laser-line-segment线段提取开源功能包解读和使用例程
Laser-line-segment 功能包介绍
laser-line-segment 是一个基于种子区域生长算法的二维激光线段提取开源项目,由南开大学机器人与自动化信息系统研究所团队开发,相关论文发表于《International Journal of Advanced Robotic Systems》。该算法针对传统分割合并算法在完整性和计算效率上的不足进行了改进,在走廊、实验室等半结构化室内环境中表现出更优的性能。
一、核心算法原理
该算法的核心创新在于将图像处理领域的种子区域生长思想引入激光点云处理,通过四个主要步骤完成线段提取:
1. 种子段检测
算法首先在连续的激光点中寻找候选种子段。种子段的检测非常严格,需要同时满足两个条件:
- 点到直线的距离
:种子段中的每个点到拟合直线的垂直距离必须小于阈值 ε(通常设为激光雷达的测距精度,如 0.03m)
- 点到预测位置的距离
:每个点与其在直线上的投影点之间的距离必须小于阈值 δ(经验值设为 0.1m),这一条件用于排除断点干扰
拟合直线采用正交最小二乘法,与传统最小二乘法不同,该方法最小化的是点到直线的垂直距离而非 y 轴方向距离,能够获得更准确的直线参数估计。
2. 区域生长
一旦检测到符合条件的种子段,算法便以该种子段为起点向两侧扩展,不断吸收邻近的激光点。与分割合并算法采用递归方式处理整帧数据不同,区域生长策略避免了反复迭代拟合的过程,显著提升了计算效率。
3. 重叠区域处理
当多个生长区域在端点附近出现重叠时,算法会对重叠区域进行特殊处理,确保线段之间的平滑过渡和连接的合理性。
4. 端点生成
最后,算法精确确定每个线段的起点和终点坐标,生成具有清晰端点的完整线段。
二、与分割合并算法的对比优势
传统分割合并算法在处理整帧扫描数据时,容易出现线段中断、端点不准确等问题。而种子区域生长算法通过逐段生长的方式,能够更完整地提取环境中的长线段,同时端点精度更高。
在作者使用 UTM-30LX 激光雷达进行的走廊和实验室环境实验中,该算法在效率、正确性和精度三个维度上均优于经典的分割合并算法。
三、代码结构与安装配置
目录结构
text
laser-line-segment/├── include/ # 头文件,定义算法和数据结构的接口│ └── laserline/ # 具体的头文件目录├── src/ # 源代码文件,实现算法具体细节├── launch/ # ROS启动文件├── CMakeLists.txt # 构建配置文件├── package.xml # ROS包依赖描述文件└── README.md # 项目说明文档
安装步骤
bash
# 克隆项目git clone https://github.com/NKU-MobFly-Robotics/laser-line-segment.git# 创建构建目录cd laser-line-segmentmkdir build && cd build# 配置CMakecmake ..# 编译项目make
依赖项
-
