mpc模型预测控制从原理到代码实现 mpc模型预测控制详细原理推导 matlab和c++两种编程实现
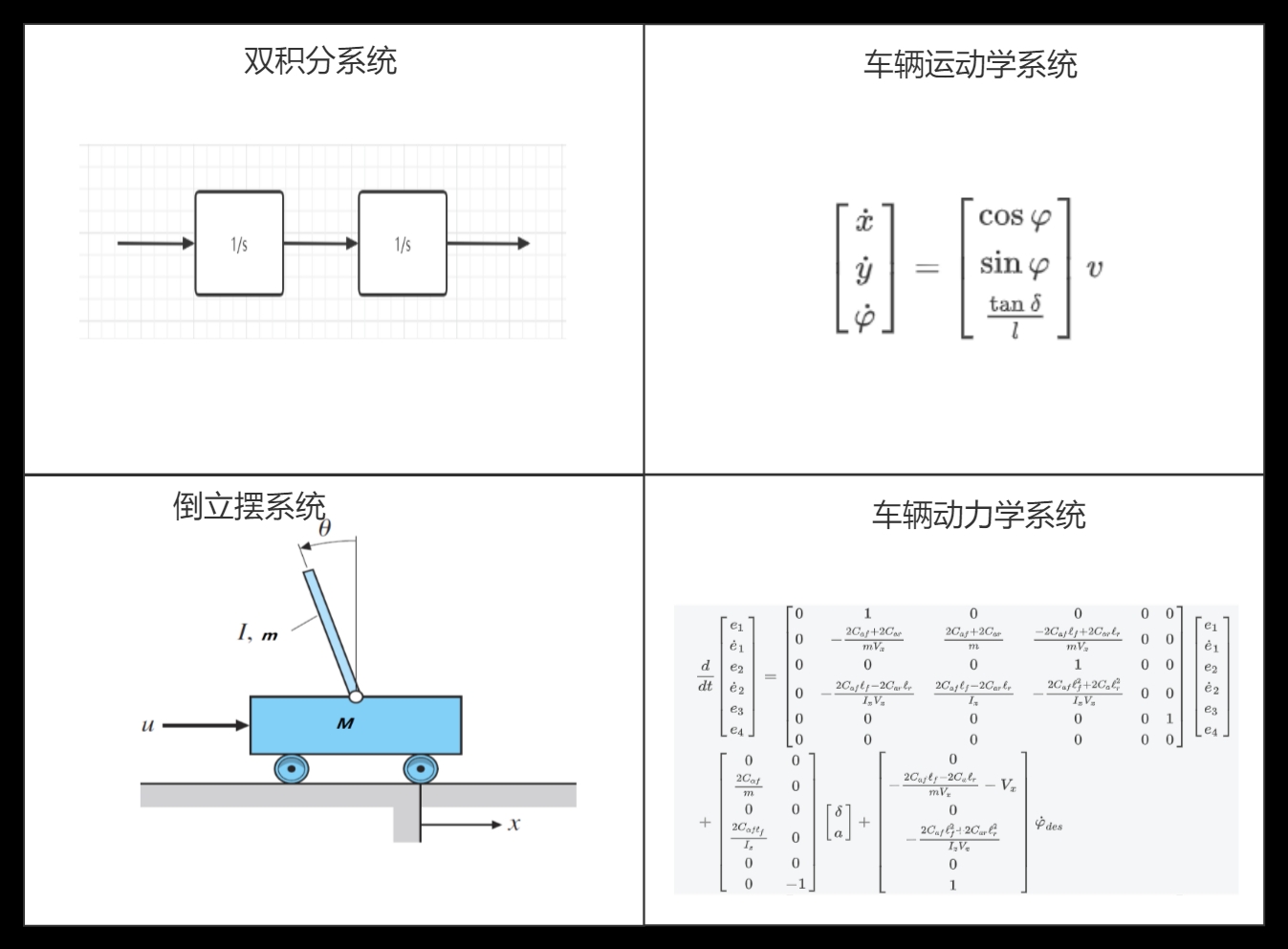
mpc模型预测控制从原理到代码实现 mpc模型预测控制详细原理推导 matlab和c++两种编程实现 四个实际控制工程案例: 双积分控制系统 倒立摆控制系统 车辆运动学跟踪控制系统 车辆动力学跟踪控制系统 包含上述所有的文档和代码。
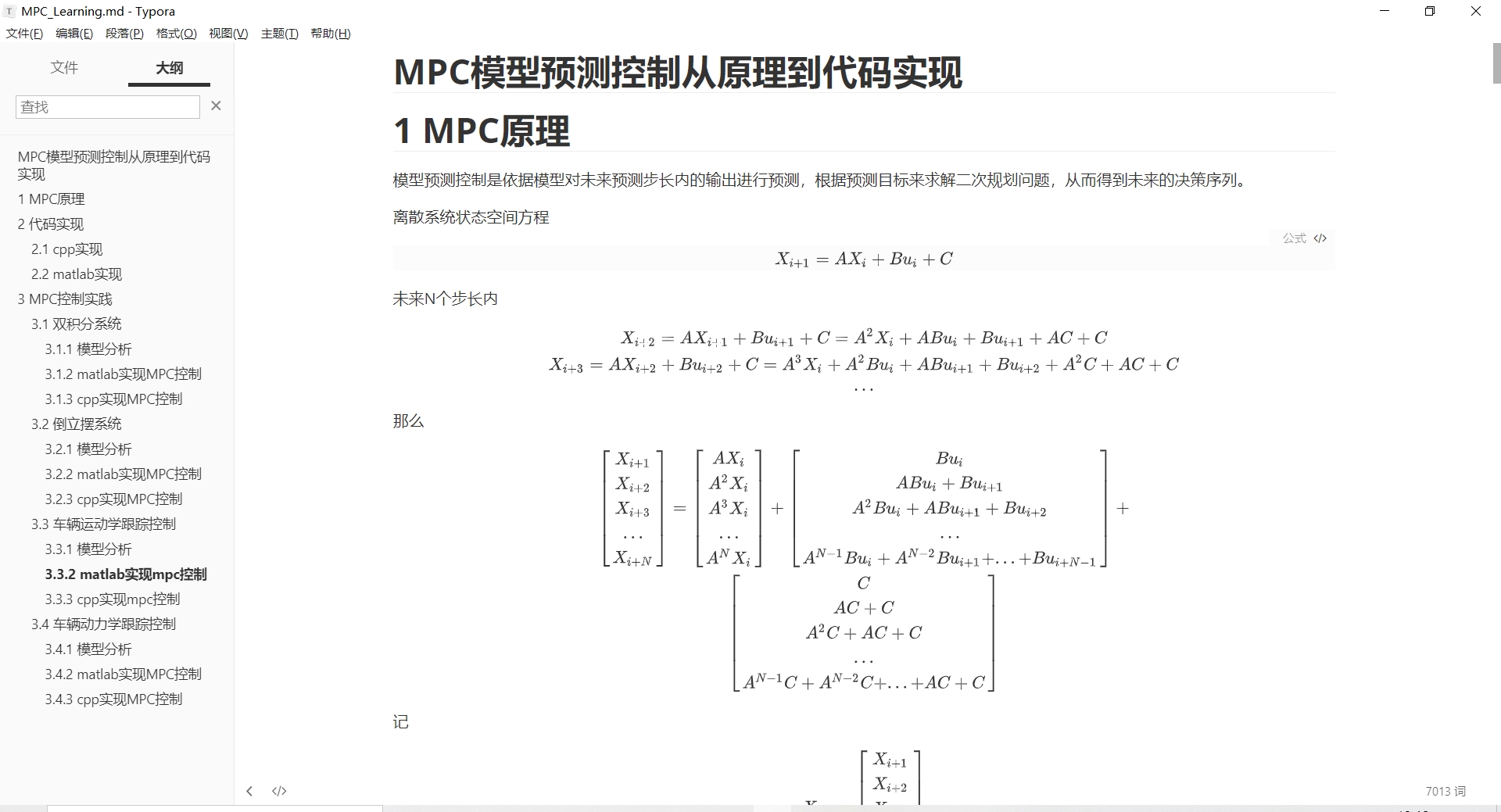
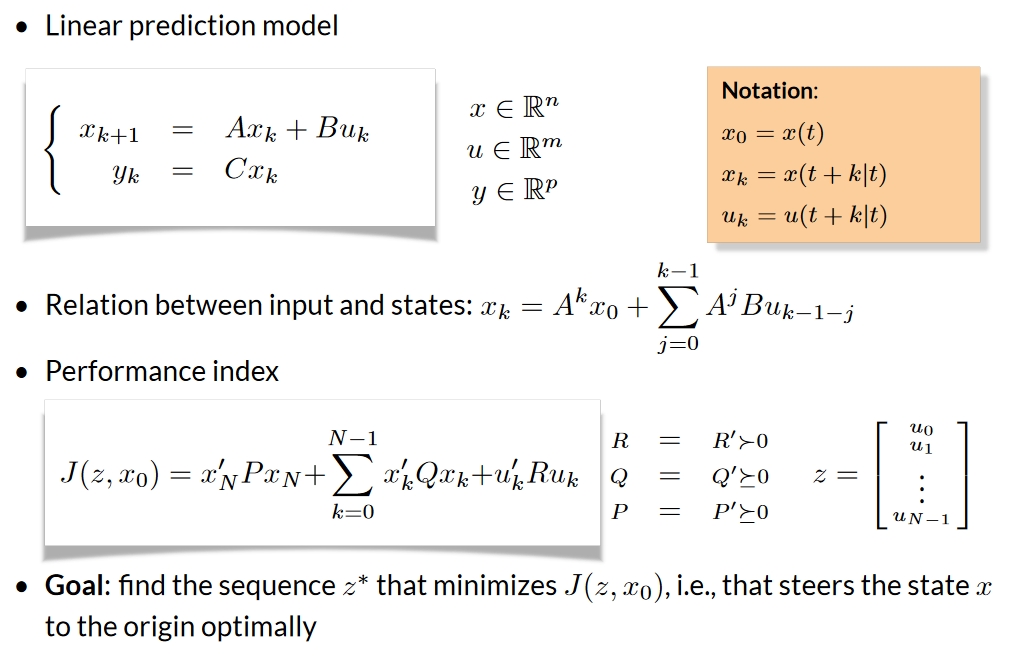
模型预测控制(Model Predictive Control, MPC)是一种先进的控制策略,它通过求解有限时域内的最优控制问题来实现系统的控制目标。本文基于MATLAB实现的多个MPC案例,分析其在不同控制系统中的应用与实现原理。
