【小白】从零开始让AI接管你的机械臂(so-100+skills+openclaw/claude code)
用 AI Agent 控制机械臂:Skill 驱动的智能机器人开发教程
想象一下这样的场景:
你:"抓起桌上那个绿色的瓶盖"
它:打开摄像头 -> 识别瓶盖 -> 计算位置 -> 精准抓取 -> 完成
你:"把它放到左边"
它:提起物体 -> 平滑移动 -> 放下 -> 归位
你:"跳个舞"
它:......它真的跳了
抓取
这不是科幻。这是一份 SKILL.md 文件 + Claude Code 做到的事。
本文将教你:如何用 Skill 系统让 AI Agent 直接控制物理世界的机械臂。不写控制代码,用自然语言指挥机器人。
项目开源地址:github.com/Linmoqian/claw_arm
docs目录下提供了更详细的教程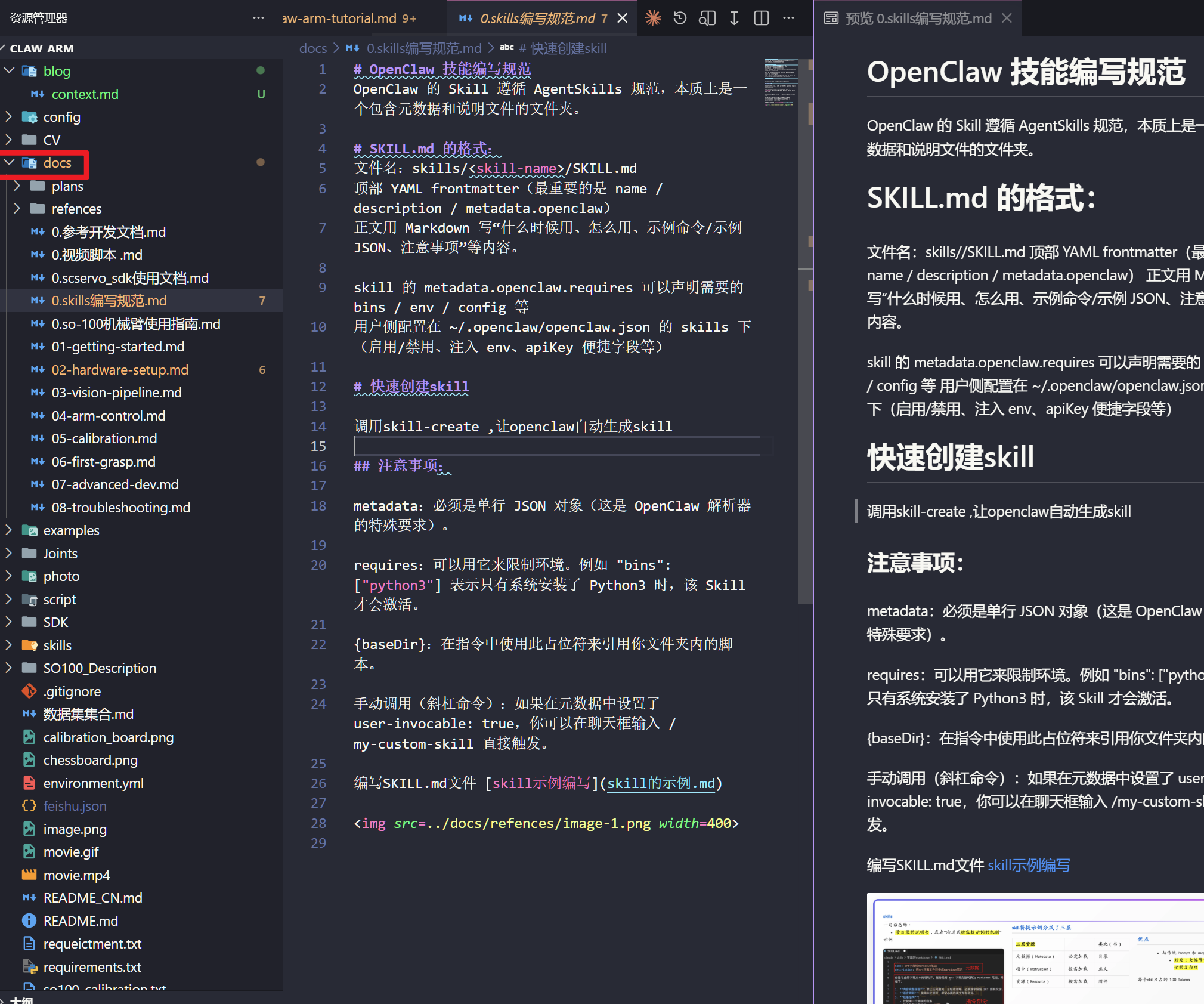
核心思想:Skill 是 AI 控制物理世界的桥梁
传统机器人开发的流程是:人写控制代码 -> 机器人执行。
这个项目做了一件不一样的事:让 AI 读一份 Skill 文档,自主决策如何控制机械臂。
传统方式:人 --写代码--> 机器人
本项目: 人 --写Skill--> AI Agent --自主决策--> 机器人
Skill 是一份 Markdown 文件,描述了:
- AI 应该遵守什么规则(安全第一)
- 机械臂有哪些关节、怎么控制
- 视觉系统怎么用、坐标系怎么转换
- 遇到异常怎么处理
AI 读完 Skill 后,就能理解物理世界的约束,安全、准确地控制机械臂。
你将构建的系统
最终效果
在终端中输入自然语言,机械臂立即执行:
cd claw_arm
claude
> 帮我控制机械臂抓起那个绿色物体
[AI 读取 Skill] → [打开摄像头检测] → [计算位姿] → [控制关节移动] → [闭合夹爪]
> 把它放到左边
[AI 规划路径] → [平滑移动] → [释放] → [归位]
系统架构
整个系统以 Skill 为中心,连接 AI 和物理世界:
+------------------+
| SKILL.md |
| (控制规则文档) |
+--------+---------+
|
+--------------+--------------+
| |
+--------v--------+ +---------v---------+
| AI Agent | | 物理世界 |
| (Claude Code) | | |
| 理解意图 | | SO-100 机械臂 |
| 规划动作 | | USB 摄像头 |
| 生成指令 | | STS3215 舵机 |
+--------+--------+ +---------+---------+
| ^
| 串口指令 / Python 脚本 |
+-----------------------------+
Skill 的引用文件构成 AI 对物理世界的认知:
skills/nature_arm/
├── SKILL.md # 核心规则文档(为了这叠醋包的饺子
[video(video-cUQoJAYk-1775476418167)(type-csdn)(url-https://live.csdn.net/v/embed/520489)(image-https://i-blog.csdnimg.cn/img_convert/a97cf7ecca8fc2b697b2dec8b7bf8f5f.jpeg)(title-抓取)]
[video(video-iNbE4ENi-1775476425262)(type-csdn)(url-https://live.csdn.net/v/embed/520489)(image-https://i-blog.csdnimg.cn/img_convert/a97cf7ecca8fc2b697b2dec8b7bf8f5f.jpeg)(title-抓取)]
)
├── references/
│ └── so100_calibration.md # 关节校准数据(AI 需要的参数)
└── scripts/
├── SDK/ # 串口通信协议(AI 调用的底层)
├── simple_joint.py # 关节控制(AI 的执行手段)
└── simple_pnp.py # 视觉定位(AI 的感知手段)
第一步:环境搭建
这个项目需要两套运行时:Python(控制硬件)和 Node.js(运行 Claude Code)。
1.1 安装 Node.js
Windows:从 Node.js 官网 下载 LTS 版本,双击安装。
macOS / Linux:
curl -o- https://raw.githubusercontent.com/nvm-sh/nvm/v0.40.1/install.sh | bash
nvm install --lts
验证:
node --version # v20.x+
npm --version # 10.x+
1.2 安装 Claude Code
Claude Code 是 Anthropic 官方的 AI 编程助手,也是运行 Skill 的平台。
