ABB IRB 120 三种运动仿真实验
核心目标:本次 30 分钟项目式实训,在 RobotStudio 6.08 中完成 ABB IRB 120 工作站搭建,成功实现单轴运动、线性运动、重定位运动。掌握了三种运动的操作逻辑、坐标切换与安全注意事项,能够独立完成仿真、调试与报告撰写,为后续示教编程、离线仿真与实操奠定基础。
一、项目档案与环境配置卡
1.1 基础信息表
|
项目维度 |
内容项 |
熟练完成 ABB IRB 120 单轴运动、线性运动、重定位运动三种操作 |
备注 / 权重 |
|
项目标识 |
项目名称 |
工业机器人系统认知与虚拟仿真(4 学时) |
核心考核点 |
|
小组成员 |
第几组:毛福笙、陈英成 |
分工明确 |
|
|
指导教师 |
萨仁高娃 |
||
|
硬件环境 |
仿真终端 |
台式机 |
CPU≥i5,内存≥8G,显卡≥2G |
|
外设 |
键鼠、显示器 |
分辨率≥1920*1080 |
|
|
实物参考 |
工业机器人示教器 |
仅认知学习使用 |
|
|
软件环境 |
仿真软件版本 |
RobotStudio 2022/2023 |
记录具体版本号 |
|
操作系统 |
Windows 10/11 64 位 |
需兼容仿真软件 |
|
|
辅助软件 |
截图工具、Visio |
用于绘制系统框图、保存仿真截图 |
1.2 虚拟仿真环境搭建检查表
|
步骤 |
配置项 |
操作标准 / 预期结果 |
学生实测结果 |
异常排查(若有) |
|
1 |
软件安装 |
RobotStudio 完整安装,无组件缺失,可正常启动 |
正常 |
无 |
|
2 |
授权激活 |
完成软件授权验证,仿真功能无限制 |
正常 |
无 |
|
3 |
机器人模型导入 |
成功导入 ABB 机器人模型(如 IRB 120),模型无缺失 |
正常 |
无 |
|
4 |
基础仿真测试 |
机器人可实现关节点动,坐标系切换正常 |
正常 |
无 |
二、核心功能模块与仿真实现
2.1 工业机器人核心参数定义表
|
模块名称 |
核心参数 |
参数说明 |
配置 / 仿真要求 |
备注 |
|
机械结构模块 |
关节数量 / 自由度 |
6 轴工业机器人,6 个旋转自由度 |
明确各关节运动范围、限位值 |
以 ABB IRB 120 为例 |
|
额定负载 / 工作半径 |
额定负载 3kg,最大工作半径 580mm |
仿真中负载设置不超过额定值 |
避免超负载仿真报错 |
|
|
控制系统模块 |
坐标系类型 |
关节坐标系、世界坐标系、工具坐标系、工件坐标系 |
掌握 4 种坐标系的建立与切换方法 |
工具 / 工件坐标系需手动标定 |
|
运动模式 |
关节运动(JOG)、线性运动(LIN)、圆弧运动(CIR) |
实现基础的 JOG、LIN 运动仿真 |
CIR 为后续项目内容 |
|
|
驱动系统模块 |
驱动方式 |
伺服电机驱动 |
了解驱动原理,仿真中无需配置 |
仅理论认知 + 仿真运动效果验证 |
|
仿真环境模块 |
工作cell 组成 |
机器人、底座、工装台面 |
搭建简洁有效的基础仿真工作站 |
无冗余设备,便于基础操作 |
三、实操过程与问题复盘
3.1 项目开发阶段记录表(进度管控)
|
阶段名称 |
具体内容 |
完成度 (%) |
当前状态 |
|
1. 理论认知学习 |
学习工业机器人机械结构、控制系统、驱动系统组成,绘制系统整体组成框图;掌握 4 种坐标系的定义、区别与应用场景,完成理论知识点梳理。 |