1. MPC基础理论与实现框架
1.1 MPC核心算法
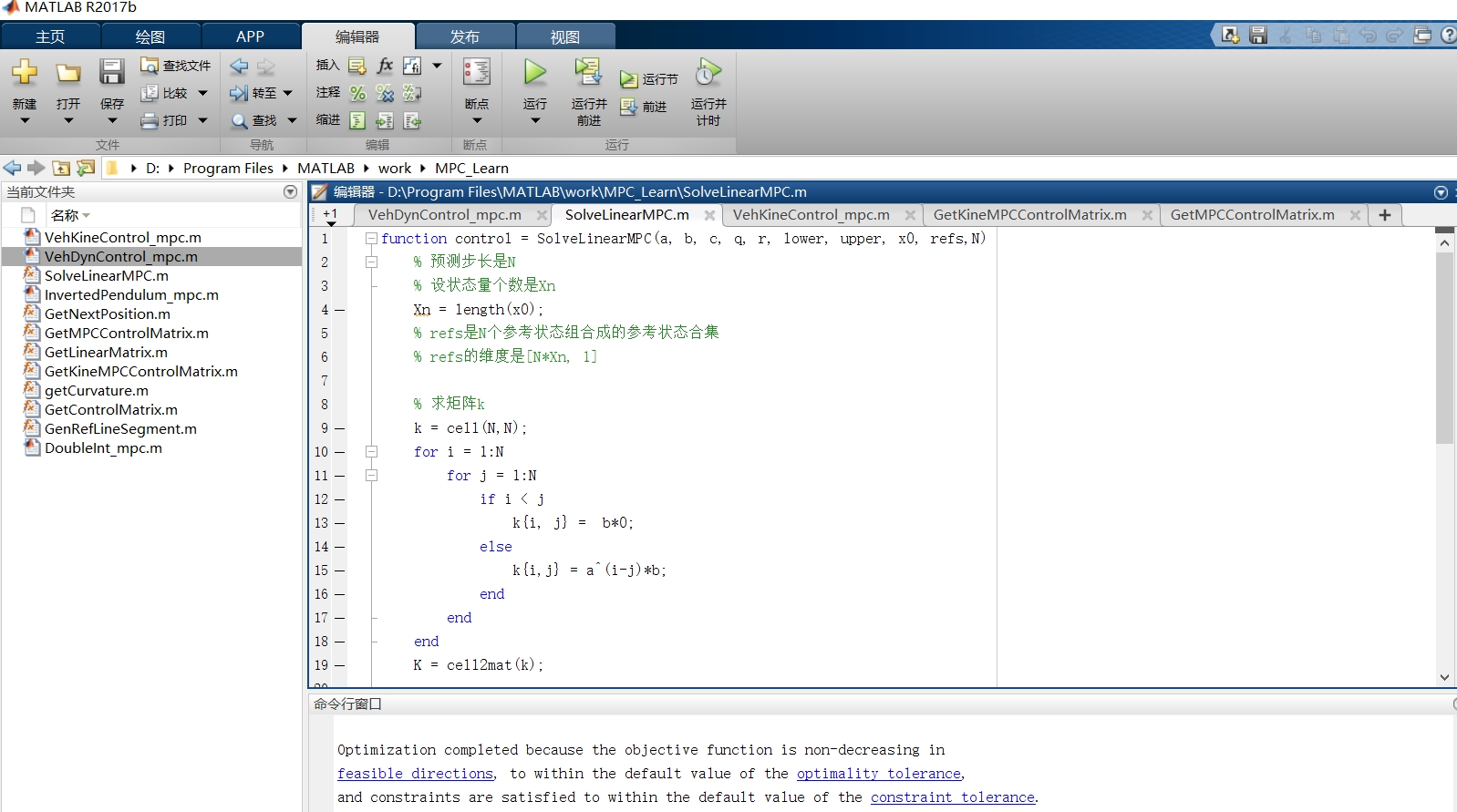
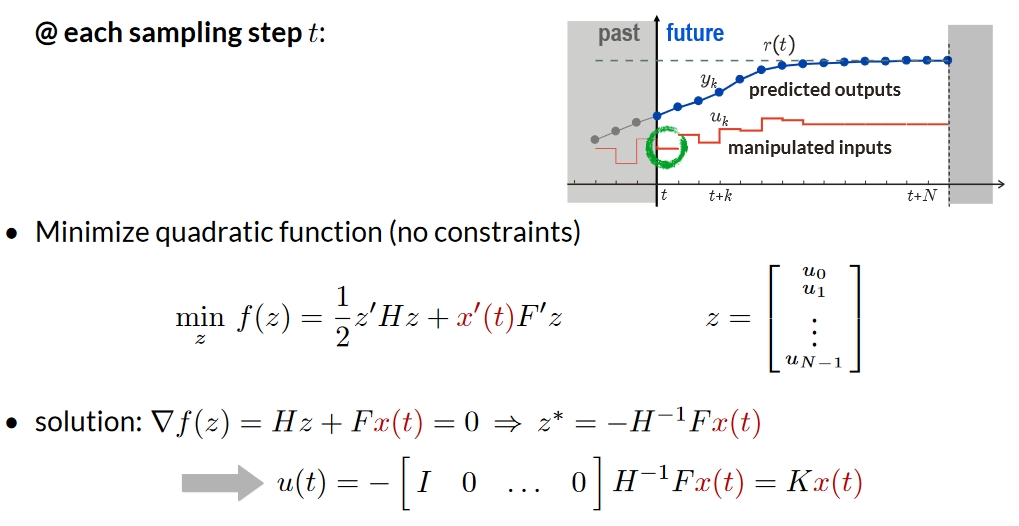
MPC的核心思想是在每个采样时刻,基于当前系统状态和预测模型,求解未来有限时域内的最优控制序列,但只实施第一个控制量。在SolveLinearMPC.m中实现了这一核心算法:
function control = SolveLinearMPC(a, b, c, q, r, lower, upper, x0, refs, N)
% 构建预测矩阵K和M
k = cell(N,N);
for i = 1:N
for j = 1:N
if i < j
k{i, j} = b*0;