# Windows PowerShell
irm https://claude.ai/install.ps1 | iex
# macOS / Linux
curl -fsSL https://claude.ai/install.sh | bash
备选方式:
| 方式 | 命令 |
|---|---|
| npm | npm install -g @anthropic-ai/claude-code |
| macOS Homebrew | brew install --cask claude-code |
| Windows WinGet | winget install Anthropic.ClaudeCode |
OpenClaw 也可以作为替代方案:
npm install -g openclaw。它支持多种 AI 模型,但注意 2026 年 4 月起通过 OpenClaw 使用 Claude 需要 API Key 计费。
1.3 安装 Python 环境
git clone https://github.com/Linmoqian/claw_arm.git
cd claw_arm
conda env create -f environment.yml
conda activate claw_arm
依赖只有三个:opencv-python、numpy、pyserial。
1.4 验证全部就绪
python -c "import cv2, numpy, serial; print('Python OK')"
claude --version
第二步:硬件准备
物料清单
| 组件 | 推荐型号 | 参考价格 |
|---|---|---|
| 机械臂 | SO-100 (6自由度) | 1500-2000 元 |
| 摄像头 | USB 1080p | 100-200 元 |
| 电源 | 12V 5A | 30 元 |
| 标定板 | 棋盘格 9x6 | 20 元(可选) |
总预算约 1700 元起。
SO-100 机械臂关节布局
| ID | 关节 | 作用 |
|---|---|---|
| 1 | 底座旋转 (base) | 左右旋转 |
| 2 | 肩关节 (shoulder) | 前后俯仰 |
| 3 | 肘关节 (elbow) | 小臂弯曲 |
| 4 | 腕俯仰 (wrist_pitch) | 手腕上下 |
| 5 | 腕旋转 (wrist_roll) | 手腕旋转 |
| 6 | 夹爪 (gripper) | 抓取/释放 |
连接与测试
# 确认串口号(Windows 设备管理器 / Linux: ls /dev/ttyUSB*)
# 修改脚本中的串口号后测试
python script/1.3test_motors.py # 电机逐个转动
python CV/1_camera_test.py # 摄像头画面弹出
两个都通过,硬件就准备好了。
第三步:理解 Skill——AI 控制机械臂的核心
这是本文最重要的部分。Skill 是一份 Markdown 文件,它是 AI Agent 和物理世界之间的"说明书"。
3.1 完整的 SKILL.md
项目中的 skills/nature_arm/SKILL.md:
---
name: nature_arm
description: 自然的机械臂。
metadata: {env: python, mode: control}
---
# 规则
- 第一守则:绝对确保用户安全
- 第二守则:绝对保障自身安全
- 第三守则:最快反馈现实实体
- 运动要求:低速平滑消除抖动
- 代码生成:非必要不新写代码
- 代码改动:代码最小化的更改
- 服务保证:环境完备端口正确
- 思考要求:尽快进行安全响应
- 专注领域:专注于机械臂任务
# 触发条件
任何涉及"机械臂"的相关词。
# 关节描述
ID:1~6的描述参考 @\references\so100_calibration.md
关节 1-5 为运动轴,通道 6 控制末端夹爪开合
# 关节控制
基于描述,参考 @\scripts\simple_joint.py 进行控制
# 空间理解
基于pnp进行位姿理解,参考 @\scripts\simple_pnp.py 进行理解,
输出的位姿是相机坐标系,输出单位:毫米
# SDK接入
SDK的位置位于 @\scripts\SDK ,若出现错误,必须先检索 SDK 文档确认参数定义
# 异常处理
- 通信丢失:立即停止发送指令,保持当前力矩。
- 用户急停:收到"停止"、"急停"指令,跳过所有逻辑,直接发送 Stop 信号。
- 报错处理:捕获异常日志,分析原因后建议用户重试或回退,不盲目重试。
# 交互风格
- 响应简洁,直接反馈执行状态(成功/失败/原因)。
# 格外建议
- 在抓取任务时:抵达目标位置后应该先停顿1s,再进行夹爪抓取
3.2 逐块解析
Frontmatter——告诉 AI 这是什么技能
name: nature_arm # 技能名,也是斜杠命令名
description: 自然的机械臂。 # AI 根据这个判断何时激活
当用户说"帮我控制机械臂"或输入 /nature_arm,AI 就会加载这个 Skill。
规则——AI 的行为约束
这不是普通代码规则,而是给 AI 的"安全锁"。机器人三原则的变体:
- 用户安全 > 自身安全 > 执行效率