100 |
100 |
|
2. 仿真软件安装与配置 |
完成 RobotStudio 软件下载、安装与授权激活,解决安装失败、组件缺失、授权失效等问题;熟悉软件界面,掌握菜单栏、工具栏、仿真窗口的基本操作。 |
100 |
100 |
|
3. 仿真环境搭建 |
新建仿真项目,导入 ABB 标准机器人模型(如 IRB 120),添加工装台面等基础工装,完成工作 cell 的搭建与布局;设置机器人基础参数,检查模型完整性。 |
100 |
100 |
|
4. 坐标系建立与切换 |
在仿真软件中完成关节、世界坐标系的默认验证,手动建立工具坐标系(TCP 点标定)和工件坐标系,掌握 4 种坐标系的切换方法,验证坐标系切换后的运动准确性。 |
100 |
100 |
|
5. 基础运动仿真编程 |
编写机器人基础运动程序,实现关节运动(JOG)的点动与连续运动、线性运动(LIN)的定点移动;设置运动速度、加速度参数,完成运动轨迹的仿真与验证。 |
100 |
100 |
|
6. 运动精度测试与报告整理 |
对仿真运动轨迹进行精度验证,记录运动点位坐标与误差值;整理仿真过程截图、参数数据,完成实验报告的编写。 |
100 |
100 |
3.2 虚拟仿真开发疑难问题排查表(核心价值区)
|
问题编号 |
错误现象 / 报错信息 (截图粘贴处) |
涉及模块 |
初步猜测原因 |
解决过程或代码修正 |
最终效果 |
经验总结 |
|
1 |
RobotStudio 安装失败,提示 “组件缺失” |
软件安装 |
系统缺少 VC++ 运行库、.NET Framework 等依赖组件;安装包损坏 |
下载并安装对应版本的 VC++ 运行库、.NET Framework;重新下载完整安装包并安装 |
软件正常安装,可启动无报错 |
安装前检查系统依赖,使用官方完整安装包 |
|
2 |
导入机器人模型后,模型显示残缺、无关节 |
模型导入 |
模型文件损坏;软件版本与模型版本不兼容 |
重新导入官方标准机器人模型;更换与软件匹配的模型文件 |
机器人模型完整,各关节可识别 |
优先使用软件自带的标准机器人模型 |
|
3 |
坐标系切换后,机器人运动方向与预期不符 |
坐标系配置 |
工具坐标系 TCP 点标定错误;工件坐标系原点设置错误 |
重新标定 TCP 点,核对坐标值;重新设置工件坐标系原点,验证坐标准确性 |
坐标系切换后,机器人运动方向与预期一致 |
标定坐标系后需做小范围运动验证,避免参数错误 |
|
4 |
编写运动程序后,机器人无法运动,提示 “运动超限” |
程序编写 / 参数设置 |
运动点位超出机器人关节限位 / 工作半径;速度参数设置异常 |
修改运动点位坐标,确保在工作范围内;检查并重置速度、加速度参数至合理值 |
机器人可正常运动,无超限报错 |
编程前确认机器人工作范围,参数设置遵循软件默认规范 |
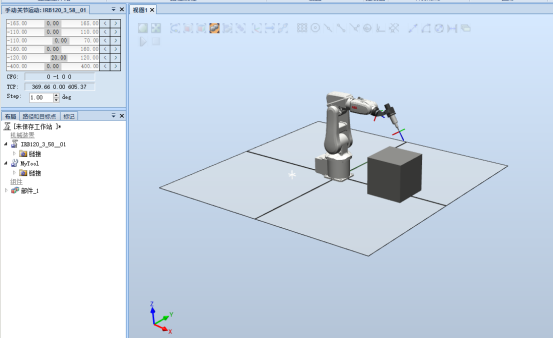
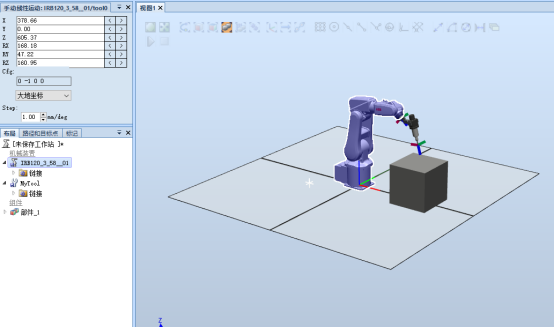
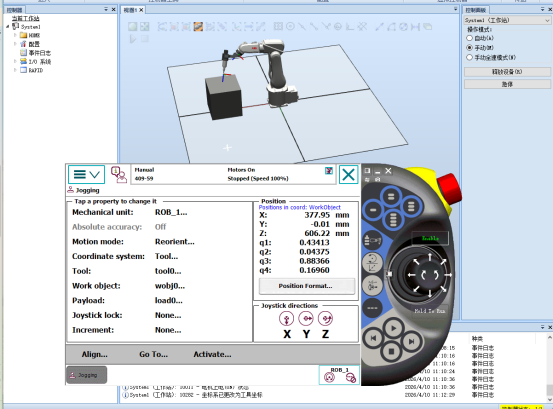
四、截图
单轴运动
线性运动
重定位运动

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 9
9 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)