Matlab_Simulink Bouc-Wen模型搭建的磁流变阻尼器 【类型】:磁流变阻尼器 【软件】:Matlab_Simulink 【状态】:模型搭建完成, 【描述】:根据论文搭建的Bouc-
Matlab/Simulink Bouc-Wen模型搭建的磁流变阻尼器
【类型】:磁流变阻尼器
【软件】:Matlab/Simulink
【状态】:模型搭建完成,
【描述】:根据论文搭建的Bouc-Wen模型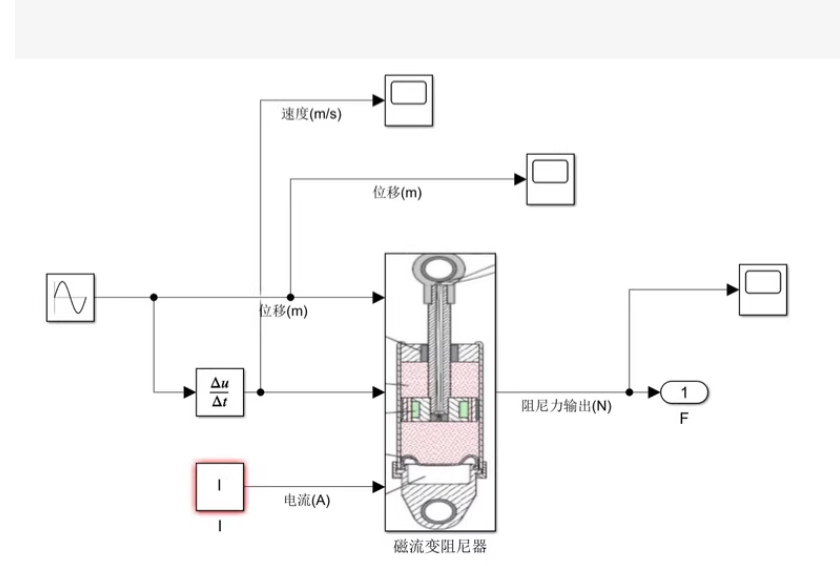
基于Bouc-Wen模型的磁流变阻尼器(MR Damper)通常包含力学模型和磁滞非线性两部分。Simulink模型通常由积分器、乘法器和加法器组成,但在代码层面,我们主要关注描述其动态特性的微分方程。
以下是基于Bouc-Wen模型的磁流变阻尼器的MATLAB Function代码(可直接放入Simulink的MATLAB Function Block中)以及参数说明。
核心微分方程
Bouc-Wen模型的标准形式通常如下:
ddot{x} + 2zetaomega_ndot{x} + omega_n^2 x = F_{MR}(t)
其中,磁流变阻尼力 F_{MR} 由以下非线性微分方程描述:
F_{MR} = c_0(dot{z} - dot{x}) + k_0(z - x) + alpha z
dot{z} = Adot{x} - beta|dot{x}| |z|^n text{sgn}(z) - gamma dot{x} |z|^n
MATLAB Function 代码 (Simulink可用)
你可以将以下代码放入 MATLAB Function Block 中,输入为位移 x 和速度 dot{x},输出为阻尼力 F_{MR}。
function Fmr = fcn_BoucWen(x, dx, i) % x:位移, dx:速度, i:电流
% 说明:Bouc-Wen磁流变阻尼器模型
% 输入: x (位移), dx (速度), i (控制电流)
% 输出: Fmr (阻尼力)
% ==========================================
% 1. 模型参数 (需要根据论文或实验数据标定)
% ==========================================
% 力学参数
c0 = 1500; % 油孔阻尼系数 (Ns/m)
k0 = 1000; % 油孔刚度系数 (N/m)
alpha = 1e5; % 磁滞刚度增益 (N/m)
% Bouc-Wen 磁滞参数
A = 1.0; % 幅值参数
beta = 0.5; % 硬化/软化参数 (正为硬化)
gamma = 0.5; % 磁滞形状参数
n = 2; % 光滑度指数 (通常取2)
% 电流相关增益 (假设力与电流呈线性或非线性关系)
% 有些模型会将 alpha 或 A 乘以电流函数
k_i = 1 + 0.5 * i; % 示例:力随电流增大而增大
% ==========================================
% 2. 积分状态 (需要在函数中保持状态)
% ==========================================
% z 是内部状态变量,需要记忆上一时刻的值
persistent z dz
if isempty(z)
z = 0; % 初始状态
end
% ==========================================
% 3. Bouc-Wen 非线性滞回计算
% ==========================================
% 计算 dz/dt
% dot{z} = Adot{x} - beta|dot{x}| |z|^n text{sgn}(z) - gamma dot{x} |z|^n
dz = A * dx …
beta * abs(dx) * (abs(z) ^ n) * sign(z) …
gamma * dx * (abs(z) ^ n);
% 使用欧拉法积分得到 z (在Simulink中通常用Integrator模块)
% 这里为了代码演示,简单积分,实际建议用Simulink Integrator