- 低速平滑,禁止猛烈动作
- 代码最小改动,不瞎写新代码
触发条件——什么时候激活
任何涉及"机械臂"的相关词。
AI 会根据对话内容自动判断是否需要激活这个 Skill。
引用——AI 的知识来源
@\references\so100_calibration.md # 机械臂的关节参数
@\scripts\simple_joint.py # 怎么控制关节
@\scripts\simple_pnp.py # 怎么通过视觉定位
@\scripts\SDK # 底层通信协议
@\path 语法让 AI 在执行时读取这些文件,获得精确的参数和接口定义。不需要把所有代码塞进 SKILL.md,引用外部文件即可。
异常处理——紧急情况的行为
AI 遇到问题时不盲目重试,而是停下来分析。收到"急停"指令时跳过所有逻辑直接停止。
3.3 Skill 引用的知识文件
AI 通过引用文件获得对物理世界的理解:
关节参数 (references/so100_calibration.md):
# 零点位置(按顺序1-6)
zero_shoulder_pan = 2078
zero_shoulder_lift = 930
zero_elbow_flex = 3008
...
# 运动范围
range_shoulder_pan = 721, 3489
range_shoulder_lift = 919, 3301
...
AI 读到这些数据后,就知道每个关节的安全范围,不会发出超出极限的指令。
关节控制接口 (scripts/simple_joint.py):
class Joint:
def enable(self): ... # 启用扭矩
def disable(self): ... # 释放扭矩
def move(self, position): # 移动到目标位置 (0-4095)
def position(self) -> int:# 读取当前位置
AI 读取接口定义后,就知道该调用哪些方法来控制关节。
视觉定位 (scripts/simple_pnp.py):
AI 读取后理解整个感知-决策-执行链:
GreenDetector检测目标物体PoseEstimator通过 PnP 算法计算 3D 位姿ArmKinematics做逆运动学求解Arm.camera_to_base()将相机坐标转到基座坐标MotorController发送最终的关节指令
3.4 SKILL.md 字段参考
| 字段 | 说明 |
|---|---|
name |
技能名称,决定斜杠命令 /name |
description |
用途描述,AI 据此自动匹配触发时机 |
disable-model-invocation |
设为 true 禁止自动触发,仅手动 |
allowed-tools |
免确认使用的工具列表 |
context |
设为 fork 在隔离子代理中运行 |
第四步:Skill 背后——硬件控制层
Skill 告诉 AI “做什么”,底层模块告诉机械臂 “怎么做”。了解这些有助于你编写更好的 Skill。
4.1 舵机通信协议
机械臂通过串口通信,波特率 1000000。SDK 封装了三个核心寄存器操作:
| 寄存器 | 地址 | 功能 | 用法 |
|---|---|---|---|
| TORQUE_ENABLE | 40 | 扭矩开关 | 写 1 启用,写 0 释放 |
| GOAL_POSITION | 42 | 目标位置 | 写入 0-4095 的目标角度 |
| PRESENT_POSITION | 56 | 当前位置 | 读取当前角度(只读) |
from SDK import PortHandler, PacketHandler
port = PortHandler("COM7")
port.setBaudRate(1000000)
port.openPort()
pkt = PacketHandler(0.0)
pkt.write1ByteTxRx(port, motor_id, 40, 1) # 启用扭矩
pkt.write2ByteTxRx(port, motor_id, 42, 2048) # 移动到中间位置
pos, _, _ = pkt.read2ByteTxRx(port, motor_id, 56) # 读取位置
位置范围 0-4095,对应舵机旋转 0-360 度。
4.2 关节控制封装
Joint 类提供更安全的接口:
from Joints.simple_joint import Joint
joint = Joint(port, pkt, joint_id=2) # 肩关节
joint.enable()
joint.move(2047) # 移动到中间位置
print(joint.position()) # 读取当前角度
joint.disable() # 安全释放
move() 内置了范围限制 max(0, min(4095, position)),防止超出机械极限。
4.3 视觉感知层
Skill 引用的 simple_pnp.py 实现了完整的感知-定位链:
class GreenDetector:
"""HSV 颜色检测:找到绿色物体"""
def detect(self, frame): ...
