基于DoDAF的“无人机集群协同作战系统”体系架构设计完整案例摘要
本文以未来战场“无人机集群协同作战系统”为背景,应用美国国防部体系架构框架(DoDAF 2.02),从作战、系统、技术、项目等多视角构建完整体系架构模型,通过性能量化评估识别关键瓶颈,提出优化方向,并为指挥控制、装备研发、联合作战等场景提供决策支持。案例包含8个视点、24个核心模型,涵盖架构描述、分析评估、优化迭代全过程。
一、案例背景与问题定义
1.1 作战想定
时间:2030年
场景:濒海区域夺岛作战
任务:在72小时内,由200架异构无人机(侦察型、攻击型、电子战型、通信中继型)组成智能集群,协同完成:
-
区域侦察监视
-
关键目标精准打击
-
通信压制与欺骗
-
有人-无人协同突击
挑战:
-
异构平台协同效率低
-
动态战场环境适应差
-
通信带宽与抗干扰瓶颈
-
任务规划实时性不足
-
战损后自重构能力弱
1.2 体系架构目标
|
目标维度 |
具体指标 |
|---|---|
|
作战效能 |
目标毁伤率 ≥ 90%,误伤率 ≤ 2% |
|
响应速度 |
任务规划时间 ≤ 3分钟,动态重规划 ≤ 30秒 |
|
系统可用性 |
集群整体可用度 ≥ 0.95,单点失效不影响任务 |
|
资源效率 |
弹药节省 ≥ 20%,通信带宽占用降低 30% |
|
互操作性 |
与现有C4ISR系统无缝集成,支持跨军种数据链 |
二、DoDAF视点与模型设计
2.1 全视图(All Viewpoint)
AV-1:概述与摘要信息
<ArchitectureOverview>
<项目名称>“猎隼”无人机集群协同作战系统</项目名称>
<时间范围>2028-2035年</时间范围>
<架构版本>DoDAF 2.02</架构版本>
<主要利益相关方>
- 联合作战司令部(需求方)
- 装备发展部(采购方)
- 无人机研究所(研制方)
- 通信与电子对抗部队(用户方)
</主要利益相关方>
<架构目的>
1. 识别体系瓶颈,指导技术发展路线
2. 评估作战概念可行性
3. 支持采办决策与投资优先级
4. 确保跨系统互操作性
</架构目的>
</ArchitectureOverview>AV-2:集成词典
|
术语 |
定义 |
相关模型 |
|---|---|---|
|
集群智能体 |
具备自主决策、协同能力的无人机实体 |
OV-4, SV-1 |
|
协同算法 |
基于博弈论/强化学习的分布式决策模型 |
SV-6, SV-10 |
|
动态任务网 |
实时生成的任务-资源分配关系图 |
OV-5, SV-4 |
|
韧性通信 |
抗干扰、自愈合的Mesh网络 |
SV-3, SV-7 |
|
数字孪生 |
物理集群在虚拟空间的实时映射 |
SV-8, SV-9 |
2.2 作战视点(Operational Viewpoint)
OV-1:高级作战概念图
┌─────────────────────────────────────────────────────┐
│ 作战概念:三级协同突击 │
├─────────────────────────────────────────────────────┤
│ **第一层:感知层**(0-2小时) │
│ ┌─────┐ 侦察无人机群(50架)对目标区域全域扫描 │