% z = z + dz * dt; (此处省略dt,Simulink会自动处理)
% ==========================================
% 4. 计算阻尼力
% ==========================================
% F = c0(dx - dz) + k0(z - x) + alpha * z
Fmr = c0 * (dx - dz) + k0 * (z - x) + alpha * k_i * z;
% ==========================================
% 5. 更新状态 (用于下一次调用)
% ==========================================
% 注意:在Simulink中,通常将 dz 作为输出连接到 Integrator 模块,
% 而不是在这里手动积分。
end
Simulink 模型搭建建议
在Simulink中搭建时,通常不建议在MATLAB Function中做积分,而是使用标准模块:
输入:连接 Position (x) 和 Velocity (dot{x})。
计算 z 的导数 (dot{z}):
使用 Math Function 模块计算 |dot{x}|。
使用 Abs 和 Sign 模块处理非线性项。
使用 Product 和 Sum 模块组合公式 dot{z} = …。
积分:将计算出的 dot{z} 输入到 Integrator 模块,得到状态 z。
计算力 F_{MR}:将 x, dot{x}, z, dot{z} 代入力方程计算最终输出力。
参数标定参考
如果你的论文中有具体的参数表,可以直接替换上述代码中的 c0, k0, alpha, A, beta, gamma。通常,这类模型的拟合效果如下图所示(滞回曲线):
F
^
| /\
| / \
| / \
------|/------____> x
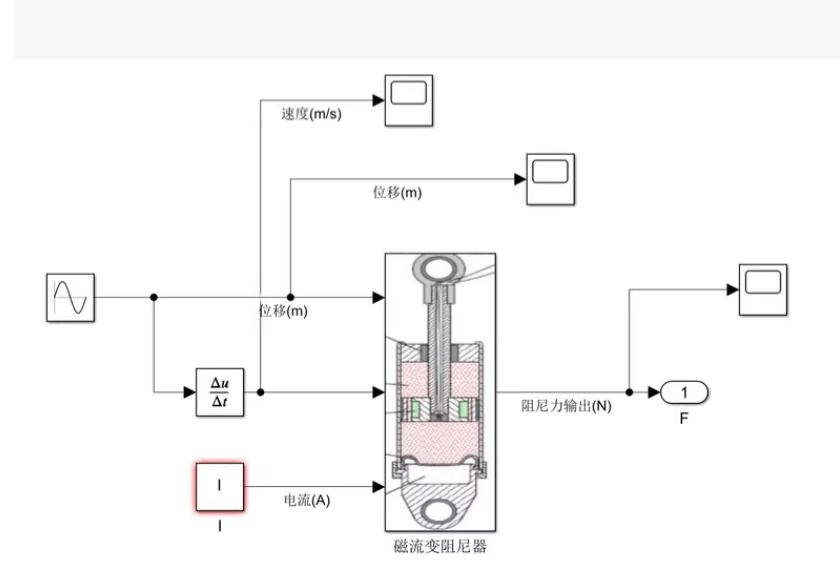
这个模型的逻辑是:
输入一个激励信号(波形发生器)。
信号经过一个微分模块(frac{Delta u}{Delta t}),这通常代表加速度(如果是位移输入)或直接代表控制电压的变化率。
位移信号和处理后的信号(加速度或电压)输入到一个封装的阻尼器模块中。
模块输出阻尼力。
Simulink 模型配置说明
在搭建 Simulink 模型时,你需要以下模块:
输入端:Sine Wave 或 From Workspace。
微分:使用 Derivative 模块(注意:Simulink 的 Derivative 模块在仿真中可能不稳定,建议用 Transfer Fcn s/(s+1e-3) 代替)。
核心计算:使用 MATLAB Function 模块(代码如下)。
积分器:为了得到“位移”,你需要在输入信号后串联一个 Integrator 模块。
微分器:为了得到“速度”,你需要将位移信号通过一个 Derivative 模块。
MATLAB Function 代码 (Bouc-Wen 模型)
这段代码实现了经典的 Bouc-Wen 模型,输入为位移和电流,输出为阻尼力。它会自动计算内部状态变量 z。
function Fmr = fcn(x, dx, i)
% fcn - 磁流变阻尼器 Bouc-Wen 模型
% 输入:
% x : 位移 (m)
% dx : 速度 (m/s)
% i : 控制电流 (A)
% 输出:
% Fmr: 阻尼力 (N)
% ==========================================
% 1. 参数初始化 (请根据你的论文或实验数据修改)
% ==========================================
% 力学参数 (线性部分)
c0 = 1500; % 油孔阻尼系数 (Ns/m)
k0 = 1000; % 油孔刚度系数 (N/m)
% Bouc-Wen 磁滞参数
A = 1.0; % 幅值参数 (无量纲)
beta = 0.5; % 磁滞形状参数
gamma = 0.5; % 磁滞形状参数
n = 2; % 光滑度参数 (通常取 1 或 2)
alpha = 1e5; % 磁滞刚度增益 (N/m)