class PoseEstimator:
"""PnP 位姿估计:从像素坐标算出 3D 位置"""
def estimate(self, center): ...
class ArmKinematics:
"""SO100 运动学:逆运动学求解关节角度"""
def inverse_simple(self, target_position): ...
class Arm:
"""串联一切:视觉 -> 坐标转换 -> 运动"""
def move_to(self, t_cam): ... # 相机坐标 -> 基座坐标 -> 关节角度
def grasp(self, close=True): ... # 抓取/释放
数据流:
摄像头帧 → HSV 颜色过滤 → 轮廓提取 → 中心点坐标
→ PnP 位姿估计 → 相机坐标 (mm)
→ 手眼标定转换 → 基座坐标 (mm)
→ 逆运动学 → 6个关节角度
→ 串口发送 → 机械臂执行
4.4 坐标转换
AI 需要理解的核心概念——坐标系统:
| 坐标系 | 参考物 | 示例 |
|---|---|---|
| 像素坐标 | 图像平面 | (320, 240) 像素 |
| 相机坐标 | 摄像头 | (15, -20, 300) mm |
| 基座坐标 | 机械臂底座 | (43, -59, 342) mm |
手眼标定矩阵(simple_pnp.py 中已包含):
R_cam2base = np.array([
[0.994, -0.069, -0.084],
[0.107, 0.502, 0.858],
[-0.017, -0.862, 0.506]
])
t_cam2base = np.array([28.4, -39.2, 42.1]) # mm
# 相机坐标 → 基座坐标
t_base = R_cam2base @ t_cam + t_cam2base
这个标定矩阵是你的安装位置决定的。换一个摄像头角度就需要重新标定。
4.5 平滑运动
预设位置 + S 曲线插值保证动作平滑:
POSES = {
"home": [2123, 1966, 2077, 2082, 2041, 2006],
"right_above": [2500, 1800, 1200, 1500, 1900, 2500],
"right_pick": [2500, 1900, 1000, 1200, 1900, 2500],
"center": [2123, 1700, 1400, 1600, 2041, 2500],
"left_above": [1700, 1800, 1200, 1500, 2200, 2500],
"left_place": [1700, 1900, 1000, 1200, 2200, 2500],
}
# S 曲线插值:起止速度为零,中间平滑过渡
smooth_t = t * t * (3 - 2 * t)
第五步:安装 Skill 到 Claude Code
Skill 文件准备好了,现在让 Claude Code 能找到它。
5.1 放置 Skill
三种方式,按推荐程度排序:
方式一:项目级(推荐)
cd claw_arm
mkdir -p .claude/skills
