安全锥(路锥/雪糕筒)检测数据集(6000张高质量标注)|YOLO目标检测数据集
安全锥(路锥/雪糕筒)检测数据集(6000张高质量标注)|YOLO目标检测数据集
前言
在智能交通、自动驾驶与道路安全管理等领域中,道路临时设施的识别是环境感知的重要组成部分。其中,安全锥(路锥)作为最常见的临时交通引导设施,广泛应用于道路施工、事故隔离与交通管控场景。
由于安全锥通常具有小目标、易遮挡、形态变化(倾倒/破损)以及复杂背景干扰等特点,对目标检测模型提出了较高要求。因此,一个覆盖多场景、多状态的高质量数据集,对于提升模型的检测精度与鲁棒性具有重要意义。
本文介绍一个专注于安全锥检测任务的数据集,可直接用于 YOLO 系列等主流目标检测模型的训练与工程落地。
数据集下载链接
通过网盘分享的文件:安全锥路锥雪糕筒检测数据集
链接: https://pan.baidu.com/s/1iExDkTITvmDLtuKBqqkbEw?pwd=qdhm
提取码: qdhm
一、数据集概述
本数据集面向安全锥(交通锥)目标检测任务构建,提供高质量、标准化的数据支撑,适用于多种视觉感知场景。
数据集基本信息如下:
- 数据规模:约 6000 张图像
- 标注类型:目标检测(Bounding Box)
- 标注格式:YOLO 标准格式
- 类别数量:1 类(nc = 1)
- 类别名称:交通锥
- 数据结构:训练集 / 验证集 / 测试集
数据集采用标准组织形式,可直接适配 YOLOv5、YOLOv8、Faster R-CNN 等主流检测框架,无需额外转换。
二、背景
安全锥在道路场景中承担重要功能:
- 引导车辆行驶路径
- 隔离施工区域
- 标识危险区域
在自动驾驶或智能巡检系统中,对安全锥的准确识别可用于:
- 路径规划调整
- 风险区域识别
- 临时交通环境建模
传统方法(如颜色分割)在以下情况下容易失效:
- 光照变化(夜间、阴影)
- 背景干扰(复杂道路环境)
- 安全锥倾倒或部分遮挡
因此,基于深度学习的目标检测方法成为主流解决方案,而高质量数据集是实现稳定检测性能的前提。
三、数据集详情
3.1 数据结构
数据集采用标准目录结构:
train/images
valid/images
test/images
对应标签文件与图像文件同名,格式为 .txt,可直接用于训练。
3.2 类别定义
数据集为单类别检测任务:
| 类别ID | 类别名称 |
|---|---|
| 0 | 交通锥 |
单类别设计有助于模型专注学习目标特征,减少类别间干扰,提高检测精度与训练效率。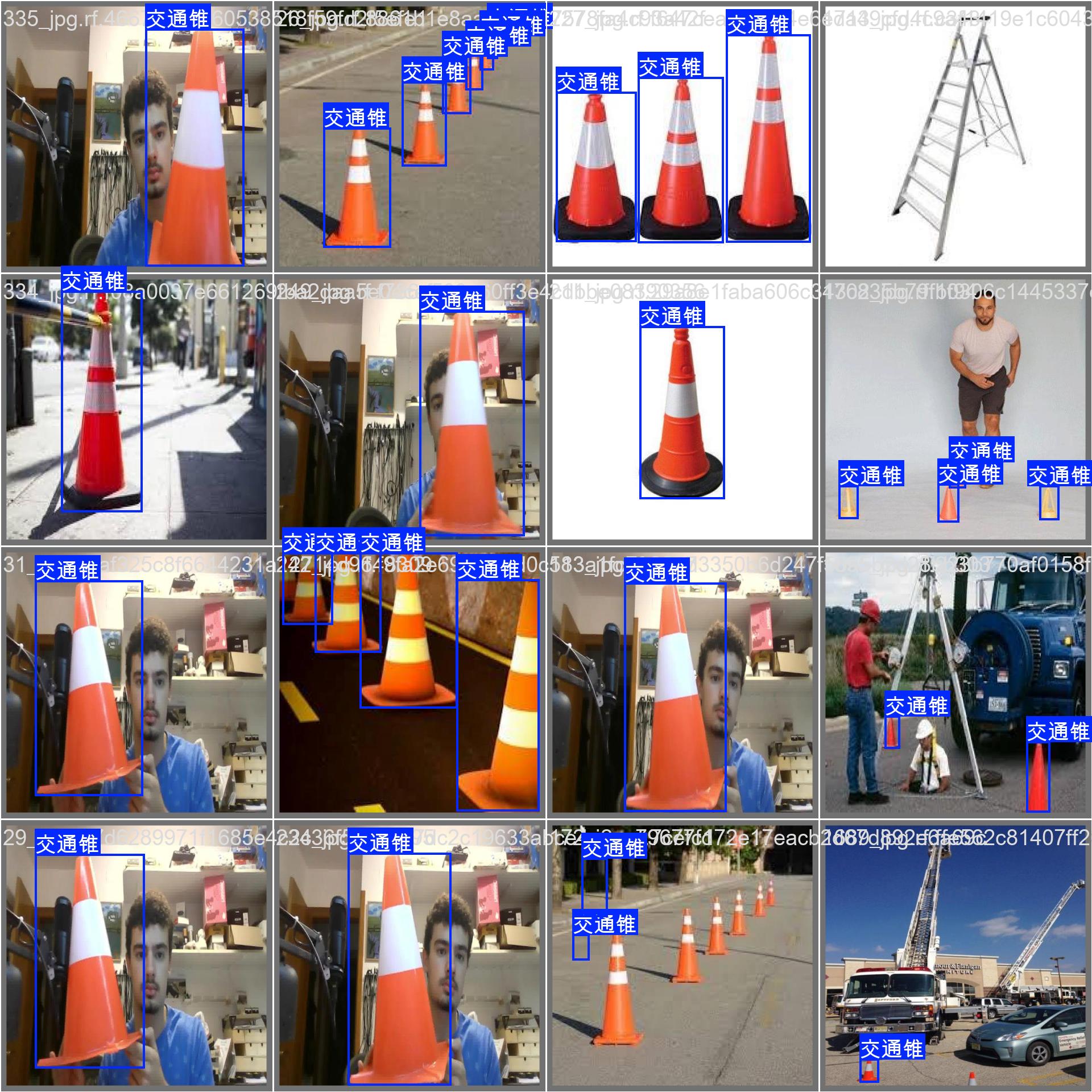
3.3 数据特性分析
(1)多场景覆盖
数据来源于真实交通环境,包括:
- 道路施工区域
- 交通事故现场
- 城市道路
- 高速公路
- 停车场
具备较强的实际应用价值。
(2)多条件变化
数据覆盖多种复杂条件:
- 光照变化(白天 / 夜晚 / 阴天 / 雨天)
- 拍摄角度变化(俯视 / 侧视)
- 距离变化(近景 / 远景)
有助于提升模型泛化能力。
(3)目标状态多样
数据包含多种安全锥状态:
- 正常直立
- 倾倒
- 部分遮挡
- 多目标密集分布
能够有效模拟真实应用中的复杂情况。
(4)标注质量
- 边界框贴合目标轮廓
- 标注一致性高
- 多轮人工校验
- 无明显漏标或误标
