二自由度机械臂MPC控制MATLAB代码功能说明
·
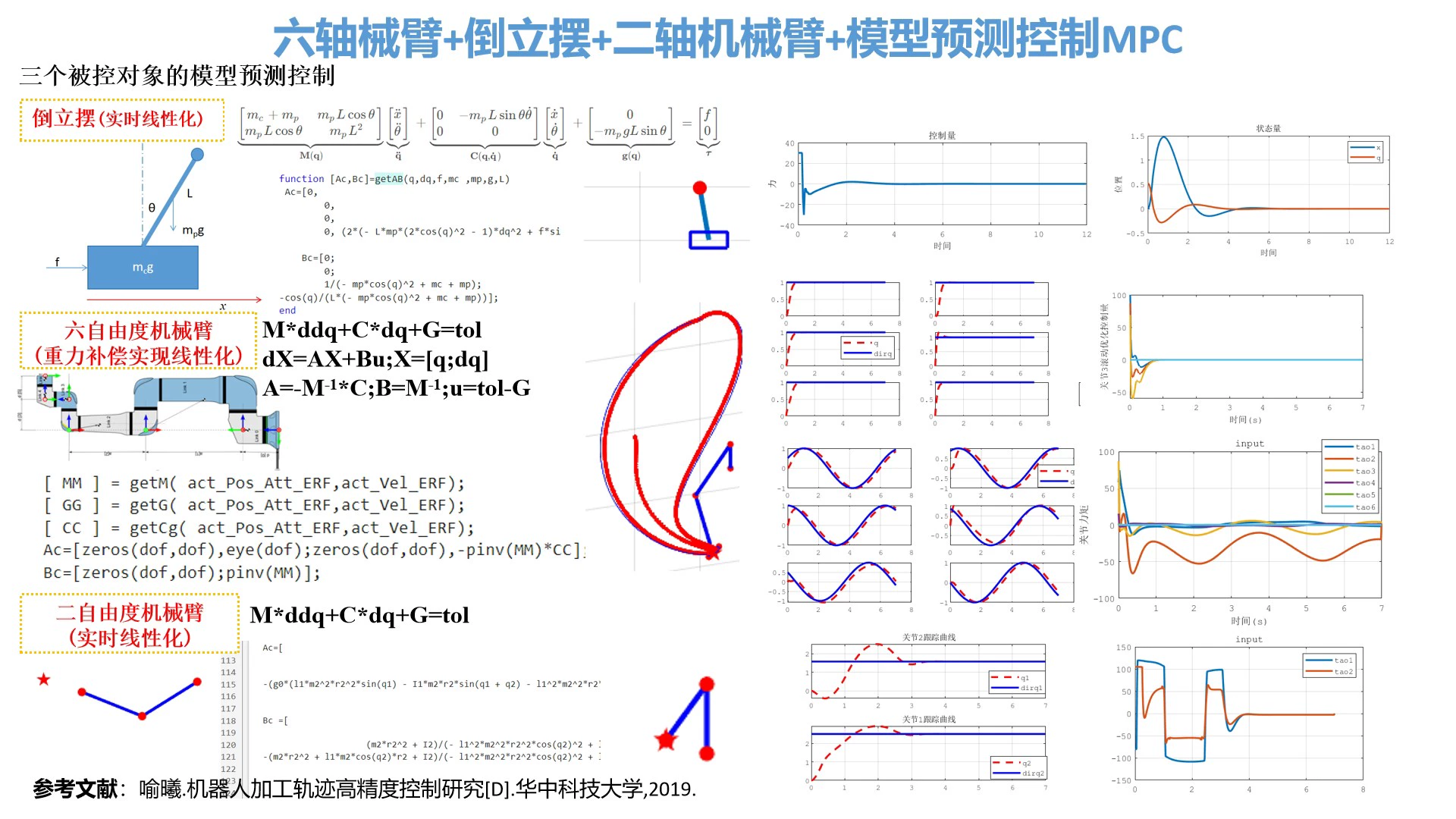
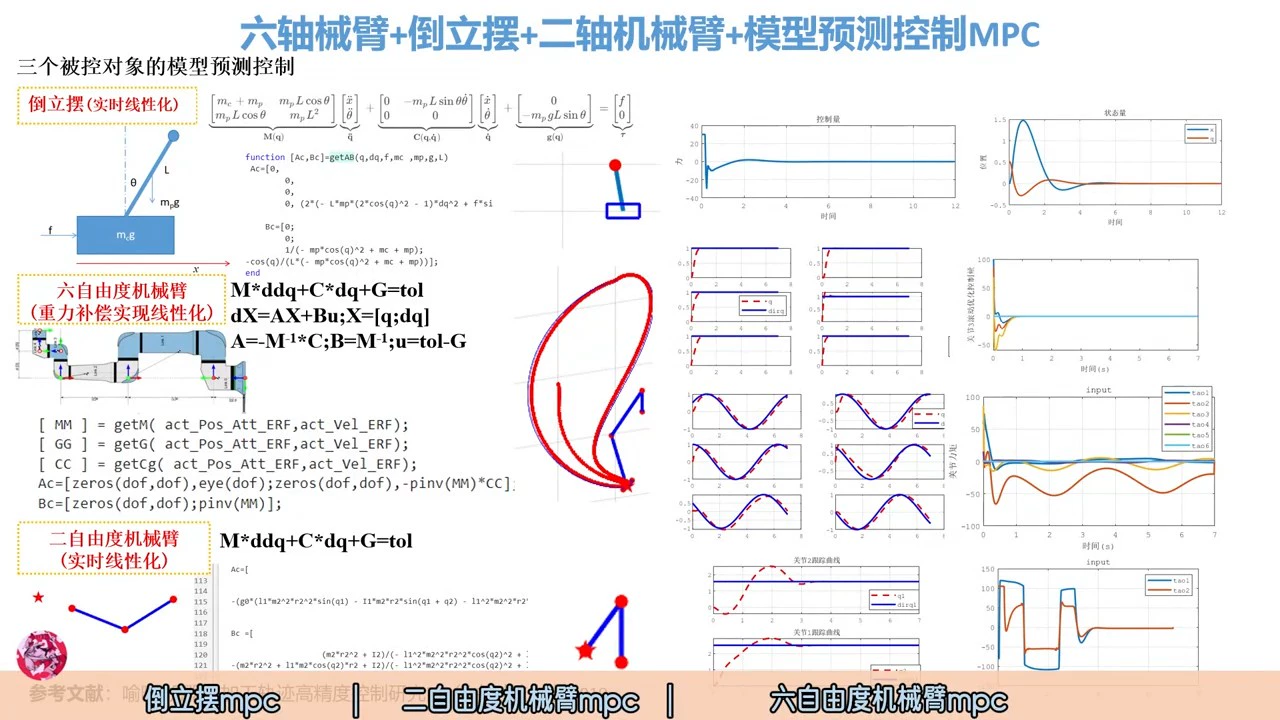
六自由度机械臂mpc模型预测控制+倒立摆+二自由度机械臂
一、整体功能概述
本套MATLAB代码实现了二自由度机械臂的模型预测控制(MPC) ,核心目标是通过实时非线性模型线性化与滚动时域优化,使机械臂关节角度精准跟踪期望轨迹,并输出稳定的控制力矩。代码涵盖机械臂动力学建模、正运动学计算、轨迹生成、MPC控制器设计及仿真结果可视化全流程,适用于二自由度机械臂的运动控制算法验证与性能分析。
二、核心文件功能拆解
1. 动力学模型文件(RobDyn.m)
功能定位
基于拉格朗日方程,计算机械臂的状态导数(角速度与角加速度),是机械臂运动仿真的核心动力学模块。
输入参数
tao:2×1向量,机械臂两个关节的控制力矩(输入控制量);X:4×1向量,机械臂当前状态,包含[q1, q2, dq1, dq2](关节1角度、关节2角度、关节1角速度、关节2角速度);ROB:结构体,存储机械臂物理参数(质量、长度、转动惯量等)。
关键计算步骤
- 提取物理参数:从
ROB中读取关节质量(m1/m2)、连杆长度(l1/l2)、质心距离(r1/r2)、转动惯量(I1/I2)及重力加速度(g0=9.81); - 构建核心矩阵:
-M:惯性矩阵,反映机械臂运动惯性与关节间耦合关系,含cos(q2)项(体现关节2角度对惯性的影响);
-C:科里奥利-离心力矩阵,由Sq(耦合项矩阵)与角速度向量乘积得到,反映运动中的非线性离心力与科里奥利力;
-G:重力矩阵,含cos(q1)与cos(q1+q2)项,反映重力对关节力矩的影响; - 计算角加速度:通过惯性矩阵的伪逆(
pinv(M))求解动力学方程M·ddq + C·dq + G = tao,得到角加速度ddq; - 输出状态导数:返回
dX = [dq1; dq2; ddq1; ddq2],为龙格-库塔法积分提供状态更新依据。
2. MPC控制器文件(RobDynMPC.m)
功能定位
实现模型预测控制的核心逻辑,包括线性化建模、优化目标构建、约束处理及控制力矩求解,是机械臂精准跟踪的核心控制模块。
输入参数
Q/R:4×4/2×2对角矩阵,状态量/控制量权重(调节跟踪精度与控制能耗的平衡);x_k:4×1向量,当前时刻机械臂状态;xd:4×1向量,期望状态(角度与角速度);N:整数,MPC控制时域(预测未来N个时刻的状态与控制量);step:控制周期(与ROB.dt一致);tao:上一时刻控制力矩(用于迭代更新);ROB:机械臂物理参数与约束(力矩上下限lb/ub)。
关键子函数与流程
- getmcg子函数:
- 功能:计算当前状态下的惯性矩阵M、科里奥利-离心力矩阵C、重力矩阵G(与RobDyn.m逻辑一致,为线性化提供基础); - 线性化建模:
- 构建连续时间状态空间模型dx = Ac·x + Bc·(tao - G),其中Ac = [0 0 I; 0 -M⁻¹C],Bc = [0; M⁻¹];
- 离散化:通过零阶保持(ZOH)将连续模型离散为x(k+1) = A·x(k) + B·u(k),其中A = I + step·Ac,B = step·Bc; - 轨迹生成与优化目标构建:
- 调用getTraj生成未来N个时刻的期望状态序列qrArr(线性插值当前状态与期望状态);
- 构建二次规划(QP)目标函数:J = (X - Xref)ᵀQbar(X - Xref) + UᵀRbarU,其中Qbar/Rbar为N+1/N维块对角权重矩阵(状态终端权重F=Q);
- 将目标函数转化为QP标准形式J = 0.5·taoallᵀH·taoall + taouᵀ·taoall,其中H = CᵀQbarC + Rbar,tao_u为线性项; - 约束处理与求解:
- 设置控制力矩约束lb ≤ taoall ≤ ub(每个时刻力矩均需在ROB.lb与ROB.ub之间);
- 调用quadprog求解QP问题,得到未来N个时刻的控制力矩序列taoall;
- 输出当前时刻控制力矩taou = taoall(1:2) + G(补偿重力项,确保控制精度)。
3. 正运动学文件(fkRob.m)
功能定位
计算机械臂连杆端点(含基座、关节1、关节2)的笛卡尔坐标,用于末端位置可视化与轨迹跟踪验证。
输入参数
ROB:机械臂连杆长度l1/l2;q:2×1向量,关节角度[q1, q2];
输出
P:3×2矩阵,每行分别为基座(0,0)、关节1端点(l1cosq1, l1sinq1)、关节2端点(l1cosq1+l2cos(q1+q2), l1sinq1+l2sin(q1+q2))的坐标。
4. 轨迹生成文件(getTraj.m)
功能定位
为MPC提供未来控制时域内的期望状态参考轨迹,采用线性插值确保轨迹平滑性。
输入参数
x:当前状态(4×1);x_des:期望目标状态(4×1);N:控制时域长度;
输出
x_ref:4×N矩阵,每行对应一个状态量(q1/q2/dq1/dq2),每列对应未来一个时刻的期望状态(线性过渡)。
5. 主程序文件(main.m)
功能定位
整合所有模块,实现机械臂MPC控制的全流程仿真,包括参数配置、循环控制、状态更新、结果可视化。
关键步骤
- 参数配置:
- 设置机械臂物理参数(m1=m2=1kg,l1=l2=1m,I1=I2=10kg·m²等);
- 控制参数:控制周期dt=0.01s,总仿真时间T=7s,MPC控制时域p_t=20;
- 权重矩阵Q(状态权重,角度项500×900,角速度项2e-2×900)与R(控制量权重1×1e-1); - 初始化:
- 状态数组q(4×N,存储所有时刻状态)、控制量数组u(2×N,存储所有时刻力矩);
- 初始状态q0=[0,0,0,0](关节角度与角速度均为0),期望状态qd=[pi0.5, pi0.8, 0, 0](关节1期望角度π/2,关节2期望角度0.8π,角速度为0); - 循环控制(核心迭代):
- 每个时刻调用RobDynMPC求解当前控制力矩u(:,i);
- 采用四阶龙格-库塔法(RK4)更新状态:q(:,i+1) = q(:,i) + dt/6·(rk1 + 2rk2 + 2rk3 + rk4),其中rk1~rk4为RK4的四步导数计算; - 结果可视化:
- 状态跟踪图(图1):分上下子图显示关节1/2的实际角度与期望角度对比;
- 控制力矩图(图2):显示两个关节的实时控制力矩;
- MPC滚动优化力矩图:显示未来N个时刻的优化力矩序列;
- 机械臂运动动画:实时绘制连杆端点轨迹,标记当前末端位置(黑色)与期望末端位置(红色),直观观察跟踪效果。
6. 符号计算文件(testsym.m)
功能定位
基于符号计算推导机械臂动力学模型的线性化矩阵(A/B矩阵),为控制器设计提供理论验证(代码中默认注释,可用于算法优化)。
关键功能
- 定义符号变量(关节角度、角速度、力矩、物理参数等);
- 推导动力学方程
F = [dq1; dq2; M⁻¹(tao - G - C)]; - 计算状态矩阵
A = ∂F/∂Z(Z为状态向量)与输入矩阵B = ∂F/∂tao; - 生成MATLAB函数文件
getA.m与getB.m,用于后续线性化模型调用。
三、核心算法原理
1. 二自由度机械臂动力学
基于拉格朗日方程L = T - V(动能T减势能V),推导得到非线性动力学方程:
六自由度机械臂mpc模型预测控制+倒立摆+二自由度机械臂
M(q)·ddq + C(q, dq)·dq + G(q) = tao
M(q):惯性矩阵(对称正定),体现关节位置对惯性的影响;C(q, dq):科里奥利-离心力矩阵,体现角速度与位置的耦合;G(q):重力矩阵,体现重力场对关节的力矩作用;tao:关节控制力矩(输入)。
2. 模型预测控制(MPC)
核心思想
通过“预测-优化-滚动实施”实现非线性系统的稳定控制:
- 预测:基于当前状态与线性化模型,预测未来N个时刻的系统状态;
- 优化:在控制时域内,最小化“状态跟踪误差”与“控制量能耗”的二次目标函数,同时满足控制量约束;
- 滚动实施:仅执行优化得到的第一个时刻控制量,下一时刻重复上述步骤(基于新状态更新模型)。
优势
- 可直接处理控制量约束(如力矩上限),避免机械硬件过载;
- 通过实时线性化适应非线性动力学,兼顾控制精度与计算效率;
- 滚动时域优化可抑制扰动,提升系统鲁棒性。
四、仿真结果说明