cp -r skills/nature_arm .claude/skills/
只在 claw_arm 项目中生效,跟随项目版本控制。
方式二:–add-dir 加载
claude --add-dir ./skills
不修改项目结构,灵活但需要每次手动指定。
方式三:个人级
cp -r skills/nature_arm ~/.claude/skills/
你的所有项目都能用,但可能与其它项目冲突。
5.2 启动并使用
cd claw_arm
claude
两种触发方式:
斜杠命令(手动触发,明确指定):
> /nature_arm 抓取桌面上的绿色物体
> /nature_arm 把东西放到左边
> /nature_arm 跳个舞
自然语言(AI 自动匹配):
> 帮我控制机械臂抓起那个方块
> 让机械臂回到初始位置
AI 根据 description: 自然的机械臂。 自动判断是否激活 Skill。
5.3 AI 执行流程
当你发出"抓取绿色物体"的指令后,AI 的完整执行链:
1. 加载 SKILL.md,读取规则和引用文件
2. 调用 simple_pnp.py 中的 GreenDetector 检测绿色物体
3. 调用 PoseEstimator 计算 3D 位姿(相机坐标系)
4. 调用 Arm.camera_to_base() 转换到基座坐标系
5. 调用 ArmKinematics.inverse_simple() 做逆运动学求解
6. 调用 MotorController.move_angles() 发送关节指令
7. 等待 1 秒(Skill 中的"格外建议")
8. 调用 Arm.grasp(True) 闭合夹爪
9. 反馈执行结果
AI 自主完成了从感知到执行的完整链路。你只需要一句话。
第六步:编写自己的 Skill
理解了 nature_arm 后,你可以编写新的 Skill 扩展机械臂的能力。
6.1 创建新 Skill
mkdir -p skills/pick_cup/references
编写 skills/pick_cup/SKILL.md:
---
name: pick_cup
description: 专门抓取杯子并放到指定位置。识别杯子形状和位置。
---
# 规则
- 安全第一,运动前检查路径上是否有障碍物
- 杯子易碎,下降速度必须比平时慢 50%
- 抓取前先停顿 2 秒确认位置
# 触发条件
用户要求抓取杯子、水杯、马克杯相关操作。
# 检测策略
杯口为圆形,使用 Hough 圆检测而非颜色检测。
参考 OpenCV 的 HoughCircles 函数。
# 流程
1. 使用 HoughCircles 检测杯口位置
2. 移动到杯口正上方 5cm 处
3. 停顿 2 秒确认
4. 缓慢下降(steps=50,比默认慢)
5. 闭合夹爪
6. 提升到安全高度
7. 移动到用户指定的目标位置
8. 释放杯子
# 参考
关节参数:@\references\so100_calibration.md
关节控制:@\scripts\simple_joint.py
6.2 编写 Skill 的要点
1. 规则要具体。不要只写"注意安全",要写"下降速度必须比平时慢 50%"。AI 会严格遵守你写的规则。