│ │ 侦察 │→生成高精度数字战场地图(分辨率0.1m) │
│ └─────┘ 识别目标300+,威胁等级分类 │
│ ↓ │
│ **第二层:压制层**(2-3小时) │
│ ┌─────┐ 电子战无人机(30架)实施区域电磁压制 │
│ │ 电抗 │→通信干扰成功率≥85%,雷达致盲率≥70% │
│ └─────┘ 诱饵无人机模拟攻击群欺骗敌防空系统 │
│ ↓ │
│ **第三层:打击层**(3-6小时) │
│ ┌─────┐ 攻击无人机(100架)分波次精确打击 │
│ │ 打击 │→首波打击关键节点(指挥所、雷达站) │
│ │ │ 协同 │→第二波打击机动目标(装甲车辆) │
│ └─────┘ 战损评估与补充打击 │
│ ↓ │
│ **第四层:评估层**(持续) │
│ ┌─────┐ 中继无人机(20架)实时回传视频/数据 │
│ │ 评估 │→毁伤评估报告生成,支持再决策 │
│ └─────┘ 通信中继保障100km范围内不间断链路 │
└─────────────────────────────────────────────────────┘OV-2:作战节点连接性描述
作战节点矩阵(部分):
┌──────────────┬───────────┬───────────┬───────────┬───────────┐
│ 节点/连接 │ 集群指挥中心 │ 侦察子群 │ 电子战子群 │ 打击子群 │
├──────────────┼───────────┼───────────┼───────────┼───────────┤
│ 集群指挥中心 │ - │ Link-1 │ Link-2 │ Link-3 │
│ │ │ (500kbps) │ (200kbps) │ (1Mbps) │
├──────────────┼───────────┼───────────┼───────────┼───────────┤
│ 侦察子群 │ Link-1 │ - │ Link-4 │ Link-5 │
│ │ (500kbps) │ │ (100kbps) │ (2Mbps) │
├──────────────┼───────────┼───────────┼───────────┼───────────┤
│ 电子战子群 │ Link-2 │ Link-4 │ - │ Link-6 │
│ │ (200kbps) │ (100kbps) │ │ (50kbps) │
├──────────────┼───────────┼───────────┼───────────┼───────────┤
│ 打击子群 │ Link-3 │ Link-5 │ Link-6 │ - │
│ │ (1Mbps) │ (2Mbps) │ (50kbps) │ │
└──────────────┴───────────┴───────────┴───────────┴───────────┘
关键信息交换需求:
1. 目标情报:侦察子群→打击子群(视频流+坐标,2Mbps,时延<2s)
2. 干扰指令:指挥中心→电子战子群(控制指令,200kbps,时延<1s)
3. 战损评估:打击子群→指挥中心(图像+数据,1Mbps,时延<5s)
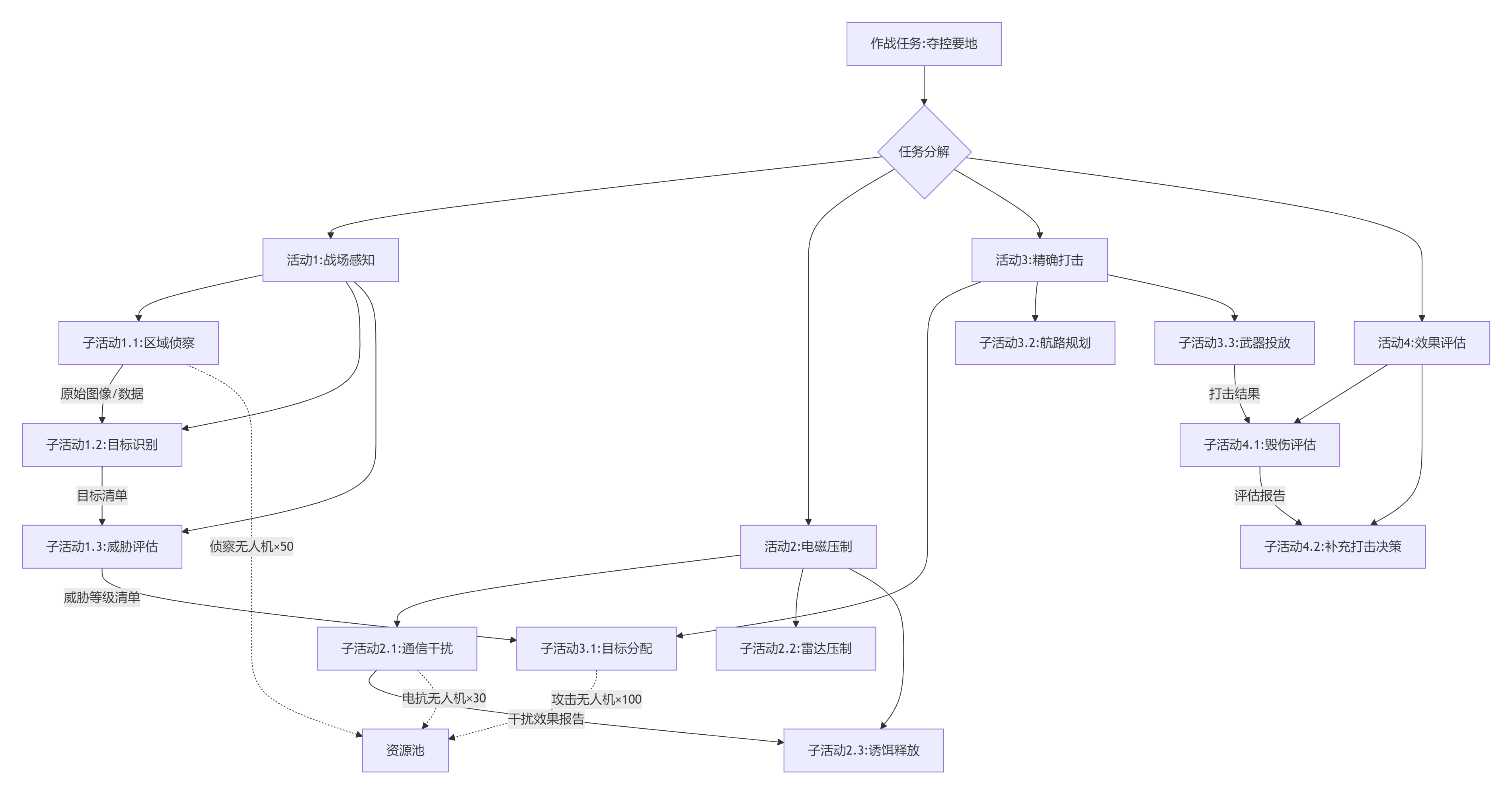