1. 角度跟踪曲线(图2)
- 横轴:仿真时间(0~7s);
- 纵轴:关节角度(弧度);
- 曲线含义:红色虚线为实际角度(q1/q2),蓝色实线为期望角度(dirq1/dirq2);
- 预期效果:实际角度应快速收敛至期望角度,稳态误差接近0(需通过调整Q/R权重优化收敛速度与超调)。
2. 控制力矩曲线(图3/4)
- 横轴:仿真时间(0~8s);
- 纵轴:控制力矩(N·m);
- 曲线含义:两条曲线分别对应关节1(tao1)与关节2(tao2)的控制力矩;
- 关键特征:初始时刻力矩较大(用于克服惯性与重力,驱动关节快速响应),稳态时力矩趋于稳定(仅补偿重力与微小扰动),且力矩值始终在
[-100, 100]约束范围内。
五、参数调整与使用建议
1. 权重矩阵Q/R调整
- Q矩阵:增大角度项权重(如Q(1,1)/Q(2,2))可提升角度跟踪精度,但可能导致控制力矩增大;增大角速度项权重(Q(3,3)/Q(4,4))可抑制角速度超调,但可能降低响应速度;
- R矩阵:增大R矩阵权重可减小控制力矩(降低能耗),但可能牺牲跟踪精度,需在“精度”与“能耗”间平衡。
2. 控制时域N调整
- 增大N:可提升预测精度与系统鲁棒性,但会增加QP求解计算量(可能导致实时性下降);
- 减小N:计算效率提升,但预测范围变小(可能导致跟踪误差增大),建议取值范围5~30(需结合控制周期dt选择)。
3. 机械臂物理参数ROB调整
- 若需适配实际机械臂,需将
ROB结构体中的m1/m2(质量)、l1/l2(长度)、I1/I2(转动惯量)等参数替换为实际测量值,确保动力学模型准确性。
4. 约束lb/ub调整
- 根据机械臂电机最大输出力矩设置
ROB.lb与ROB.ub,避免力矩超限导致电机损坏(建议预留10%~20%安全余量)。
六、适用场景与扩展方向
1. 适用场景
- 二自由度旋转关节机械臂的位置控制(如桌面机械臂、教学实验平台);
- MPC控制算法在非线性系统中的验证与教学演示;
- 机械臂运动控制的仿真预研(避免直接在硬件上调试的风险)。
2. 扩展方向
- 多自由度扩展:参考testsym.m中的6自由度符号计算逻辑,将代码扩展至3/6自由度机械臂;
- 轨迹类型扩展:修改
main.m中的qd生成逻辑,支持正弦轨迹、圆弧轨迹等复杂轨迹跟踪; - 扰动与鲁棒性优化:在动力学模型中加入扰动项(如摩擦力、负载变化),并通过增大Q矩阵权重或采用鲁棒MPC提升抗扰能力;
- 硬件联调:将
main.m中的仿真状态更新替换为硬件传感器数据(如编码器角度),控制力矩输出至电机驱动器,实现实际机械臂的控制。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 9
9 0
0- 0



 已为社区贡献33条内容
已为社区贡献33条内容

所有评论(0)