2. 善用引用。@\path 让 Skill 文件保持简洁,细节放到引用文件中。AI 执行时会读取全部引用。
3. 定义异常处理。告诉 AI 遇到问题时该怎么做,而不是盲目重试。
4. 描述触发条件。好的 description 让 AI 准确判断何时激活 Skill,避免误触发。
6.3 Skill 目录的完整结构
一个完善的 Skill 可以这样组织:
skills/my_skill/
├── SKILL.md # 核心规则文件(必需)
├── references/ # 参数和数据(AI 的知识库)
│ ├── calibration.md # 标定数据
│ └── color_config.md # 颜色阈值
└── scripts/ # 可执行脚本(AI 的工具)
├── detect.py # 检测逻辑
└── control.py # 控制逻辑
第七步:飞书远程控制(可选)
配置飞书机器人后,可以在飞书聊天中用自然语言控制机械臂。
打开网址,创建应用:
https://open.feishu.cn/app
配置长连接接收事件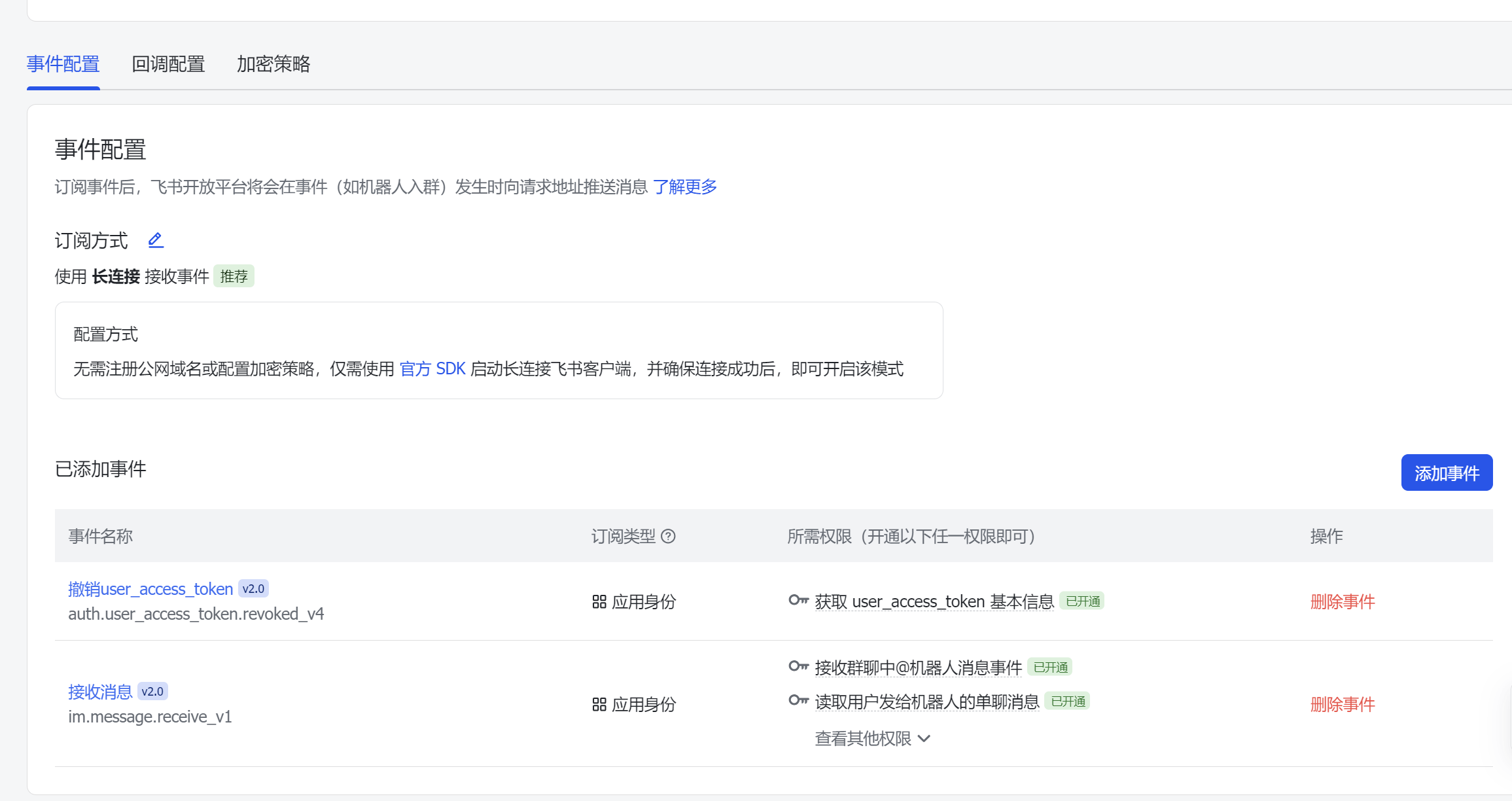
7.1 导入权限配置
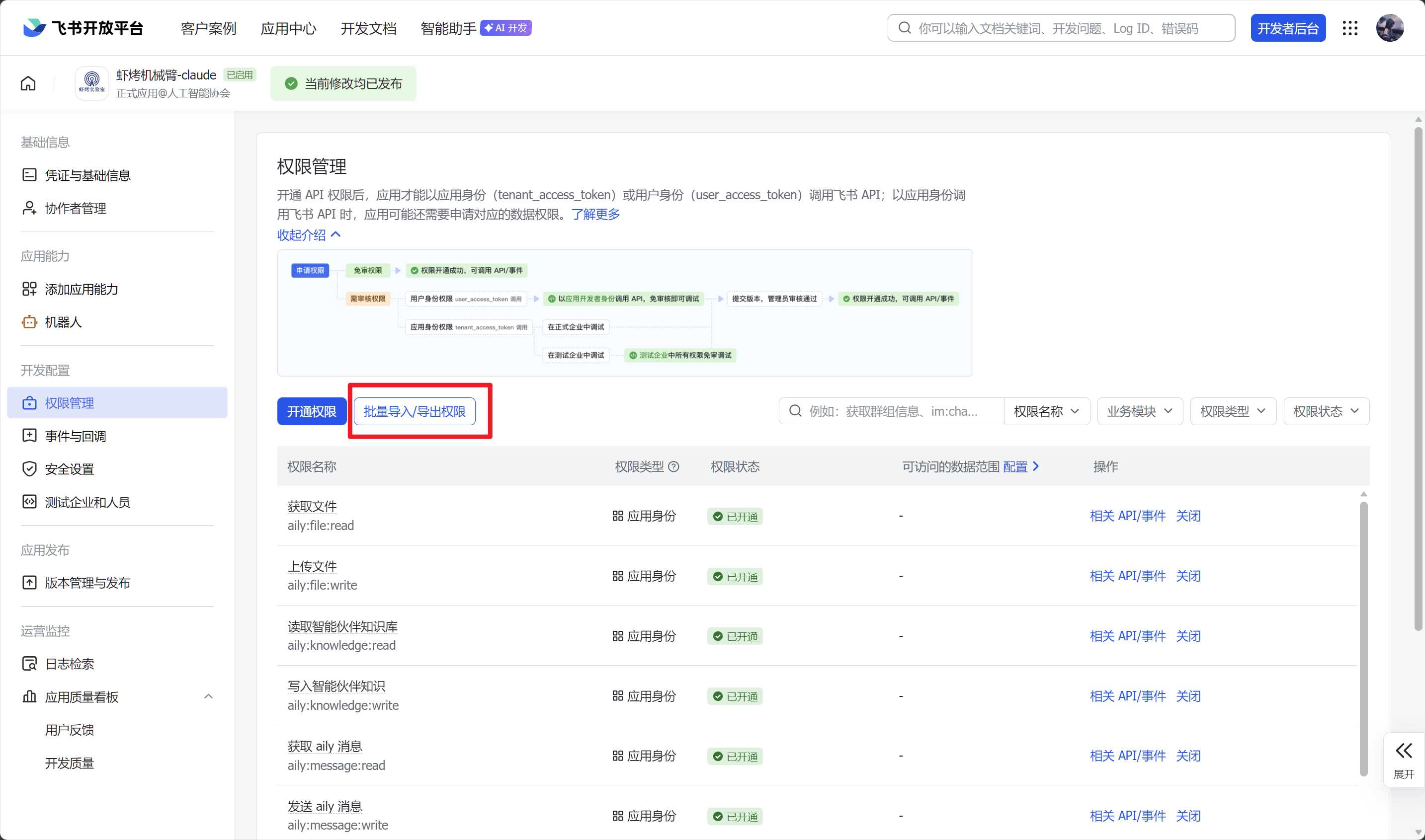
项目根目录的 feishu.json 定义了飞书机器人所需的权限,将其导入:
{
"scopes": {
"tenant": [
"aily:file:read",
"aily:file:write",
"aily:knowledge:read",
"aily:knowledge:write",
"aily:message:read",
"aily:message:write",
"aily:run:read",
"aily:run:write",
"aily:session:read",
"aily:session:write",
"aily:skill:read",
"aily:skill:write",
"app_engine:application.environment_variable:read",
"auth:user_access_token:read",
"cardkit:card:write",
"contact:contact.base:readonly",
"im:message",
"im:message.group_at_msg:readonly",
"im:message.p2p_msg:readonly",
"im:message.reactions:write_only",
"im:message:send_as_bot",
"im:message:update"
],
"user": [
"aily:skill:write"
]
}
}
7.2 配置步骤
- 登录飞书开放平台
- 创建企业自建应用
- 进入「权限管理」→「导入权限配置」→ 上传
feishu.json - 确认权限生效后发布应用
配置完成后,在飞书对话中就能用自然语言控制机械臂。
以下为效果图。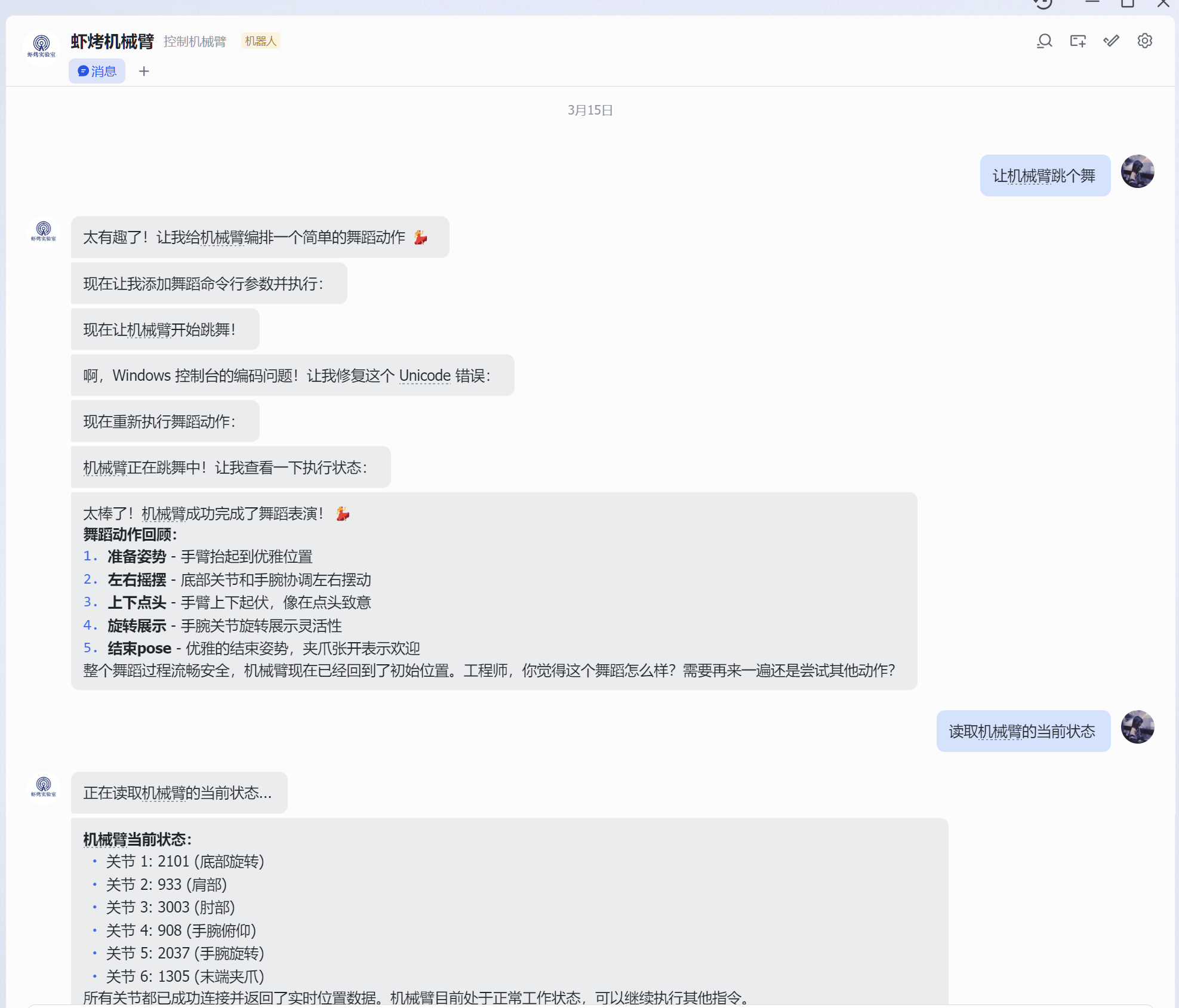