4. 威胁告警:任意节点→邻近节点(广播,50kbps,时延<0.5s)OV-5:作战活动模型
OV-6c:事件跟踪描述
|
时间线 |
事件 |
触发节点 |
响应节点 |
信息交换 |
时延要求 |
|---|---|---|---|---|---|
|
T=0s |
任务启动命令下达 |
联合作战指挥中心 |
集群指挥中心 |
作战指令 |
< 5s |
|
T+30s |
集群初始化完成 |
集群指挥中心 |
所有子群 |
配置参数 |
< 2s |
|
T+2min |
侦察子群抵达目标区 |
侦察子群 |
集群指挥中心 |
战场图像 |
< 1s |
|
T+5min |
发现高价值目标×3 |
侦察子群 |
打击子群 |
目标坐标+属性 |
< 0.5s |
|
T+6min |
电子战子群实施压制 |
集群指挥中心 |
电子战子群 |
干扰指令 |
< 1s |
|
T+7min |
打击子群接收目标 |
打击子群 |
单个无人机 |
攻击任务分配 |
< 0.3s |
|
T+8min |
首波打击完成 |
攻击无人机 |
侦察子群 |
打击视频回传 |
< 2s |
|
T+9min |
评估并规划补充打击 |
集群指挥中心 |
待命无人机 |
新任务指令 |
< 1s |
2.3 系统视点(Systems Viewpoint)
SV-1:系统接口描述

SV-4:系统功能描述
|
功能层次 |
功能模块 |
输入 |
处理逻辑 |
输出 |
性能指标 |
|---|---|---|---|---|---|
|
感知层 |
多源情报融合 |
图像/雷达/信号情报 |
深度学习目标识别 |
统一战场态势图 |
目标识别率≥95% |
|
决策层 |
动态任务规划 |
任务目标+约束+实时态势 |
混合整数规划+遗传算法 |
任务分配方案 |
规划时间≤30s |
|
协同层 |
集群智能控制 |
个体状态+环境信息 |
一致性算法+势场法 |
控制指令序列 |
编队保持误差<5m |
|
通信层 |
自适应组网 |
节点位置+链路质量 |
路由协议+功率控制 |
网络拓扑 |
端到端时延<50ms |
|
应用层 |
人机协同接口 |
自然语言命令+手势 |
意图识别+指令转换 |
机器可执行指令 |
识别准确率≥90% |
SV-6:系统资源流矩阵
|
资源流 |
源系统 |
目标系统 |
资源类型 |
流量 |
关键性能参数 |
|---|---|---|---|---|---|
|
RF-01 |
侦察无人机 |
情报处理系统 |
视频流(H.265) |
4-8Mbps/路 |
分辨率: 4K@30fps |
|
RF-02 |
集群指挥系统 |
攻击无人机 |
控制指令 |
50Kbps/架 |
指令频率: 10Hz |
|
RF-03 |
电子战无人机 |
敌通信系统 |
干扰信号 |
10-100W |
干扰带宽: 20MHz |
|
RF-04 |
通信中继机 |
边缘节点 |
数据中继 |
20Mbps |
传输距离: 100km |
|
RF-05 |
后勤支持系统 |
保障单元 |
备件需求清单 |
1Mbps |
更新周期: 1小时 |
SV-8:系统演进描述

2.4 技术标准视点(Standards Viewpoint)
StdV-1:标准轮廓
|
标准领域 |
