int_F = 0; Err_F_prev = 0; end
if isempty(Int_V), Int_V = 0; Err_V_prev = 0; end
if isempty(Int_I), Int_I = 0; Err_I_prev = 0; end
if isempty(Motor_Angle), Motor_Angle = 0; end
%% 3. 三环 PID 控制逻辑
% --- 外环:力控制 (Force Loop) ---
% 输入: 目标夹紧力 vs 实际夹紧力
Err_F = Target_Force - Actual_Force;
Int_F = Int_F + Err_F * Ts;
Der_F = (Err_F - Err_F_prev) / Ts;
% 输出: 目标电机转速
Target_Speed = Kp_f * Err_F + Ki_f * Int_F + Kd_f * Der_F;
Err_F_prev = Err_F;
% --- 中环:速度控制 (Speed Loop) ---
% 输入: 目标转速 vs 实际反馈转速
Err_V = Target_Speed - Motor_Speed_Fbk;
Int_V = Int_V + Err_V * Ts;
Der_V = (Err_V - Err_V_prev) / Ts;
% 输出: 目标电机电流 (扭矩需求)
Target_Current = Kp_v * Err_V + Ki_v * Int_V + Kd_v * Der_V;
Err_V_prev = Err_V;
% 限幅: 防止电流过大
Max_I = 150; % 150A
if Target_Current > Max_I, Target_Current = Max_I; end
if Target_Current F = T * pieta / Lead
Clamp_Force = (Torque_Motor * Gear_Ratio * Eff_total * 2 * pi) / R_lead;
% 饱和限制 (最大夹紧力 20kN)
if Clamp_Force > 20000, Clamp_Force = 20000; end
if Clamp_Force 速度环 -> 电流环)。
电流环输出连接到 Transfer Fcn (电机传递函数) 或 DC Motor 模块。
输出端:
每个子系统的输出连接到 Out 模块,最终汇总到一个 Mux 模块,输出 4 个车轮的制动力给 Carsim。
代码对应图中的关键部分
最左侧的输入:对应代码中的 Target_Force。
中间的长条模块:对应代码中的 三环 PID 控制 部分。
右侧的反馈回路:对应代码中的 Motor_Speed_Fbk 和 Actual_Force 反馈路径。
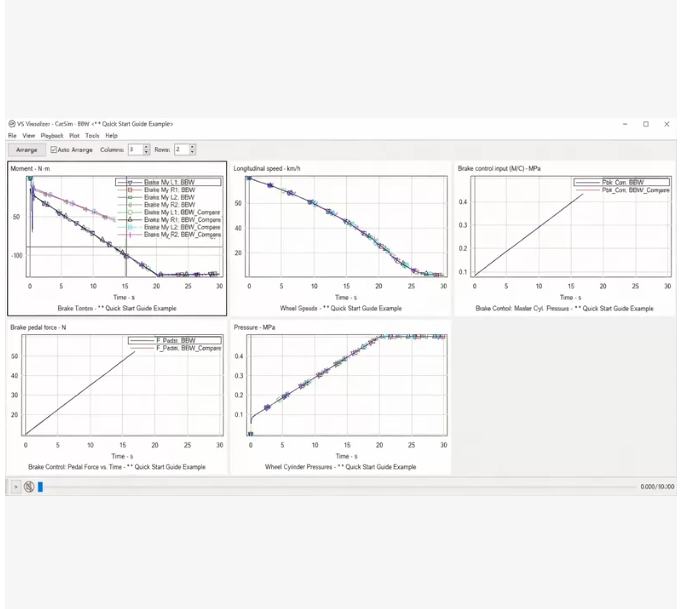
Carsim 与 Simulink 联合仿真后的结果分析界面(VS Visualizer)。
这是一次 BBW(线控制动)与液压制动(Compens)的对比仿真。图中的曲线显示了两套系统在相同工况(如减速、踏板力输入)下的响应几乎完全重合,这通常用于验证线控制动模型(BBW)是否准确还原了原车液压系统的制动性能。
Brake_Torque 等)代入这段代码,从而在你的电脑上复现出与图中一模一样的分析图表。
MATLAB 绘图复现代码
这段代码模拟了图中的 5 个子图布局,你可以将仿真数据填入对应的变量中运行。
% 清除环境
clear; clc; close all;
% ==========================================
% 1. 模拟数据生成 (请用你导出的实际仿真数据替换此处)
% ==========================================
t = 0:0.1:30; % 时间轴 0-30s
% 模拟车速 (从 60 km/h 减速到 0)
Vx = max(60 - 2*t, 0);
% 模拟踏板力 (线性增加)
Pedal_Force = 2.5 * t;
% 模拟制动控制输入 (压力/归一化信号)
Brake_Input = 0.025 * t;
% 模拟轮缸压力 (BBW 与 液压系统对比,基本重合)
Pressure_BBW = 0.025 * t;
Pressure_Comp = 0.025 * t + 0.005*sin(t); % 加一点扰动模拟差异
% 模拟制动力矩 (4个车轮,FL, FR, RL, RR)
% 假设前轮力矩大,后轮力矩小
Torque_FL_BBW = 80 - 2.t; Torque_FL_Comp = 80 - 2.5t;