C++ 编译环境(GCC 或 Clang)
-
CMake(3.10 以上版本)
-
Boost 库
-
Eigen 库
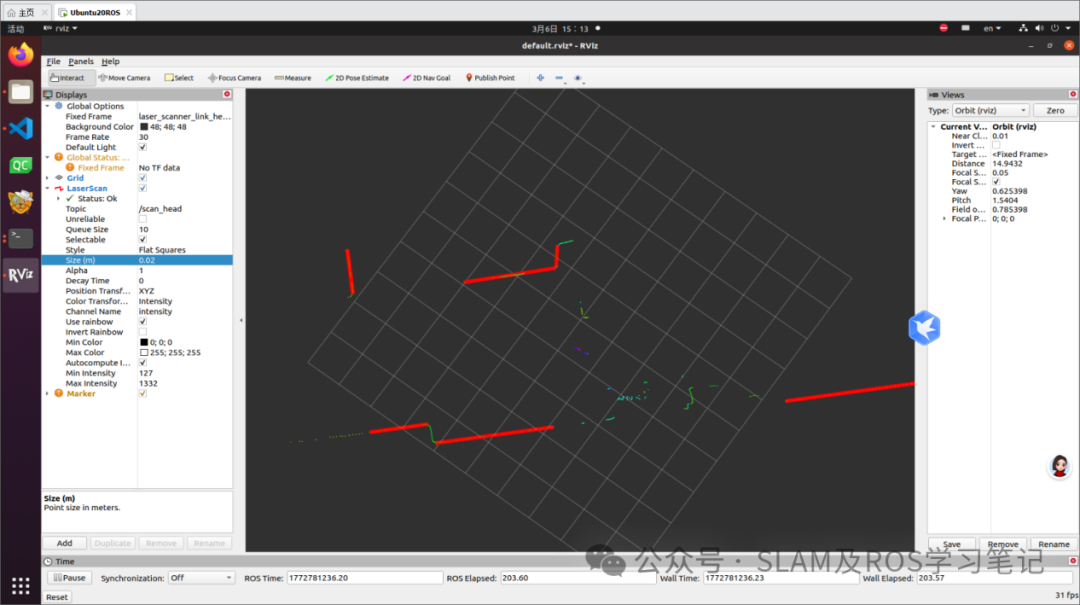
四、运行记录
bash
source /home/kobe/laer_line_segment_ws/devel/setup.shroslaunch laserline laserline.launch
查看当前提取的线段信息:
bash
rostopic echo /publish_line_markers五、在长走廊环境中的适用性
该算法在设计之初就考虑了走廊这类结构化环境的特点。论文明确指出,线段特征在走廊、办公区等半结构化室内环境中具有重要价值,可以为高层环境理解提供基础。
对于长走廊特征提取,该算法具有以下优势:
- 长线段完整性
:区域生长策略能够完整提取走廊两侧的长墙壁线段,避免因噪声或断点导致线段中断
- 端点定位准确
:精确的端点生成为计算墙壁长度和相对位置提供可靠依据
- 抗干扰能力强
:种子段检测中的双阈值条件有效滤除孤立点和噪声点,提高提取鲁棒性
实验数据使用 UTM-30LX 激光雷达采集,测距精度 0.03m,与常用的单线激光雷达参数相近,因此该算法的参数设置对常规单线雷达具有良好的参考价值。
六、与 laser_line_extraction 的对比
laser-line-segment 和 laser_line_extraction 都是用于从激光雷达数据中提取线段的开源 ROS 包,但它们在算法设计、输出信息和适用场景上存在明显差异。
- laser-line-segment
采用种子区域生长算法,通过检测种子段并向两侧扩展生长来提取线段,最终输出线段的端点笛卡尔坐标。该方法的优势在于能够完整地提取长线段(如走廊墙壁),且端点定位精确,因此特别适合结构化环境中的走廊检测等任务。
- laser_line_extraction
则基于分割合并 + 加权最小二乘算法,它首先将点云分割为候选点簇,然后用加权最小二乘法拟合直线,输出线段的极坐标参数(距离
radius和角度angle)及其协方差矩阵。其优势在于提供了拟合不确定性信息(协方差),便于将线段观测作为带权重的约束集成到因子图优化等 SLAM 后端框架中。
针对长走廊特征提取这一具体任务,laser-line-segment 在提取墙壁这类长线段的完整性和端点准确性上可能更具优势,而 laser_line_extraction 的优势则在于其输出的协方差信息为后续与定位优化框架融合提供了便利。
七、应用扩展
该算法可集成到机器人操作系统生态中,与摄像头图像等其他传感器数据融合,应用于 SLAM 建图、路径规划和障碍物识别等任务。在自动驾驶和机器人导航领域,提取的线段特征可用于路面标记识别、墙壁定位和走廊环境理解。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 12
12 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)