高质量标注为模型提供可靠监督信号。
3.4 标注格式
YOLO 标准格式如下:
class_id x_center y_center width height
示例:
0 0.48 0.52 0.12 0.25
说明:
- 坐标为归一化值(0~1)
- 单类别任务中 class_id 固定为 0
四、模型训练适配(YOLOv8)
4.1 数据配置文件
path: /dataset/path
train: train/images
val: valid/images
names:
0: cone
4.2 训练命令
yolo detect train \
data=data.yaml \
model=yolov8n.pt \
epochs=100 \
imgsz=640 \
batch=16
4.3 参数建议
| 参数 | 推荐值 |
|---|---|
| model | yolov8n / yolov8s |
| epochs | 100~200 |
| imgsz | 640 |
| batch | 8~16 |
4.4 训练策略建议
- 启用 Mosaic 数据增强
- 使用多尺度训练
- 适当提高输入分辨率(如 768)
- 调整学习率避免过拟合
五、适用场景
5.1 自动驾驶感知
- 安全锥检测
- 路径规划辅助
- 临时路况识别
5.2 道路施工监控
- 检测安全锥摆放情况
- 识别缺失或倾倒
- 提升施工安全管理水平
5.3 智能巡检系统
- 自动巡检道路设施
- 替代人工巡查
- 提升巡检效率
5.4 机器人导航
- 环境障碍识别
- 路径避障
- 提升导航安全性
5.5 教学与科研
- 单类别目标检测实验
- 小目标检测研究
- 模型优化验证
六、实践经验与优化建议
6.1 小目标检测问题
远距离安全锥尺寸较小:
- 检测难度较大
建议:
- 提高输入分辨率(如 768 或 1024)
- 使用多尺度训练
6.2 背景干扰问题
安全锥颜色与部分环境相似:
- 易出现误检
建议:
- 增强数据多样性
- 引入颜色与形状联合特征
6.3 遮挡与密集目标
多目标场景中:
- 容易出现重叠
建议:
- 调整 NMS 阈值
- 使用更强模型(YOLOv8s)
6.4 部署建议
- 导出 ONNX / TensorRT 模型
- 部署至车载或边缘设备
- 支持实时视频检测
6.5 可扩展方向
- 增加其他交通设施类别(如路牌、护栏)
- 结合语义分割(精细轮廓检测)
- 引入目标跟踪(连续帧分析)
七、心得
从工程应用角度来看,该数据集具备以下优势:
- 单类别设计,训练目标明确
- 数据规模适中,易于训练与调优
- 场景覆盖全面,泛化能力较强
- 标注规范,可直接用于主流框架
特别适合用于自动驾驶与智能交通相关项目的快速开发与验证。
八、结语
本文对安全锥检测数据集进行了系统介绍,包括数据结构、标注方式、训练方法及应用场景。该数据集在道路安全与自动驾驶感知领域具有较高实用价值,可作为目标检测模型开发的重要数据基础。
在实际应用中,建议结合具体业务需求进行数据扩展与模型优化,以进一步提升检测性能与系统稳定性,从而更好地适应复杂多变的道路环境。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 9
9 0
0- 0



 已为社区贡献198条内容
已为社区贡献198条内容

所有评论(0)