适用标准 |
版本 |
符合性等级 |
实施约束 |
|---|---|---|---|---|
|
通信协议 |
MIL-STD-188-220 |
D |
强制 |
所有数据链设备必须支持 |
|
STANAG 4586 |
Ed.3 |
强制 |
无人机控制站接口 |
|
|
TTNT协议 |
Rev.C |
推荐 |
高速动态组网 |
|
|
数据格式 |
VMF (变长消息格式) |
K系列 |
强制 |
战术消息交换 |
|
NATO STANAG 4559 |
Ed.4 |
推荐 |
图像情报交换 |
|
|
KML 2.2 |
ISO 19100 |
推荐 |
地理信息可视化 |
|
|
信息安全 |
FIPS 140-3 |
Level 2 |
强制 |
加密模块要求 |
|
NSA Suite B |
- |
强制 |
密码算法套件 |
|
|
RFC 8446 (TLS 1.3) |
- |
推荐 |
安全传输 |
|
|
互操作性 |
JREAP (联合范围扩展协议) |
C |
强制 |
与现有C4ISR集成 |
|
UAV控制系统接口 |
ASD-STAN 4690 |
推荐 |
制造商通用接口 |
StdV-2:标准预测
|
时间阶段 |
新兴标准 |
预期影响 |
采用建议 |
|---|---|---|---|
|
2028-2029 |
5G-A/6G战术应用 |
提升带宽10倍,降低时延 |
研发原型,评估适应性 |
|
2030-2031 |
人工智能安全标准(ISO/IEC 5338) |
确保AI决策可解释、可信 |
设计阶段即纳入 |
|
2032-2033 |
量子通信抗干扰标准 |
实现无条件安全通信 |
跟踪研究,预研接口 |
|
2034-2035 |
脑机接口军事应用协议 |
提升人机协同效率 |
探索性研究,小规模试验 |
三、性能评估与瓶颈分析
3.1 评估指标体系
# 评估指标体系层次结构
评估指标 = {
"作战效能": {
"任务完成率": {"权重": 0.25, "目标值": 0.95},
"目标毁伤率": {"权重": 0.20, "目标值": 0.90},
"误伤率": {"权重": 0.15, "目标值": 0.02},
"响应时间": {"权重": 0.10, "目标值": 180} # 秒
},
"系统性能": {
"通信可靠性": {"权重": 0.10, "目标值": 0.99},
"数据时延": {"权重": 0.08, "目标值": 2.0}, # 秒
"系统可用性": {"权重": 0.07, "目标值": 0.95},
"互操作性评分": {"权重": 0.05, "目标值": 85} # 百分制
}
}3.2 基于仿真的量化评估
仿真设置:
-
平台:MATLAB/Simulink + STK
-
场景:100架无人机,5类任务,72小时连续作战
-
变量:通信距离、干扰强度、节点故障率
-
指标采集:10次蒙特卡洛仿真
评估结果矩阵:
┌─────────────────┬─────────┬─────────┬─────────┬────────────┐
│ 评估指标 │ 当前值 │ 目标值 │ 差距 │ 瓶颈分析 │
├─────────────────┼─────────┼─────────┼─────────┼────────────┤