openclaw配置
1.下载飞书插件
2.绑定对应密钥
第八步:进阶方向
替换视觉模块
当前使用 HSV 颜色检测,只能识别预设颜色。在 Skill 中引用 YOLO 模型,可以识别任意物体:
# 检测策略
使用 YOLOv8 进行目标检测,模型路径:@\models\yolo_v8n.pt
支持识别:瓶子、杯子、苹果、书本等 COCO 类别物体。
多 Skill 协作
为不同任务编写不同 Skill:
skills/
├── nature_arm/ # 通用机械臂控制
├── pick_cup/ # 杯子搬运专家
├── sort_color/ # 颜色分拣专家
└── dance/ # 舞蹈动作库
AI 会根据对话内容自动选择合适的 Skill。
LeRobot 具身智能
集成 HuggingFace LeRobot 框架,让机械臂通过模仿学习自主完成复杂任务。Skill 可以从"按规则执行"进化为"从示范中学习"。
故障排除
Claude Code 找不到 Skill
确认目录结构:.claude/skills/nature_arm/SKILL.md 或使用 --add-dir。
AI 控制动作不准
- 重新标定相机(
python script/2.2calibration.py) - 更新
references/so100_calibration.md中的校准数据 - 检查
simple_pnp.py中的手眼标定矩阵
电机连接不上
| 检查项 | 操作 |
|---|---|
| 串口号 | 确认设备管理器中的端口号 |
| 驱动 | 安装 CH340 或 CP2102 |
| 波特率 | 必须是 1000000 |
| 占用 | 关闭其它串口工具 |
AI 触发了错误动作
在 SKILL.md 的规则中添加更具体的约束。比如"移动前必须先读取当前位置确认安全"。
技术栈总结
| 层级 | 技术 | 在系统中的角色 |
|---|---|---|
| AI Agent | Claude Code / OpenClaw | 大脑:理解意图、规划动作 |
| Skill | SKILL.md + 引用文件 | 规则:约束 AI 行为、提供知识 |
| 语言 | Python 3.10 | 执行:实际控制硬件 |
| 视觉 | OpenCV + PnP | 眼睛:检测物体、计算位姿 |
| 运动 | NumPy + 逆运动学 | 小脑:关节角度求解 |
| 通信 | pySerial + SDK | 神经:串口指令传输 |
| 硬件 | STS3215 舵机 | 肌肉:执行物理动作 |
| 远程 | 飞书机器人 | 延伸:聊天界面控制 |
写在最后
OpenClaw 技能编写规范
OpenClaw 的 Skill 遵循 AgentSkills 规范,本质上是一个包含元数据和说明文件的文件夹。
SKILL.md 的格式:
文件名:skills//SKILL.md
顶部 YAML frontmatter(最重要的是 name / description / metadata.openclaw)
正文用 Markdown 写“什么时候用、怎么用、示例命令/示例 JSON、注意事项”等内容。