else
k{i,j} = a^(i-j)*b;
end
end
end
K = cell2mat(k);
% 构建约束并求解二次规划问题
M1 = (K.')*Q*K+R;
M2 = (K.')*Q*(M-refs);
[control,~,~,~,~] = quadprog(M1,M2,[],[],[],[],ll, uu);
end该函数通过构建预测矩阵,将MPC问题转化为带约束的二次规划问题,利用MATLAB的quadprog求解器进行求解。
1.2 系统建模与离散化
MPC的性能很大程度上依赖于系统模型的准确性。在提供的代码中,包含了多种系统建模方法:
- 双积分系统:在
DoubleInt_mpc.m中实现,展示MPC在简单线性系统中的应用 - 倒立摆系统:在
InvertedPendulum_mpc.m中实现,演示MPC在非线性系统控制中的效果 - 车辆动力学模型:在
VehDynControlmpc.m和VehKineControlmpc.m中分别实现动力学和运动学模型
2. 车辆控制应用案例
2.1 轨迹生成与参考路径规划
GenRefLineSegment.m函数实现了智能车辆轨迹生成功能,支持直线行驶和变道场景:
function [x, y, v, phi] = GenRefLineSegment(x0, y0, v0, v1, type, dT)
switch type
case 'left'
[x,y, v, phi] = GenRoadPoint(x0, y0, v0, v1, 4.0, dT, 3);
case 'right'
[x,y, v, phi] = GenRoadPoint(x0, y0, v0, v1, -4.0, dT, 3);