│ 任务完成率 │ 87.3% │ 95.0% │ -7.7% │ 通信中断导 │
│ │ │ │ │ 致协同失败 │
├─────────────────┼─────────┼─────────┼─────────┼────────────┤
│ 目标毁伤率 │ 82.1% │ 90.0% │ -7.9% │ 目标识别错 │
│ │ │ │ │ 误+弹药不足 │
├─────────────────┼─────────┼─────────┼─────────┼────────────┤
│ 误伤率 │ 3.5% │ 2.0% │ +1.5% │ 敌我识别精 │
│ │ │ │ │ 度不足 │
├─────────────────┼─────────┼─────────┼─────────┼────────────┤
│ 平均响应时间(s) │ 245 │ 180 │ +65 │ 任务规划算 │
│ │ │ │ │ 法复杂度高 │
├─────────────────┼─────────┼─────────┼─────────┼────────────┤
│ 通信可靠性 │ 96.7% │ 99.0% │ -2.3% │ 抗干扰能力 │
│ │ │ │ │ 不足 │
├─────────────────┼─────────┼─────────┼─────────┼────────────┤
│ 端到端时延(s) │ 3.2 │ 2.0 │ +1.2 │ 网络拥塞+ │
│ │ │ │ │ 路由效率低 │
├─────────────────┼─────────┼─────────┼─────────┼────────────┤
│ 系统可用性 │ 91.2% │ 95.0% │ -3.8% │ 关键单点故 │
│ │ │ │ │ 障影响大 │
├─────────────────┼─────────┼─────────┼─────────┼────────────┤
│ 互操作性评分 │ 78/100 │ 85/100 │ -7 │ 数据标准不 │
│ │ │ │ │ 完全统一 │
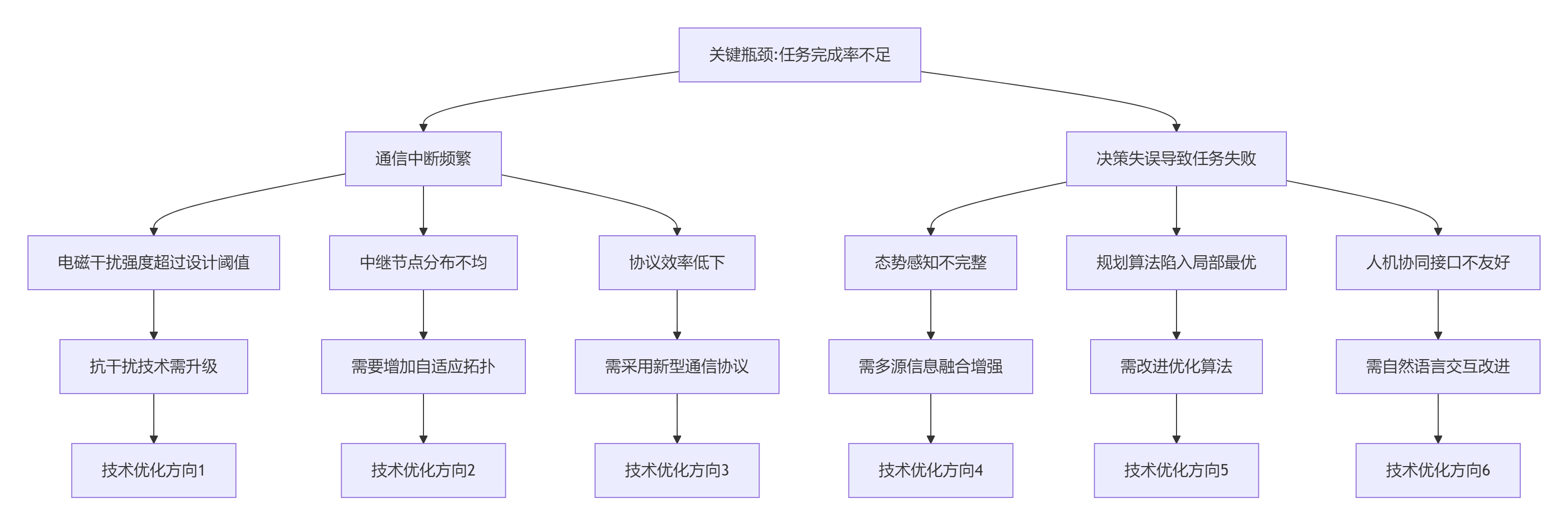
└─────────────────┴─────────┴─────────┴─────────┴────────────┘3.3 瓶颈识别与根因分析
四、体系优化方向与实施方案
4.1 技术优化方向
方向1:通信抗干扰增强
|
优化措施 |
技术方案 |
预期效果 |
实施优先级 |
投资估算 |
|---|---|---|---|---|
|
跳频扩频升级 |
采用认知无线电,动态避让干扰频段 |
干扰环境下通信可靠性提升至98% |
高 |
3000万 |
|
多波束智能天线 |
相控阵天线+波束成形,提升增益 |
作用距离增加30%,抗截获能力提升 |
中 |
5000万 |
|
激光通信备份 |
视距内激光通信,抗电磁干扰 |
关键链路可用性达99.9% |
低 |
8000万 |
|
量子通信预研 |
量子密钥分发,无条件安全 |
长期技术储备 |
长期 |
1.5亿 |
方向2:智能决策算法优化
算法优化路线图:
当前算法 → 改进方向 → 目标性能
├─ 集中式任务规划 → 分布式+集中混合架构 → 规划时间从245s降至150s