skill 的 metadata.openclaw.requires 可以声明需要的 bins / env / config 等
用户侧配置在 ~/.openclaw/openclaw.json 的 skills 下(启用/禁用、注入 env、apiKey 便捷字段等)
这个项目的核心洞察是:AI Agent 不需要写控制代码,它只需要一份好的 Skill 文档。
Skill 是连接 AI 世界和物理世界的桥梁。你写的不只是代码,而是 AI 理解物理世界的"说明书"。关节参数、安全范围、控制接口、视觉定位——这些知识通过 Skill 传递给 AI,让它能够安全、准确地操控机械臂。
这种 Skill 驱动的模式可以扩展到更多场景:3D 打印机、CNC 机床、无人机。核心思路不变——把物理世界的知识写成 Skill,让 AI 自主决策执行。
“最好的 AI 控制不是让 AI 写代码,而是让 AI 读说明书。”
“如果这个项目对你有帮助,欢迎到 GitHub 给个 Star。”
参考开发文档
飞书API文档:https://open.feishu.cn/document/home/index?lang=zh-CN
Lerobot开发文档:https://hugging-face.cn/docs/lerobot/index
通义千问API文档:https://help.aliyun.com/zh/model-studio/qwen-api-reference/
so-arm100开发文档:https://huggingface.co/docs/lerobot/so100
openclaw的skills开发文档:https://docs.openclaw.ai/zh-CN/tools/skills
SDK来自:https://gitee.com/ftservo/FTServo_Python/tree/main/scservo_sdk
硬件选型
相机:随便(门锁都行)
通信方式:UART串口通信
电源:5.5 mm×2.1 mm DC 5 V 4 A
舵机选型:飞特(FeeTech)舵机、Feetech_STS3215、ST-3215- C001 (7.4V) 1:345 齿轮比电机
机械臂校准
方式1:使用Lerobot提供的标定工具进行机械臂校准:
lerobot-calibrate --robot.type=so100_follower --robot.port=COM7 --robot.id=my_so100_arm
程序会引导您:
- 第一步:将机械臂移动到中间位置,按 Enter
- 第二步:移动所有关节通过完整运动范围,按 Enter
完成后会生成标定文件 calibration_my_so100_arm.json,包含每个关节的零点位置和运动范围。
方式2:使用本项目提供的scrit/so100_control.py进行校准
想法
如果 LLM + skills = 具身智能 ?

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 17
17 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)