otherwise
[x,y, v, phi] = GenRoadPoint(x0, y0, v0, v1, 0, dT, 3);
end
end该函数基于五次多项式(横向)和四次多项式(纵向)拟合算法,生成平滑的参考轨迹,确保车辆运动的舒适性和可行性。
2.2 车辆模型构建
代码中实现了两种车辆模型:动力学模型和运动学模型。
mpc模型预测控制从原理到代码实现 mpc模型预测控制详细原理推导 matlab和c++两种编程实现 四个实际控制工程案例: 双积分控制系统 倒立摆控制系统 车辆运动学跟踪控制系统 车辆动力学跟踪控制系统 包含上述所有的文档和代码。
动力学模型(在GetMPCControlMatrix.m中定义)考虑了轮胎力、质量分布等物理特性,状态空间包含6个状态变量:横向误差、横向误差变化率、横摆角误差、横摆角速度误差、纵向位置误差和速度误差。
运动学模型(在GetKineMPCControlMatrix.m中定义)简化了车辆动态,主要考虑位置、航向角等几何关系,适用于低速场景。
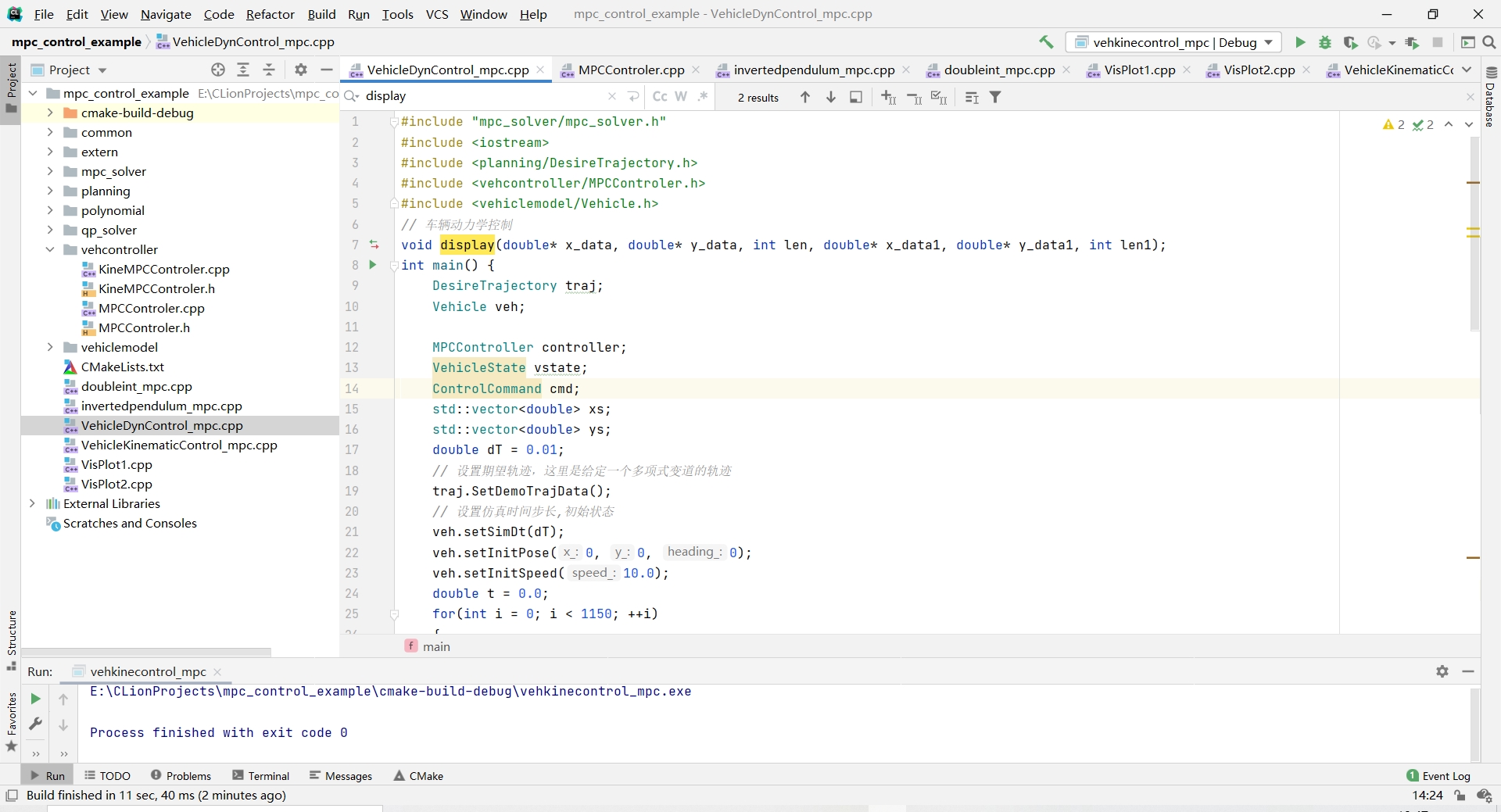
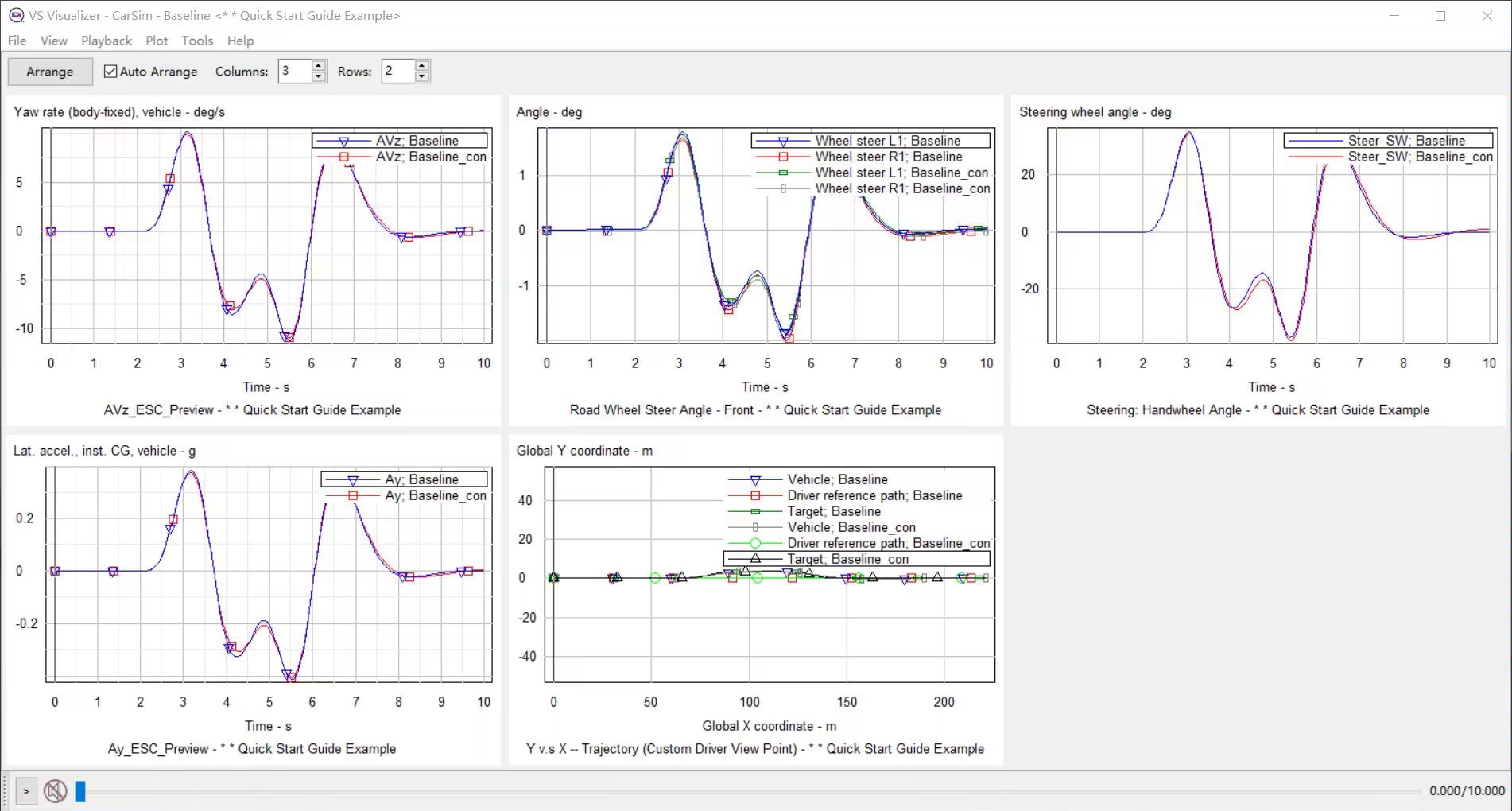
2.3 路径跟踪控制
在VehDynControl_mpc.m中实现了完整的车辆路径跟踪MPC控制器:
- 误差计算:计算横向误差、航向角误差等状态偏差
- 曲率估计:利用
getCurvature.m函数估计道路曲率 - 控制求解:基于当前状态和参考轨迹求解MPC问题
- 状态更新:通过
GetNextPosition.m更新车辆状态
3. MPC控制器设计与调参
3.1 权重矩阵设计
MPC控制器的性能很大程度上依赖于权重矩阵Q和R的选择:
- 状态权重Q:决定各状态变量的重要程度
- 控制权重R:限制控制量的变化幅度,避免过于剧烈的控制动作
在倒立摆案例中,Q矩阵赋予位置和角度较大的权重,确保系统稳定:
Q = [1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1];
R = 0.1;3.2 约束处理
MPC的一个重要优势是能够显式处理约束:
low = -100; % 控制量下限
hi = 100; % 控制量上限在实际应用中,约束可以包括执行器物理限制、安全性限制等。
4. 应用效果与分析
4.1 双积分系统控制
双积分系统作为经典的控

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献89条内容
已为社区贡献89条内容

所有评论(0)