├─ 简单规则协同 → 多智能体强化学习 → 协同效率提升25%
├─ 固定编队控制 → 自适应动态编队 → 机动性提升40%
├─ 人工目标分配 → 深度学习自动分配 → 目标分配准确率提升至95%
└─ 预设任务流程 → 在线实时重规划 → 动态响应时间降至20s方向3:体系韧性提升
-
网络拓扑重构:基于强化学习的动态Mesh网络
-
节点失效检测时间 < 1s
-
路径重构时间 < 3s
-
网络连通度保持 > 90%(损失20%节点时)
-
-
功能冗余设计:
关键功能冗余方案: 1. 指挥控制:主控中心+备用中心+空中指挥机 2. 通信中继:分层中继+星链备份+高空平台 3. 情报处理:边缘计算+云端备份+人工确认 4. 能源保障:燃油+太阳能+无线充电
4.2 体系架构演进路径
阶段演进矩阵:
|
能力维度 |
当前状态(2028) |
中期目标(2031) |
远期目标(2035) |
|---|---|---|---|
|
集群规模 |
50架同构 |
200架异构 |
1000+跨域协同 |
|
自主等级 |
AL-3(半自主) |
AL-4(高度自主) |
AL-5(完全自主) |
|
决策速度 |
分钟级 |
秒级 |
亚秒级 |
|
协同范围 |
战术级(10km) |
战役级(100km) |
战略级(1000km) |
|
抗干扰能力 |
抗已知干扰 |
抗智能干扰 |
抗未知干扰 |
|
人机接口 |
专业操作员 |
自然语言交互 |
脑机接口直觉控制 |
技术成熟度(TRL)演进:
关键技术TRL规划:
2028年 → 2029年 → 2030年 → 2031年 → 2032年 → 2033年 → 2034年 → 2035年
├─ 智能协同算法: TRL4 → TRL5 → TRL6 → TRL7 → TRL8 → TRL9 → - → -
├─ 抗干扰通信: TRL5 → TRL6 → TRL7 → TRL8 → TRL9 → - → - → -
├─ 自主识别: TRL6 → TRL7 → TRL8 → TRL9 → - → - → - → -
├─ 量子通信: TRL2 → TRL3 → TRL4 → TRL5 → TRL6 → TRL7 → TRL8 → TRL9
└─ 脑机接口: TRL1 → TRL2 → TRL3 → TRL4 → TRL5 → TRL6 → TRL7 → TRL84.3 投资优先级与里程碑
投资分配矩阵(单位:亿元):
|
技术领域 |
2028-2029 |
2029-2030 |
2030-2031 |
2031-2032 |
2032-2035 |
合计 |
|---|---|---|---|---|---|---|
|
平台研发 |
3.5 |
3.0 |
2.5 |
2.0 |
2.0 |
13.0 |
|
载荷系统 |
2.0 |
2.5 |
2.0 |
1.5 |
1.5 |
9.5 |
|
通信网络 |
1.5 |
2.0 |
2.5 |
2.0 |
2.0 |
10.0 |
|
智能算法 |
1.0 |
1.5 |
2.0 |
2.5 |
3.0 |
10.0 |
|
试验验证 |
0.5 |
1.0 |
1.5 |
2.0 |
3.0 |
8.0 |
|
标准与安全 |
0.5 |