% 电流相关增益 (假设力与电流线性相关,也可用非线性函数)
% 这里假设电流从 0 到 2A,力从 0 到 2000N
k_i = 1000 * i;
% ==========================================
% 2. 状态变量 z 的微分方程 (Bouc-Wen 核心)
% dz/dt = dx - beta|dx|z|^nsgn(z) - gammdx|z|^n
% ==========================================
% 注意:这里使用 persistent 变量来存储上一时刻的 z 值
% 在 Simulink 中,更推荐使用 “State” 定义或在 Simulink 层面使用 Integrator
% 由于 MATLAB Function 无法直接积分,这里演示计算 dzdt
% 实际使用时,你需要在 Simulink 中用 Integrator 积分 dzdt 得到 z
% 这里为了完整性,假设我们已经有了 z (在复杂模型中,z 是状态变量)
% 假设 z 是上一时刻的值(简化演示,实际需用 Integrator)
% 在真实模型中,dzdt 应该连接到 Integrator,输出 z 再反馈回来
persistent z_val
if isempty(z_val)
z_val = 0; % 初始状态
end
% 计算 dzdt
abs_dx = abs(dx);
abs_z = abs(z_val);
sgn_z = sign(z_val);
dzdt = A * dx - beta * abs_dx * (abs_z^n) * sgn_z - gamma * dx * (abs_z^n);
% 更新 z (欧拉法近似,实际用 Simulink Integrator 更好)
% z_val = z_val + dzdt * dt; % (Simulink 会自动处理积分)
% 这里我们假设 z_val 已经由外部积分器提供,或者我们简单更新
% 为了演示,我们直接计算 z (仅用于测试)
% 实际部署时,请移除此行,改为输入端口输入 z
z_val = z_val + dzdt * 0.001;
% ==========================================
% 3. 计算阻尼力 Fmr
% ==========================================
% Fmr = cdx + k0x + alpha*z + k_i * (非线性项)
% 简化版本:考虑电流对刚度的影响
Fmr = c0 * dx + k0 * x + alpha * z_val + k_i * z_val;
end
搭建建议
积分器处理:Bouc-Wen 模型中的 z 是一个状态变量(dot{z} = f(x, dot{x}))。在 Simulink 中,不要在 MATLAB Function 里用 persistent 变量做积分,那样精度低且不稳定。
正确做法:在 Simulink 层面,使用一个 Integrator 模块。输入是上面代码中的 dzdt,输出是 z。然后将 z 反馈回 MATLAB Function 或用于力的计算。
微分模块:图中的 frac{Delta u}{Delta t} 如果是位移信号,则代表加速度。在 Simulink 中,直接用 Derivative 模块即可,但要注意噪声问题。
输入信号:图中的波形发生器通常是正弦波(Sine Wave),用于模拟路面激励或振动台输入。
完整的 Simulink 连接逻辑
Sine Wave (幅值 0.01m, 频率 1Hz) -> Integrator (得到位移 x)。
Integrator 输出 -> Derivative (得到速度 dx)。
Constant (电流 0~2A) -> 输入到阻尼器模块。
位移 x 和 速度 dx 以及 电流 -> 输入到 MATLAB Function (即上面的代码)。
MATLAB Function 输出 力 Fmr -> Scope。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 7
7 0
0- 0



 已为社区贡献46条内容
已为社区贡献46条内容

所有评论(0)