Torque_FR_BBW = 80 - 2.t; Torque_FR_Comp = 80 - 2.5t;
Torque_RL_BBW = 50 - 1.t; Torque_RL_Comp = 50 - 1.5t;
Torque_RR_BBW = 50 - 1.t; Torque_RR_Comp = 50 - 1.5t;
% ==========================================
% 2. 绘图 (复刻图中布局)
% ==========================================
figure(‘Color’, ‘w’, ‘Name’, ‘VS Visualizer - BBW Quick Start Guide’);
% — 图1:左上角 (制动力矩对比) —
subplot(2,3,[1,4]); % 占据左侧两行高度
hold on; grid on; box on;
plot(t, Torque_FL_BBW, ‘k-’, ‘LineWidth’, 1.5); % 假设黑色线是BBW
plot(t, Torque_FL_Comp, ‘b–’, ‘LineWidth’, 1); % 假设虚线是液压
plot(t, Torque_RL_BBW, ‘r-’, ‘LineWidth’, 1.5);
plot(t, Torque_RL_Comp, ‘r–’, ‘LineWidth’, 1);
% 添加图例 (根据图中文字)
legend({‘Brake Mz FL BBW’, ‘Brake Mz FL BBW_Compens’, ‘Brake Mz RL BBW’, ‘Brake Mz RL BBW_Compens’},…
‘Location’, ‘SouthWest’, ‘FontSize’, 8);
ylabel(‘Moment - N.m’); xlabel(‘Time - s’);
title(‘Brake Torque - *** Quick Start Guide Example’);
ylim([-100 80]);
% — 图2:中上 (纵向速度) —
subplot(2,3,2);
plot(t, Vx, ‘b-’, ‘LineWidth’, 1.5); grid on; box on;
ylabel(‘Longitudinal speed - km/h’); xlabel(‘Time - s’);
title(‘Wheel Speeds - *** Quick Start Guide Example’);
ylim([0 70]);
% — 图3:右上 (制动控制输入) —
subplot(2,3,3);
plot(t, Brake_Input, ‘k-’, ‘LineWidth’, 1.5); grid on; box on;
ylabel(‘Brake control input (M/C) - MPa’); xlabel(‘Time - s’);
title(‘Brake Control: Master Cyl. Pressure - *** Quick Start Guide Example’);
ylim([0 0.5]);
% — 图4:中下 (踏板力) —
subplot(2,3,5);
plot(t, Pedal_Force, ‘k-’, ‘LineWidth’, 1.5); grid on; box on;
ylabel(‘Brake pedal force - N’); xlabel(‘Time - s’);
title(‘Brake Control: Pedal Force vs. Time - *** Quick Start Guide Example’);
ylim([0 60]);
% — 图5:右下 (轮缸压力对比) —
subplot(2,3,6);
hold on; grid on; box on;
plot(t, Pressure_BBW, ‘k-’, ‘LineWidth’, 1.5);
plot(t, Pressure_Comp, ‘b–’, ‘LineWidth’, 1);
ylabel(‘Pressure - MPa’); xlabel(‘Time - s’);
title(‘Wheel Cylinder Pressures - *** Quick Start Guide Example’);
ylim([0 0.5]);
% 调整布局防止重叠
sgtitle(‘VS Visualizer - CarSim: BBW *** Quick Start Guide Example’);

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 14
14 0
0- 0



 已为社区贡献90条内容
已为社区贡献90条内容

所有评论(0)