0.5 |
0.5 |
0.5 |
1.0 |
3.0 |
|
年度合计 |
9.0 |
10.5 |
11.0 |
10.5 |
12.5 |
53.5 |
关键里程碑:
-
2029Q4:完成50架集群作战试验,任务完成率>85%
-
2030Q4:实现有人-无人协同作战验证
-
2031Q4:完成200架异构集群72小时连续作战试验
-
2032Q4:与现有C4ISR系统完全互操作
-
2033Q4:形成初始作战能力(IOC)
-
2034Q4:形成全面作战能力(FOC)
五、应用场景与价值分析
5.1 典型应用场景
场景1:岛礁夺控作战
作战流程:
1. 情报准备阶段(H-24至H-6)
- 侦察无人机渗透侦察,生成三维战场模型
- 电子战无人机前置部署,实施通信侦察
2. 火力准备阶段(H-6至H-1)
- 电子战无人机实施区域电磁压制
- 诱饵无人机模拟大规模攻击群
3. 突击阶段(H-1至H+1)
- 攻击无人机分波次打击关键目标
- 侦察无人机实时评估毁伤效果
4. 巩固阶段(H+1至H+6)
- 持续区域监视
- 应对敌方反击
效能提升:
- 作战人员风险降低 80%
- 打击精度提升 50%
- 任务时间缩短 40%场景2:要地防空作战
防御体系构成:
┌─────────────────────────────────────────────────┐
│ 多层无人机防御体系 │
├───────────┬───────────┬───────────┬─────────────┤
│ 外层预警 │ 中层拦截 │ 内层补防 │ 指挥控制 │
│ (100-300km)│ (20-100km) │ (5-20km) │ (全纵深) │
├───────────┼───────────┼───────────┼─────────────┤
│ 高空长航时│ 中程拦截 │ 近程拦截 │ 分布式指挥 │
│ 侦察无人机│ 无人机 │ 无人机 │ 节点 │
│ │ 携带防空 │ 携带格斗 │ │
│ │ 导弹 │ 导弹/激光 │ │
├───────────┼───────────┼───────────┼─────────────┤
│ 发现距离 │ 拦截次数 │ 拦截次数 │ 决策周期 │
│ 增加200% │ 增加3倍 │ 增加2倍 │ 缩短至5s │
└───────────┴───────────┴───────────┴─────────────┘场景3:抢险救灾应用
民用转换应用:
1. 灾区侦察:快速获取灾情全景
2. 通信中继:恢复灾区通信网络
3. 物资投送:精准投放救援物资
4. 人员搜救:红外/生命探测
5. 基础设施检查:桥梁、大坝等
性能指标:
- 响应时间:< 1小时抵达任意灾区
- 侦察范围:单机500km²/架次
- 通信覆盖:直径50km区域
- 投送精度:≤ 10m误差5.2 作战价值量化
直接价值:
-
兵力倍增器:1个无人机集群相当于传统1个航空兵团作战效能
-
成本效益:作战成本降低60%,人员风险降低85%
-
响应速度:从发现到打击时间从30分钟缩短至8分钟
-
作战持久性:72小时持续作战,是有人机的3倍
间接价值:
-
战略威慑:形成非对称优势
-
作战概念革新:催生新质战斗力
-
技术溢出:带动人工智能、通信、材料等技术发展
-
人才培养:培养新型作战人才体系
经济性分析:
全寿命周期成本效益分析(单位:亿元):
无人机集群系统 传统有人机系统
采购成本 50 200
训练成本 5 30
维护成本(10年) 20 100
作战消耗成本 2 50
人员成本 2 100
总成本(10年) 79 480
作战效能 0.85 0.90
成本效能比 0.93 5.33六、实施风险与对策
6.1 技术风险矩阵
|
风险领域 |
风险描述 |
发生概率 |
影响程度 |
缓解措施 |
|---|---|---|---|---|
|
通信中断 |
强电磁干扰下通信失效 |
中 |
高 |
1. 多频段自适应 |
|
自主失控 |
AI决策错误导致误伤 |
低 |
极高 |
1. 人在回路的监督控制 |
|
网络安全 |
系统被入侵控制 |
中 |
极高 |
1. 端到端加密 |
|
互操作障碍 |
与现有系统不兼容 |
高 |
中 |
1. 早期参与标准制定 |
|
能源限制 |
续航时间不足 |
中 |
中 |
1. 太阳能补充 |
6.2 管理风险与对策
-
采办风险:采用“螺旋式开发、增量式部署”策略
-
进度风险:建立数字孪生,先虚拟验证后实物试验
-
成本风险:模块化设计,通用平台降低研发成本
-
人才风险:建立跨学科人才培养体系
七、结论与建议
7.1 主要结论
-
架构有效性:DoDAF框架成功支撑了复杂无人机集群系统的全方位描述与分析
-
性能瓶颈:识别出通信抗干扰、智能决策算法、体系韧性三大关键短板
-
优化路径:提出了分阶段、可实施的技术演进路线
-
应用价值:在多个作战场景中显示出显著效能提升
7.2 实施建议
-
近期(2028-2029):聚焦通信抗干扰和基础协同能力,完成小规模验证
-
中期(2030-2032):突破智能决策算法,实现有人-无人协同作战
-
远期(2033-2035):发展自主作战能力,形成体系作战新质战斗力
-
持续投入:确保年研发投入不低于10亿元,关键技术预研提前5-10年
7.3 后续工作
-
建立体系架构动态更新机制,每半年评估优化
-
开展大规模仿真推演,验证极端场景下的鲁棒性
-
加强国际合作,参与国际标准制定
-
建立军民融合创新平台,加速技术转化应用
附录:主要模型清单
-
AV-1:概述与摘要信息
-
AV-2:集成词典
-
OV-1:高级作战概念图
-
OV-2:作战节点连接性描述
-
OV-4:组织关系图
-
OV-5:作战活动模型
-
OV-6c:事件跟踪描述
-
SV-1:系统接口描述
-
SV-2:系统资源流描述
-
SV-4:系统功能描述
-
SV-5b:系统功能到作战活动映射
-
SV-6:系统资源流矩阵
-
SV-7:系统性能参数矩阵
-
SV-8:系统演进描述
-
SV-9:系统技术预测
-
SV-10a:系统规则模型
-
StdV-1:标准轮廓
-
StdV-2:标准预测
-
PV-1:项目组合关系
-
PV-2:项目时间线
-
PV-3:项目与能力映射
-
性能评估模型:蒙特卡洛仿真
-
瓶颈分析模型:鱼骨图分析
-
投资决策模型:成本效益分析

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 16
16 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)